





ZL31ARM: implementacja funkcji graficznych 2D
Celem projektu jest przygotowanie procedur programowych do wyświetlenia prostych konstrukcji graficznych typu punkt, linia, figury geometryczne 2D, ich transformacja w postaci obrotów i przesunięć.
Do przygotowania przykładowych procedur wykorzystano modułu z wyświetlaczem LCD (KAmodTFT2 firmy KAMAMI.pl) oraz komputerek zintegrowany z programatorem JTAG – ZL31ARM z wbudowanym mikrokontrolerem STM32F103RB. Schemat elektryczny połączeń linii we/wy mikrokontrolera STM32 i modułu KAmodTFT2 pokazano na rysunku 1.
Rys. 1. Schemat podłączenia przycisków i wyświetlacza (zestawy ZL31ARM+KAmodTFT2)
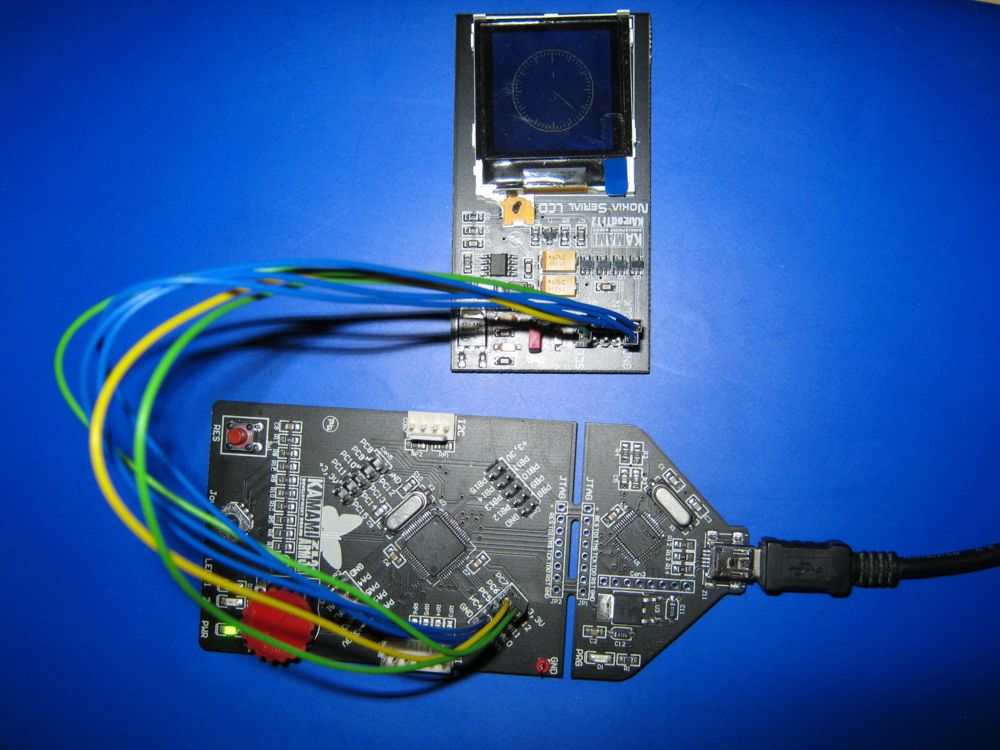
Wygląd połączonych ze sobą elementów zestawu testowego (ZL31ARM oraz KAmodTFT2) pokazano na fotografii 2.
