


W artykule przedstawiono projekt prostej stacji pogodowej opartej o moduł DFRobot z czujnikiem BME280 firmy Bosch. Sensor ten pozwala na pomiar temperatury, wilgotności powietrza oraz ciśnienia. Wyniki pomiarów zostały wyświetlone na wyświetlaczu 2×16 znaków z podświetleniem RGB. W projekcie wykorzystano moduły i komponenty współpracujące ze standardem Gravity, co pozwala na łatwe zbudowanie układu elektronicznego niezbędnego do zrealizowania projektu.


Do realizacji projektu potrzebne są następujące elementy:
- Płytka KAmduino UNO
- DFRobot Gravity BME280 – czujnik temperatury, wilgotności oraz barometr
- DFRobot Gravity Wyświetlacz 2×16 znaków z podświetleniem RGB
- DFRobot Gravity IO Expansion Shield v7.1 do Arduino
- Kabel USB A – micro-USB B, zwijany, 73cm
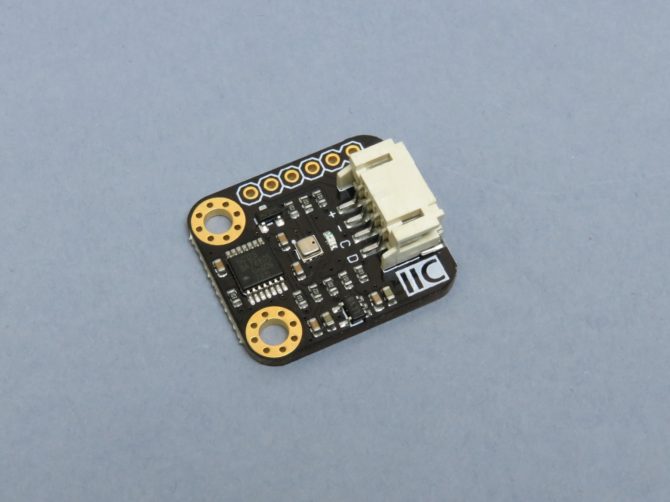
Rys 1. Czujnik DFRobot Gravity BME280
