





Analizator widma z FFT na STM32 z Cortex-M4
Odbiór sygnału audio z mikrofonu
Kiedy mamy pewność, że wyznaczanie widma częstotliwościowego sygnału działa poprawnie to możemy iść dalej i zamiast przygotowanego wcześniej sygnału wykorzystać sygnał odbierany z mikrofonu. Przedtem jednak konfigurujemy wykorzystywane peryferia:
static void RCC_Configure(void){
/********/
/* AHB1 */
/********/
// Włączenie sygnału taktującego układ CRC jest wymagane przez bibliotekę PDM
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB | RCC_AHB1Periph_GPIOC |
RCC_AHB1Periph_CRC, ENABLE);
/********/
/* APB1 */
/********/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);
// Włączenie sygnału taktującego dla układu I2S
RCC_PLLI2SCmd(ENABLE);
}
static void NVIC_Configure(void){
NVIC_InitTypeDef NVIC_InitStructure;
// Konfiguracja grupy priorytetów
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
// Konfiguracja przerwań od SPI2 (w tym również dla I2S2)
NVIC_InitStructure.NVIC_IRQChannel = SPI2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
}
static void GPIO_Configure(void){
GPIO_InitTypeDef GPIO_InitStructure;
// Konfiguracja linii PB10 podłączonej do CLK układu MP45DT02 – funkcja I2S2_CLK
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_25MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// Konfiguracja linii PC3 podłączonej do DOUT układu MP45DT02 - funkcja I2S2_DATA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_25MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource10, GPIO_AF_SPI2); // Podłączenie PB10 do SPI2
GPIO_PinAFConfig(GPIOC, GPIO_PinSource3, GPIO_AF_SPI2); // Podłączenie PC3 do SPI2
}
static void I2S_Configure(void){
I2S_InitTypeDef I2S_InitStructure;
SPI_I2S_DeInit(SPI2);
I2S_InitStructure.I2S_AudioFreq = OUT_FREQ*2;
I2S_InitStructure.I2S_Standard = I2S_Standard_LSB;
I2S_InitStructure.I2S_DataFormat = I2S_DataFormat_16b;
I2S_InitStructure.I2S_CPOL = I2S_CPOL_High;
I2S_InitStructure.I2S_Mode = I2S_Mode_MasterRx;
I2S_InitStructure.I2S_MCLKOutput = I2S_MCLKOutput_Disable;
I2S_Init(SPI2, &I2S_InitStructure);
// Włączenie przerwań od zapełnienia bufora odbiorczego I2S2
SPI_I2S_ITConfig(SPI2, SPI_I2S_IT_RXNE, ENABLE);
}
Po skonfigurowaniu peryferii można wykonać inicjalizację biblioteki PDM:
Filter.Fs = OUT_FREQ; // Częstotliwość próbkowania Filter.HP_HZ = 10; // Częstotliwość odcięcia filtru górnoprzepustowego Filter.LP_HZ = 16000; // Częstotliwość odcięcia filtru dolnoprzepustowego Filter.In_MicChannels = 1; // Liczba kanałów wejściowych Filter.Out_MicChannels = 1; // Liczba kanałów wyjściowych PDM_Filter_Init(&Filter); // Inicjalizacja biblioteki PDM
W pliku main.h zdefiniowane są stałe wykorzystywane w programie:
#define DECIMATION_FACTOR 64 #define OUT_FREQ 32000 #define PDM_Input_Buffer_SIZE ((OUT_FREQ/1000)*DECIMATION_FACTOR/8) #define PCM_Output_Buffer_SIZE (OUT_FREQ/1000) #define SPECTRUM_BG_COLOR Black #define SPECTRUM_FREQ_S_kHz 32.0 #define SPECTRUM_HEIGHT 150 #define SPECTRUM_NR_SAMPLES 512 #define SPECTRUM_X_LABEL "[kHz]"
Warto zwrócić uwagę na konfigurację układu I2S oraz biblioteki PDM pod względem wartości częstotliwości. Ponieważ biblioteka PDM oferuje cztery funkcje konwertujące sygnał z postaci PDM na PCM (współczynnik decymacji 64 lub 80, dane w kolejności MSB lub LSB; rysunek 14):
int32_t PDM_Filter_64_MSB(uint8_t* data, uint16_t* dataOut, uint16_t MicGain, PDMFilter_InitStruct * Filter); int32_t PDM_Filter_80_MSB(uint8_t* data, uint16_t* dataOut, uint16_t MicGain, PDMFilter_InitStruct * Filter); int32_t PDM_Filter_64_LSB(uint8_t* data, uint16_t* dataOut, uint16_t MicGain, PDMFilter_InitStruct * Filter); int32_t PDM_Filter_80_LSB(uint8_t* data, uint16_t* dataOut, uint16_t MicGain, PDMFilter_InitStruct * Filter);
to wymaganym jest aby częstotliwość na linii CLK układu MP45DT02 była równa:
FCLK = DecimatorFactor · FS
Tak więc, jeśli chcemy uzyskać częstotliwość próbkowania 32 kHz oraz wykorzystać współczynnik decymacji o wartości 64 to częstotliwość na linii CLK powinna wynosić 2048 kHz. Aby ustawić taką wartość w układzie I2S należy wiedzieć, że układ w trybie normalnej pracy odbiera po 16 bitów danych (najmniejsza możliwa wartość pola I2S_DataFormat) na przemian z kanału pierwszego oraz drugiego. A ponieważ w danej sytuacji będzie on cały czas odbierał dane z jednego źródła to na odbiór „próbki z dwóch kanałów” przeznaczone są 32 bity, czyli 2048 kHz / 32 = 64 kHz – taka też wartość jest ustawiana w polu I2S_AudioFreq.
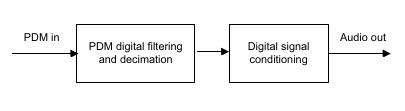
Rys. 14. Proces obróbki sygnału przez bibliotekę PDM
Po włączeniu odbioru danych przez układ I2S komendą I2S_Cmd(SPI2, ENABLE) dane będą najpierw kopiowane do rejestru odbiorczego, a następnie w przerwaniu zostaną przeniesione do bufora PDM_Input_Buffer. Gdy bufor ten zostanie całkowicie zapełniony to wykona się funkcja PDM_Filter_64_LSB() konwertująca sygnał z postaci PDM do postaci PCM (plik stm32f4xx_it.c):
uint32_t InternalBufferSize = 0;
uint32_t Data_Status = 0;
void SPI2_IRQHandler(void){
extern PDMFilter_InitStruct Filter;
extern uint8_t PDM_Input_Buffer[];
extern uint16_t PCM_Output_Buffer[];
u16 volume;
u16 app;
// Sprawdź czy są dostępne nowe dane
if (SPI_GetITStatus(SPI2, SPI_I2S_IT_RXNE) != RESET){
// Odczytaj dane i zapisz do bufora – najpierw młodszy potem starszy bajt
app = SPI_I2S_ReceiveData(SPI2);
PDM_Input_Buffer[InternalBufferSize++] = (uint8_t)app;
PDM_Input_Buffer[InternalBufferSize++] = (uint8_t)HTONS(app);
// Sprawdź czy bufor jest pełny
if (InternalBufferSize >= PDM_Input_Buffer_SIZE){
InternalBufferSize = 0;
volume = 50;
PDM_Filter_64_LSB(PDM_Input_Buffer, PCM_Output_Buffer, volume, &Filter);
Data_Status = 1;
}
}
}
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




