Aplikacje wykorzystujące komunikację cyfrową niejednokrotnie narażone są na liczne zakłócenia, które spowodowane są np. sąsiadującymi liniami magistral, wielowarstwowością płytek PCB i występowaniem przetwornic DC-DC. Najpopularniejszym sposobem zapobiegającym błędom komunikacji jest stosowanie układów separujących, czyli tzw. izolatorów.
W niniejszym opracowaniu wyjaśniono podstawowe zasady działania izolatora, przedstawiono obecne produkty firmy Texas Instruments z tego zakresu (izolatory z rodziny ISO72xx) oraz omówiono sugerowany sposób umieszczenia ich w projekcie systemu (wskazówki dotyczące projektu płytki drukowanej kompatybilnej elektromagnetycznie). Dalsze informacje można znaleźć w kartach katalogowych i podręczniku użytkownika układów ISO72xx.
Ogólna zasada działania
Izolator przedstawiony na rysunku 1 oparty jest na zasadzie pojemnościowej bariery izolacyjnej. Urządzenie składa się z dwóch kanałów: kanału wysokiej częstotliwości (HF) o paśmie od 100 kbps do 150 Mbps, oraz kanału niskiej częstotliwości (LF) obsługującego zakres od 100 kbps aż do prądu stałego.
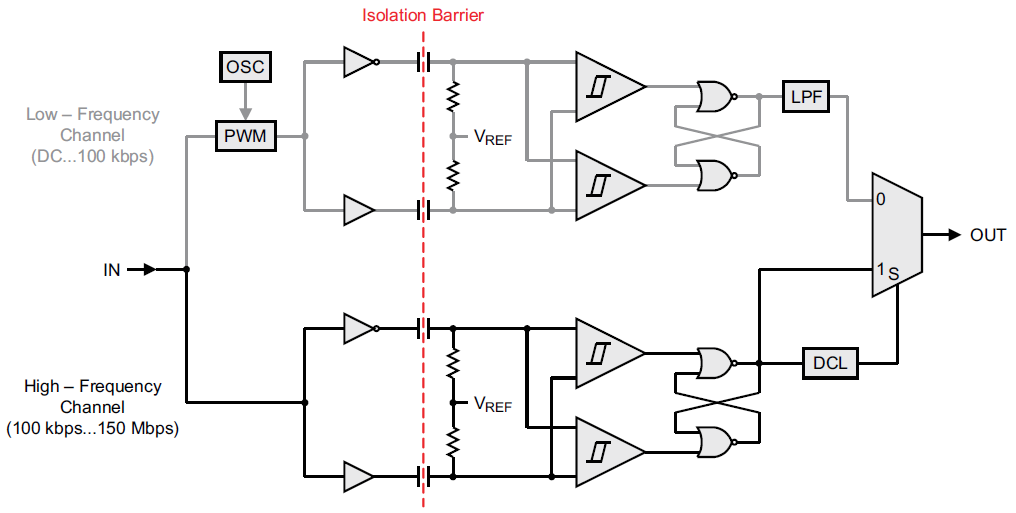
Rys. 1. Schemat blokowy wnętrza cyfrowego izolatora pojemnościowego
Pojedynczy sygnał docierający do kanału HF jest dzielony na sygnał różnicowy poprzez bramkę inwertera na wyjściu. Znajdująca się tam sieć rezystancyjno-pojemnościowa różniczkuje sygnał do postaci napięć przejściowych, które następnie są za pomocą dwóch komparatorów przekształcane na impulsy różnicowe. Wyjścia komparatorów podają sygnał na bramkę NOR typu flip-flop, która następnie zasila multiplekser wyjściowy. Układ logiczny (DCL) na wyjściu przerzutnika flip-flop mierzy odstęp między napięciami przejściowymi. Jeśli odstęp pomiędzy dwoma kolejnymi impulsami przekracza pewien ustalony limit czasu (jak w przypadku sygnału o niskiej częstotliwości), DCL zmusza multiplekser wyjściowy do zmiany z kanału wysokiej częstotliwości na kanał niskiej częstotliwości.
Ponieważ sygnały wejściowe niskiej częstotliwości wymagałyby, aby wewnętrzne kondensatory przyjęły niedopuszczalnie duże wartości, sygnały te są poddawane modulacji szerokości impulsu (PWM) o częstotliwości nośnej pochodzącej z wewnętrznego oscylatora, w efekcie osiągając wystarczająco wysoką częstotliwość, aby przedostać się przez barierę pojemnościową. Podczas modulacji impulsu filtr dolnoprzepustowy jest potrzebny, aby usunąć nośną o wysokiej częstotliwości z przesyłanych informacji przed podaniem jej na wyjściowy multiplekser.