Użyty w projekcie moduł został oparty na czujniku BME280 firmy Bosch. W jednym układzie zintegrowano w nim czujnik temperatury, wilgotności oraz ciśnienia. Sensor pozwala na pomiar temperatury w zakresie -40…+85 ℃, pomiar wilgotności w zakresie 0…100% RH, oraz pomiar ciśnienia w zakresie 300…1100 hPa. Użyty sensor cechuje się bardzo dobrą dokładnością oraz niewielkim błędem. Do komunikacji wykorzystuje interfejs I2C lub SPI. Moduł posiada złącze zgodne z standardem Gravity (interfejs I2C).
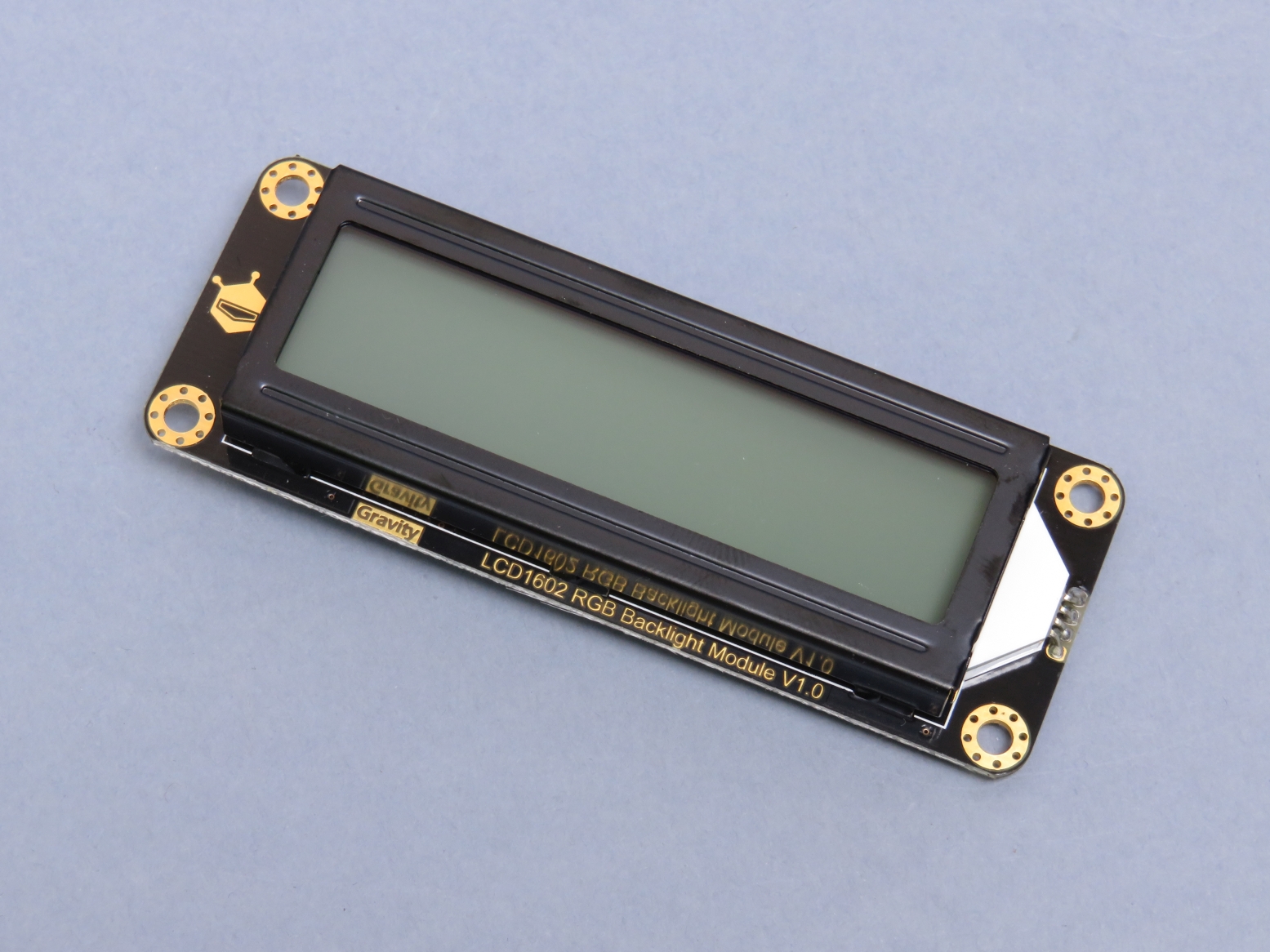
Rys 2. DFRobot Gravity wyświetlacz 2×16 znaków z podświetleniem RGB
Zmierzone wartości temperatury, wilgotności oraz ciśnienia są wyświetlane na wyświetlaczu 2×16 znaków z podświetleniem RGB. Został on wyposażony w konwerter, dzięki któremu komunikacja odbywa się przy pomocy interfejsu I2C. Moduł ma wyprowadzenie zgodne z standardem Gravity. W zestawie z modułem znajduje się również przewód Gravity. Wyświetlaczowi został poświęcony osobny artykuł p.t. [PRZYKŁAD] Wyświetlacz LCD Gravity z podświetlaniem RGB i KAmduino UNO
