


Ze względu na duże zainteresowanie naszych Czytelników robotem FREEbot, redakcja portalu Mikrokontroler.pl postanowiła rozszerzyć opis tej konstrukcji o szczegółową instrukcję jej wykonania. Urządzenie nie jest wymagające pod względem umiejętności technicznych – wystarczy podstawowa znajomość zagadnień elektroniki, programowania mikrokontrolerów oraz kilka godzin wolnego czasu.

Przed przystąpieniem do pracy, należy zaopatrzeć się w odpowiednie narzędzia, podzespoły i oprogramowanie.
Narzędzia:
- śrubokręt,
- małe kombinerki,
- lutownica,
- (opcjonalnie) wiertarka z wiertłem o średnicy 3 mm.
Podzespoły:
- Freedom KL25Z,
- Arduino Motor Shield R3,
- QTR-8A (Pololu 960),
- Przetwornica Step-Down D24V3ALV (Pololu 2101),
- MiniQ-2WD Platforma Mobilna DFRobot (ROB0049),
- Zestaw przewodów M-M w różnych kolorach,
- Akumulator litowo-polimerowy, 7,4 V,
- tulejki dystansowe,
- śrubki montażowe,
- przełącznik 2-stanowy,
- 2 gumki recepturki.
Oprogramowanie:
- Środowisko programistyczne Code Warrior z wtyczką Processor Expert.
Zaczynamy od przygotowania podzespołów do montażu. Do płytki czujników QTR-8A dołączona jest listwa goldpin „męska”, ale proponuję zastosowanie żeńskiej – w przeciwnym wypadku trzeba będzie dokupić komplet przewodów M-F w różnych kolorach. Montujemy tulejki dystansowe, dokręcając je śrubami. Skorzystałem z tulej i śrub M3, ale można wykorzystać dowolne o średnicy mniejszej, niż otwory w płytce. Należy pamiętać, by przylutować zworkę w miejsce 3,3 V BYPASS (oznaczone na zdjęciu poniżej).
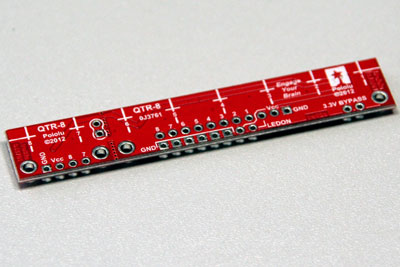
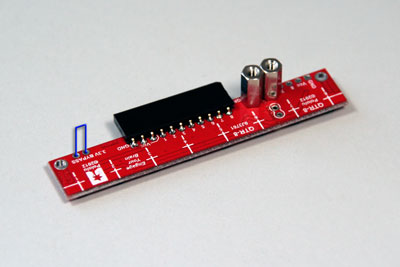
Przygotowanie listwy czujników QTR-8A
Montaż podwozia jest stosunkowo prosty, trudność może sprawić w zasadzie tylko stabilne przytwierdzenie silników do chassis. Wszystkie niezbędne części znajdują się w zestawie.

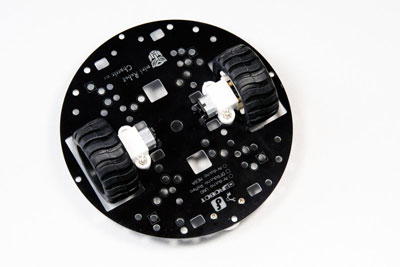
Montaż podwozia
Po wstępnych „przymiarkach” należy też przylutować przewody do silników. Polaryzacja nie ma na obecną chwilę znaczenia, zawsze istnieje możliwość zmiany oprogramowania lub sposobu podłączenia silnika do terminala śrubowego na płytce Arduino Motor Shield R3. Przewody powinny być z wolnej strony odizolowane i pobielone cyną, aby łatwiej można było je zamontować w złączu.

Przewody przylutowane do wyprowadzeń silników
Sterownik KL25Z jest w pełni zgodny pinowo z akcesoriami dedykowanymi do platformy Arduino, czego dowodem może być połączenie go z płytką Arduino Motor Shield R3. Ten sposób montażu jest bardzo wygodny, bo zaoszczędza przestrzeń na podwoziu robota oraz umożliwia prosty dostęp do gniazd każdej z płytek. W dalszej części artykułu, na rysunkach mogą być przedstawiane osobno dla wygody prezentacji połączeń, ale docelowo płytki należy złożyć „piętrowo” – jak na jednym z poniższych zdjęć.


Arduino Motor Shield R3 pasuje do sterownika KL25Z
Przy montażu przetwornicy również polecam zastosowanie gniazd goldpin typu „żeńskiego”, a dodaktowo przylutowanie ich z obu stron płytki – tak, by pod każdy pad można było podłączyć dwa przewody typu męskiego. Jest to spowodowane niedostatecznie dużą liczbą zduplikowanych wyprowadzeń sygnałów na płytkach.
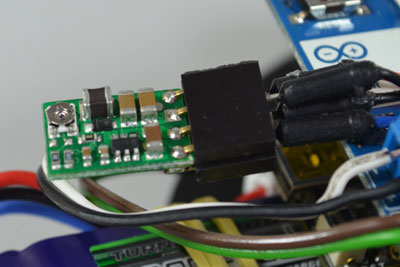
Montaż listwy na przetwornicy
Przystępujemy do podłączenia czujników. Pamiętamy, by nie pomylić się w prowadzeniu przewodów, gdyż zachowanie robota stanie się w pewnych sytuacjach nieprzewidywalne.
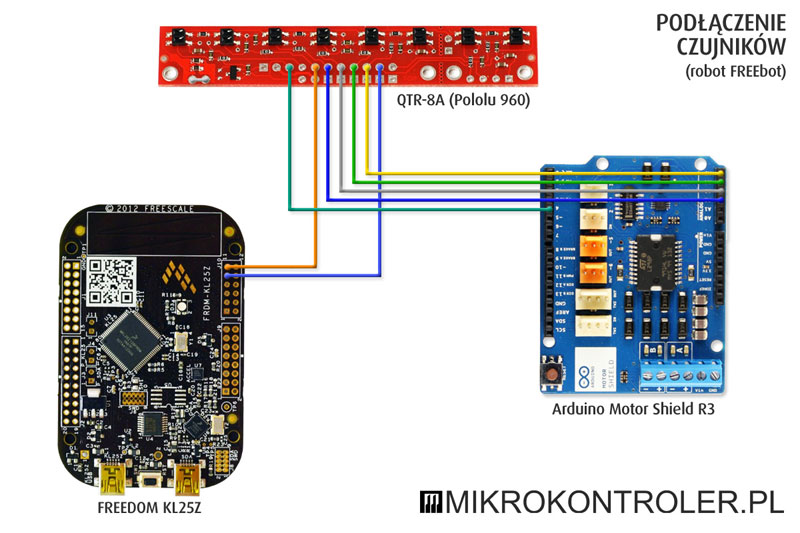
Podłączenie czujników QTR-8A



