


W pierwszej części artykułu o druku 3D zostały opisane technologie oraz materiały, które są wykorzystywane w drukarkach 3D. W drugiej skupię się na budowie drukarek 3D pracujących w technologii FDM.
Na rynku dostępne są różnego rodzaju drukarki 3D, które różnią się wielkością pola roboczego, ilością dysz itp. Dzięki użyciu dwóch dysz możliwy jest druk dwukolorowy lub drukowanie skomplikowanych elementów np. z rozpuszczalnymi podporami. W artykule zostaną przedstawione różne konstrukcje drukarek oraz elementy, z których są one zbudowane.


Najważniejszym elementem każdej drukarki 3D jest jej elektronika sterująca. To ona odczytuje kod G code (np. zapisany na karcie pamięci), steruje pracą silników, grzałek oraz innych elementów drukarki. Bardzo popularne są sterowniki, które składają się z płytki Arduino Mega z odpowiednim shieldem (np. RAMSP 1.4 widoczny na rysunku 1), który zawiera odpowiednie złącza (na sterowniki silników) oraz tranzystory MOSFET do sterowania grzałką lub stołem grzewczym. Dostępne są również sterowniki oparte o mikrokontrolery 32-bitowe. Zapewniają one większą wydajność niż mikrokontrolery 8-bitowe, a co za tym idzie pozwalają na bardziej skomplikowaną mechanikę drukarki 3D lub podłączenie kolorowego wyświetlacza LCD, za pomocą którego możliwe jest sterowanie drukarką.
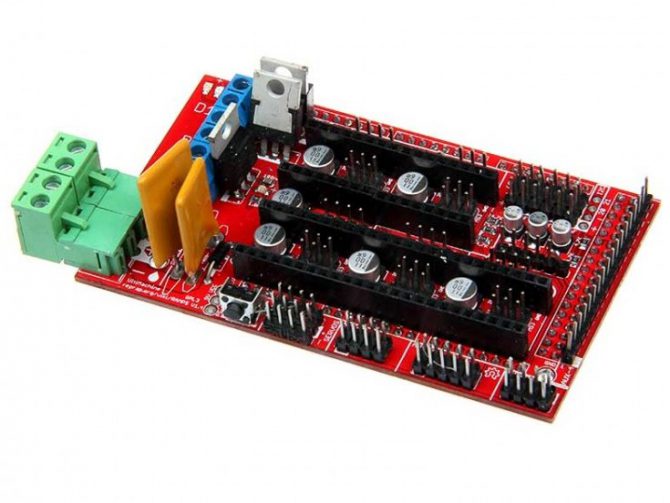
Rys. 1. Sterownik RAMPS 1.4 zamontowany na Arduino MEGA [1]
Aby głowica drukarki mogła poruszać się w przestrzeni 3D potrzebne są odpowiednie napędy. W drukarkach 3D są to silniki krokowe, które pozwalają na uzyskanie dużej dokładności (co jest istotne przy drukowaniu). Zazwyczaj używa się silników, które posiadają 200 kroków na jeden obrót wału (1,8 stopnia na krok). Rzadziej stosuje się silniki które posiadają 400 kroków na obrót, zapewniają one większą dokładność oraz ich praca jest cichsza, jednak są one droższe.

