





[DIY] Bezpłatne środowisko programistyczne (Eclipse+GCC) dla mikrokontrolerów KINETIS
Teraz przechodzimy do ważnego okna, w którym podajemy informacje: z jakiego chcemy korzystać toolchaina i podajemy jego ścieżkę tak jak widać na rysunku 6. Po czym klikamy Finish i projekt zostaje utworzony. Teraz możemy sprawdzić czy narzędzia Build Tools i Toolchain działają prawidłowo: klikamy Build i w konsoli po chwili zobaczymy widok jak na rysunku 7.
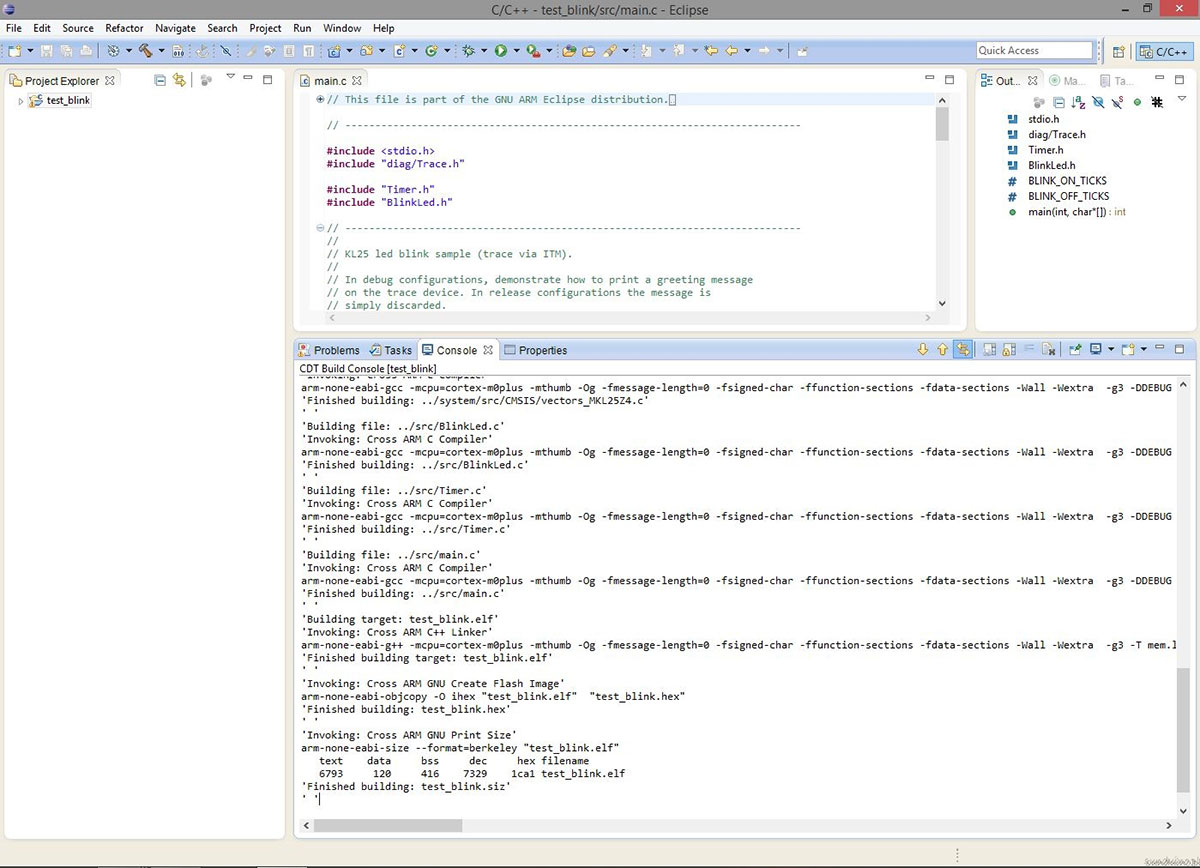
Rys. 7. Poprawne wykonanie „buildowania” jest potwierdzone komunikatami w konsoli Eclipse
Jak widać projekt został „zbuildowany” prawidłowo, teraz pozostaje nam skonfigurowanie debuggera sprzętowego, gdyż – choć nasz projekt już się kompiluje – nie mamy jak go wgrać do pamięci mikrokontrolera, a tym bardziej uruchomić… Ponieważ osobiście bardzo lubię J-Linka w środowisku zintegrujemy serwer GDB Segger. Żeby nam się wygodnie pracowało musimy pobrać ze strony firmy Segger GDB Server i go zainstalować.
W przypadku korzystania z zestawów OpenSDA z mikrokontrolerami z rodzin KL25Z, K46Z oraz K64F wystarczy zmiana firmware wbudowanego w nie programatora na J-Link SDA.
Przygotowany opis czynności bazuje na J-Link Open SDA, ale w przypadku innych wersji interfejsu J-Link wygląda to dokładnie tak samo. Polecam też zakup J-Link EDU , który jest dostępny w naprawdę dobrej cenie i posiada pełną funkcjonalność J-Link Base, jedynie licencja ogranicza możliwość komercyjnego użycia tego interfejsu (dla amatorów to nie ma znaczenia).