Do podłączenia modułu z czujnikiem BME280 oraz wyświetlacza LCD 2×16 do płytki KAmduino Uno wykorzystano nakładkę rozszerzającą – DFRobot Gravity IO Expansion Shield v7.1
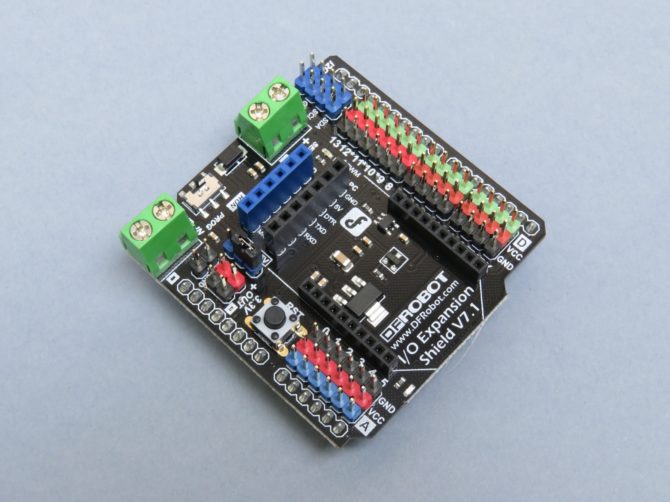
Rysunek 3. DFRobot Gravity IO Expansion Shield v7.1 do Arduino
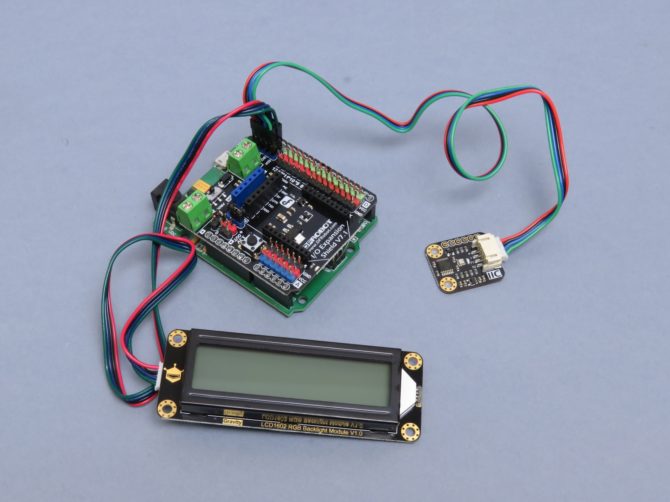
Płytka ta pozwala na łatwe podłączenie modułów z serii Gravity do płytek Arduino, ponadto posiada złącze dla modułu łączności Xbee oraz do podłączenia zewnętrznego źródła zasilania. Ponieważ oba moduły wykorzystują do komunikacji interfejs I2C, należy podłączyć je do miejsca opisanego I2C na module DFRobot Gravity IO Expansion Shield v7.1 (jak na zdjęciu 4). Należy zwrócić uwagę na orientacje wtyczek – czerwony przewód (5 V), powinien znajdować się bliżej krawędzi płytki, zgodnie z opisem na płytce.
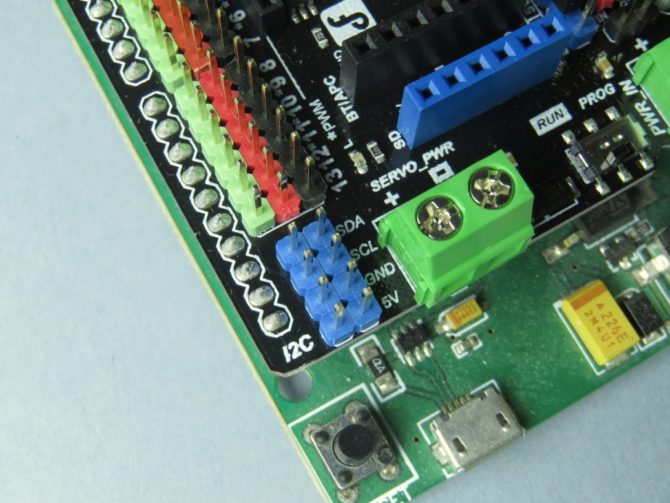
Rys 4. Złącze I2C do którego należy podłączyć moduły użyte w projekcie
Zmontowany układ prezentuje się następująco:
Rysunek 5. Zmontowany układ potrzebny do realizacji projektu