Rys. 2. Silnik krokowy 200 kroków/obrót używana w drukarkach 3D [2]
Drukarki 3D mogą mieć różne mechaniki. Każda mechanika ma swoje zalety i wady. Obecnie najpopularniejszy jest układ kartezjański, który jest spotkany np. w Prusie i3 MK2 Josefa Prusy (rysunek 3). W tej drukarce osie X, Y mają po jednym silniku, natomiast oś Z jest napędzana przez dwa silniki krokowe. Każda oś ma swój niezależny silnik, który odpowiada za poruszanie w danej osi.
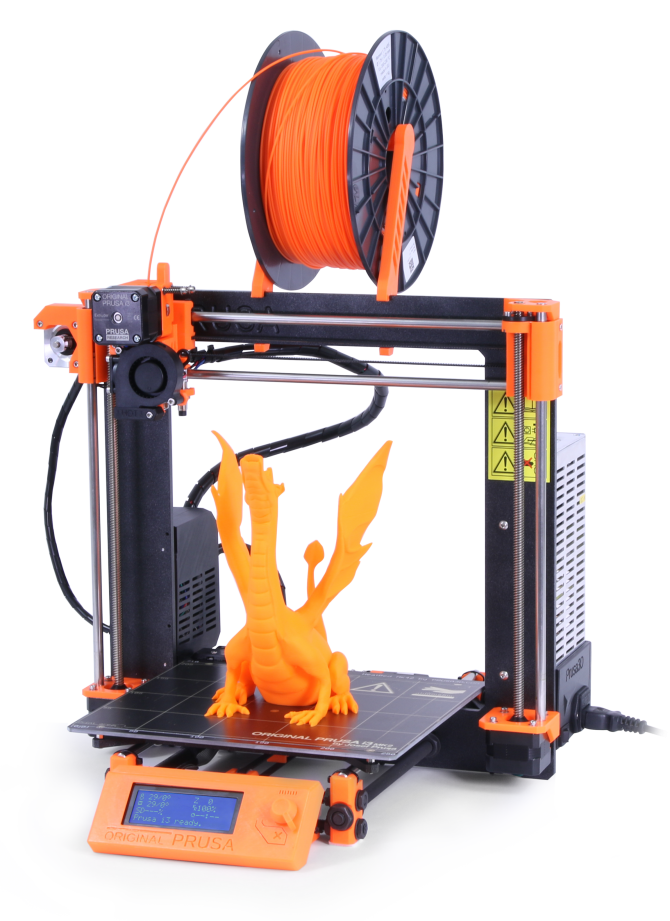
Rys. 3. Drukarka Prusa i3 MK2S – drukarka w układzie kartezjańskim [3]
Innym rodzajem mechaniki jest CoreXY (rysunek 4), Karetka z głowicą porusza się w osiach X oraz Y, natomiast stół porusza się w osi Z. Ruch w osiach X oraz Y jest realizowany przez dwa silniki krokowe, które muszą pracować z różną prędkością, aby wypracować ruch np. w osi X.
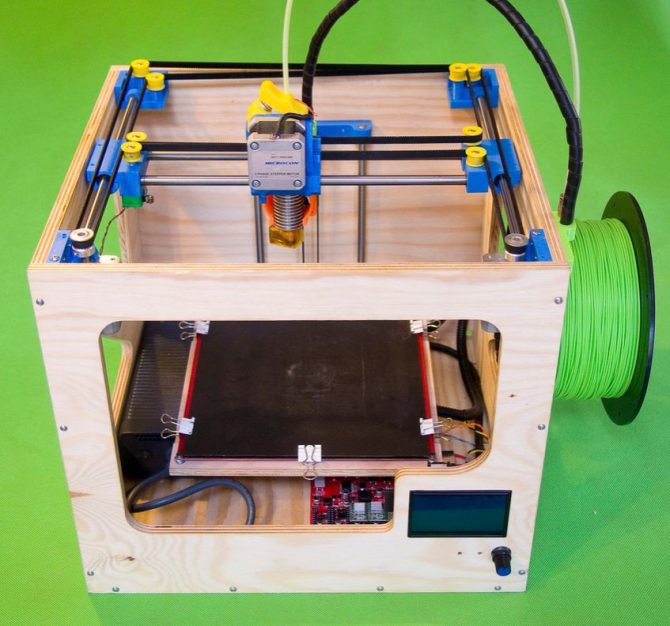
Rys. 4. X3D XS COREXY – drukarka w układzie CoreXY [4] [5]
Drukarki w układzie delta (rysunek 5) posiadają 3 ramiona, które schodzą się w jedno miejsce gdzie znajduje się karetka z hotendem. Dla tego typu drukarki zalecane są sterowniki oparte o mikrokontrolery 32-bitowe z uwagi na złożone obliczenia. Zaletami tego typu urządzeń jest szybkość drukowania – możliwe jest uzyskiwanie prędkości druku 100-150 mm/s oraz uzyskiwanie wysokich wydruków w stosunkowo kompaktowej wielkości drukarki. Wadą jest trudna kalibracja.

Rys. 5. Drukarka w układzie Delta – Kossel Delta [6]