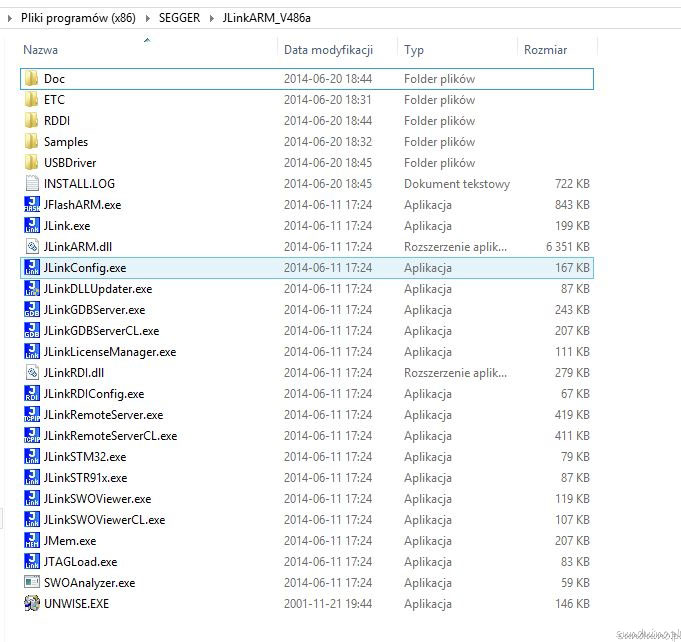
Rys. 8. Zalecana lokalizacja instalacji programu JLinkGDBServer
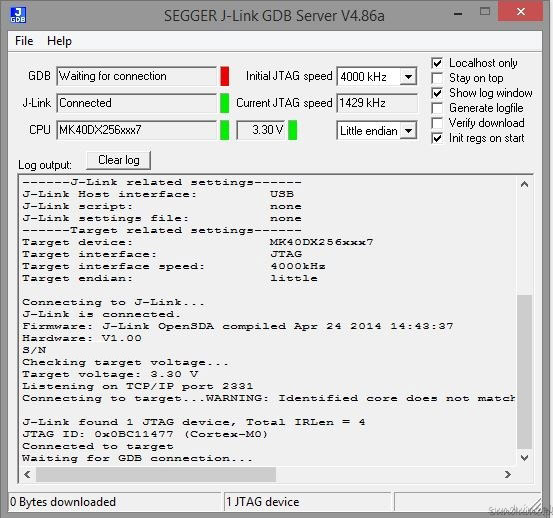
Rys. 9. Widok okna programu JLinkGDBServer
Gdy pobraliśmy i zainstalowaliśmy oprogramowanie sterujące pracą J-Linka w domyślnej lokalizacji (rysunek 8), sprawdzamy czy interfejs działa prawidłowo uruchamiając JLinkGDBServer.exe (rysunek 9).
Jak widać, interfejs działa, więc przystępujemy do dalszych ustawień w Eclipse. W tym celu uruchamiamy Eclipse i wybieramy z menu „robaka” opcję Debug Configuration (rysunek 10).
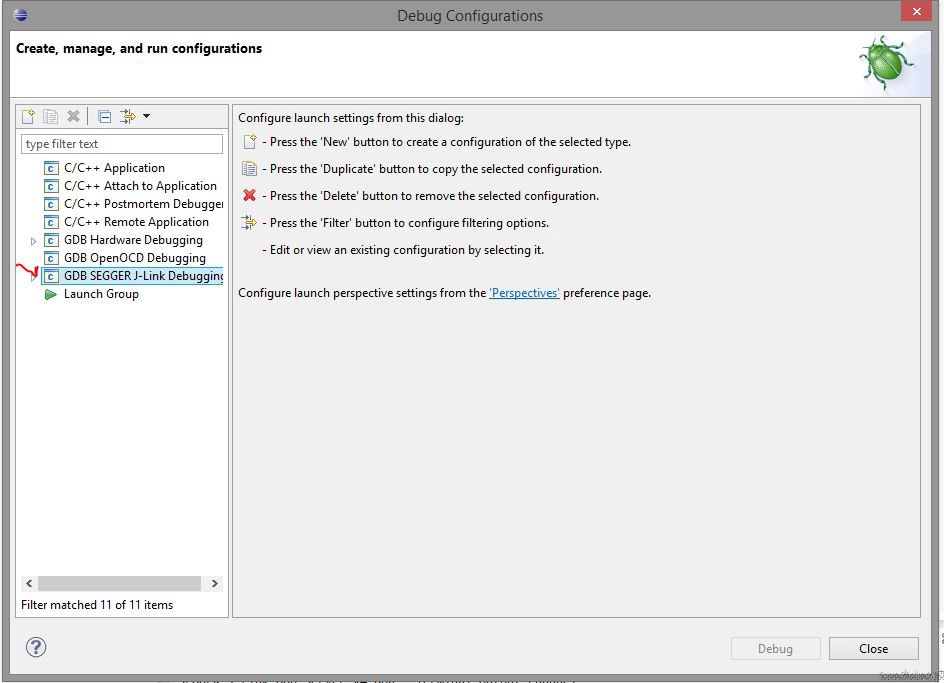
Rys. 10. Okno selekcji sprzętu używanego do debugowania
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