Praca kanału HF
Na rysunku 2 przedstawiono kanał wysokiej częstotliwości i przebiegi w określonych punktach układu. Pojedynczy sygnał wejściowy jest dzielony na składowe różnicowe A i ⌐A (negacja A). Każda składowa jest różniczkowana do przebiegów przejściowych B i ⌐B. Następnie komparatory porównują zróżniczkowane sygnały. Tak długo, jak dodatnie wejście komparatora jest na potencjale wyższym, niż wejście ujemne, na wyjściu komparatora pojawia się stan wysoki, zamieniając przebieg wejściowy na krótki impuls wyjściowy. Impulsy wyjściowe ustawiają i resetują przerzutnik z bramką NOR. Z tablicy prawdy można odczytać, iż konfiguracja z bramką NOR zapobiega odwróceniu stanu przerzutnika, zatem wysoki stan C ustawia wysoki stan na wyjściu ⌐D, a wysoki stan C powoduje stan wysoki na wyjściu D. Ponieważ impulsy tworzone przez komparator są krótkie, czasami na obu wyjściach pojawia się stan niski. W tym czasie przerzutnik utrzymuje swój poprzedni stan wyjścia. Ponieważ sygnał ⌐D ma identyczny kształt i fazę, jak sygnał wejściowy, ⌐D stanowi wyjście kanału wysokiej częstotliwości i jest podawany na multiplekser wyjściowy.
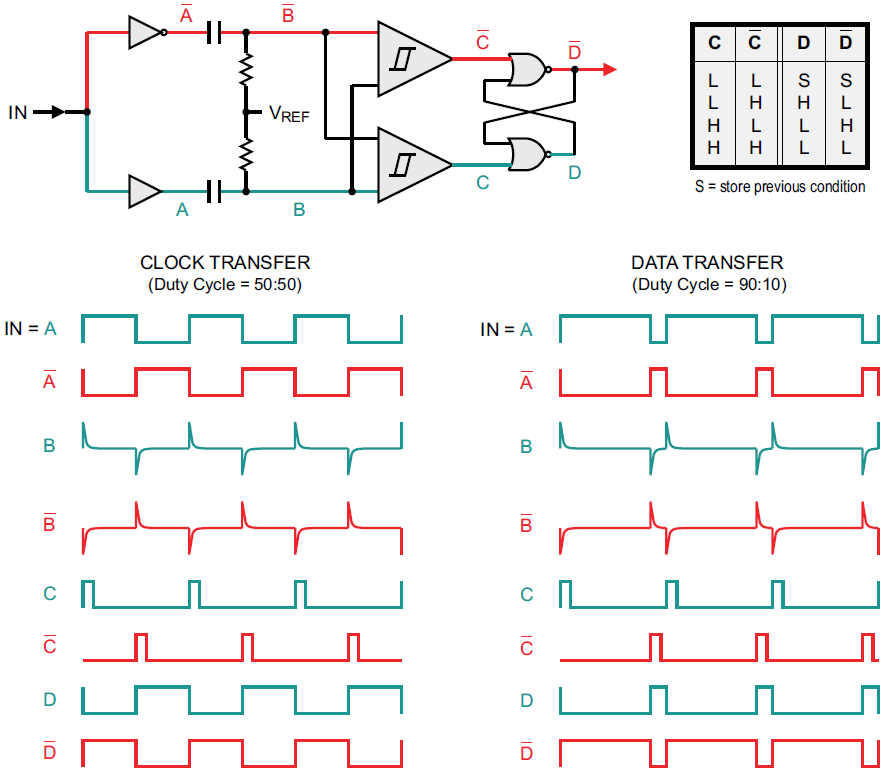
Rys. 2. Przebiegi czasowe w kanale wysokiej częstotliwości
Podczas gdy sygnały wejściowe o symetrycznych współczynnikach wypełnienia generują równo oddalone impulsy, sygnały niesymetryczne (pokazane na prawym wykresie rysunku 2) powodują przesunięcie impulsów komparatora bliżej, by zachować kształt i zależności fazowe sygnału wejściowego.
Praca kanału LF
Wolne sygnały wejściowe są poddawane modulacji szerokości impulsu nośną o wysokiej częstotliwości tak, aby współczynnik wypełnienia liczony jako stosunek stanu wysokiego do niskiego wyniósł 90:10 w węźle A. Od tego punktu przetwarzanie sygnału przebiega identycznie, jak asymetryczne przetwarzanie sygnału w kanale wysokiej częstotliwości. Jedynym wyjątkiem jest filtracja dalszych składowych w kanale niskiej częstotliwości (⌐D) przez dolnoprzepustowy filtr RC przed podaniem na multiplekser wyjściowy.
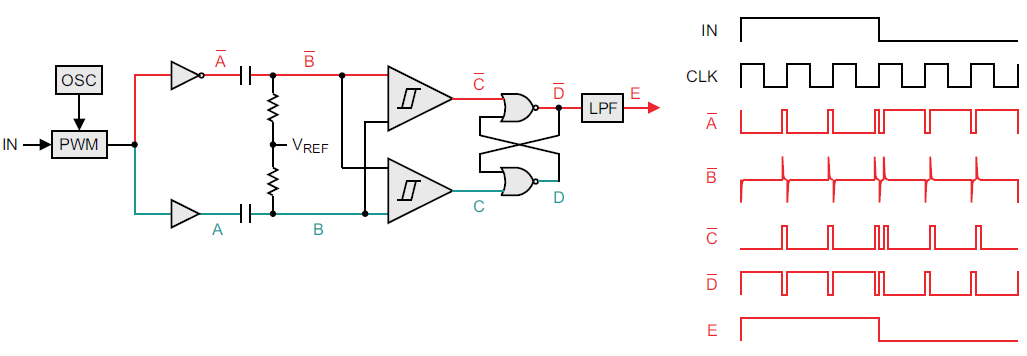
Rys. 3. Przebiegi czasowe w kanale niskiej częstotliwości