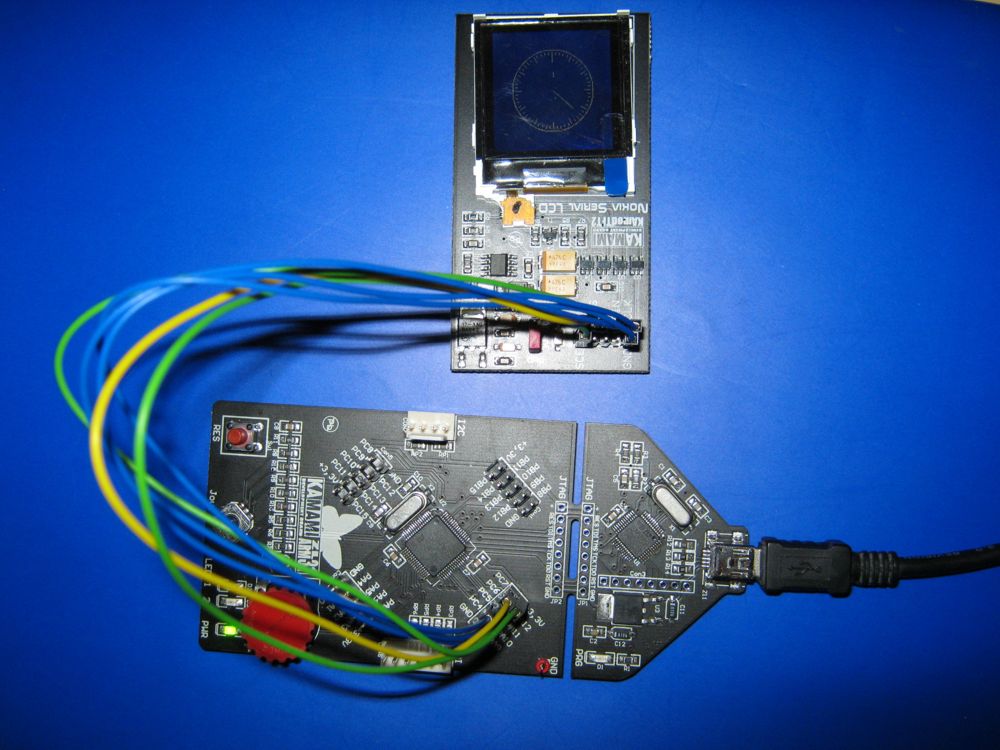
Fot. 2. Wygląd zestawu testowego
Na fotografii 3 przedstawiono w jaki sposób związano układ współrzędnych, w którym operuje się standardowo (w zakresie od 1 do 130), z powierzchnią wyświetlacza.
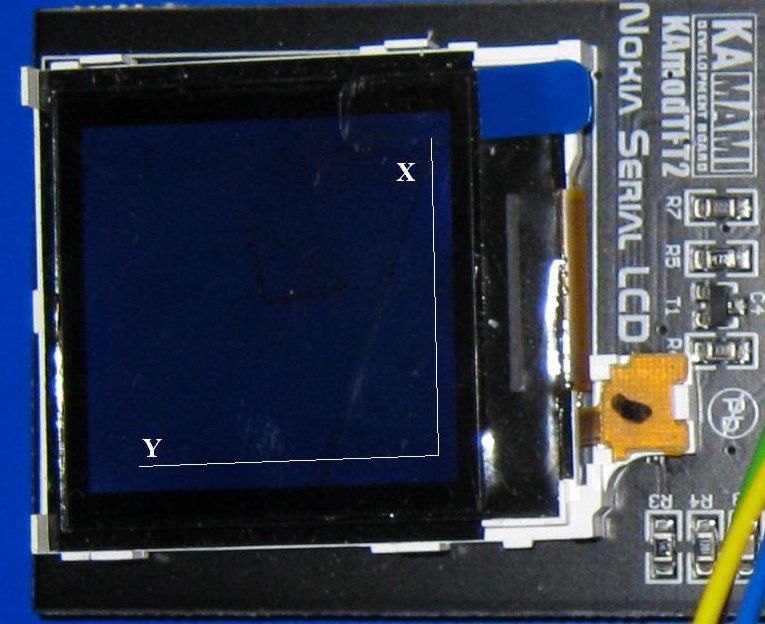
Fot. 3. Standardowy układ współrzędnych
Programy opisane w artykule powstały na bazie bibliotek opisanych w książce „Mikrokontrolery STM32 w praktyce”, dlatego przed rozpoczęciem ich testowania należy pobrać pliki źródłowe przykładów z tej książki (dostępne m.in. na stronie Wydawnictwa BTC). W pliku archiwum znajduje się katalog Libraries, który należy skopiować do katalogu z zainstalowanym środowiskiem µVision (np. C:\Keil\ARM\). Z biblioteki należy wybrać potrzebne pliki i dodać je do własnego projektu: przykładowo plik stm32f10x_conf.h można skopiować np. z katalogu \Project\R9_sd_fatfs tejże biblioteki i nie wymaga on żadnej modyfikacji. Następnie klikamy na Options for Target… i w zakładce C/C++ w polu Define dodajemy następujące parametry: STM32F10X_MD, USE_STDPERIPH_DRIVER. Oprócz tego należy dodać ścieżki dostępu do plików źródłowych w Include Paths (rysunek 4). W zakładce Debug wybieramy Use ST-Link (Deprecated Version) i to samo robimy w zakładce Utilities, gdzie występuje pole Use Target Driver for Flash Programming.
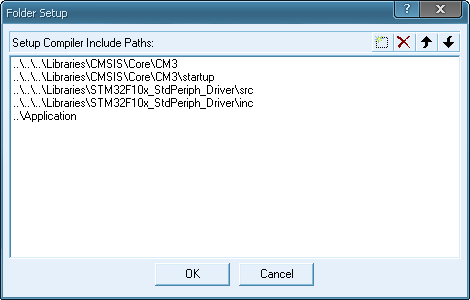
Rys. 4. Dodane ścieżki dostępowe Include Paths
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






