





[PRZYKŁAD] Sterownik silnika krokowego Tic T834 – sterowanie przy wykorzystaniu USB
W przykładzie zaprezentowano działanie sterownika Tic T834 firmy Pololu. Przestawiona aplikacja umożliwia sterowanie silnikiem krokowym (położeniem wału, prędkością obrotową) oraz zmianę parametrów samego sterownika (mikrokroki, ustawienia interfejsów itp.) z wykorzystaniem USB. Silniki krokowe używane są w drukarkach 3D, ploterach rysujących, robotycznych ramionach czy sliderach dla aparatów/kamer.
Do realizacji przykładu wykorzystano:
- sterownik silnika krokowego Tic T834 USB
- silnik krokowy NEMA17 – bipolarny, 200 kroków/obr, 2,8V, 1,7A
- przewód microUSB <> USB
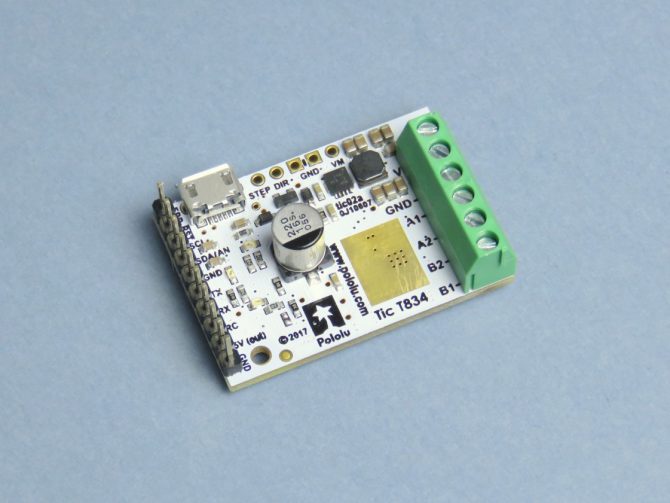
Rysunek 1. Sterownik silnika krokowego Tic T834 USB
Tic T834 to sterownik silnika krokowego oparty na układzie DRV8834. Z jego pomocą można sterować pracą silnika krokowego, który jest zasilany napięciem 2,5…10,8 V na cewkę oraz pobierającego maksymalny prąd na cewkę do 1,5 A. Sterownik można kontrolować za pomocą: USB, TTL (UART), I2C, sygnału RC (PWM modelarski), wejscia analogowego lub wykorzystując enkoder kwadraturowy. Moduł posiada również wejścia STEP i DIR. Podanie stanu wysokiego na wejście STEP spowoduje obrót wału silnika o jeden krok (lub jeden mikrokrok w zależności od ustawień). Kierunek obrotu silnika jest wybierany poprzez podanie odpowiedniego stanu na pin DIR. Układ pozwala na ustawienie mikrokroków do 1/32 pełnego kroku. Zastosowanie mikrokroków pozwala na zwiększenie dokładności obrotu wału silnika.

Rysunek 2. Złącza sterownika silnika krokowego Tic T834 USB
Płytka po lewej stronie posiada wyjście interfejsów, wejście sygnału RC oraz wyprowadzenia zasilania (z wbudowanego stabilizatora). W górnej części znajduje się port microUSB do podłączenia sterownika do komputera. Z prawej strony zaś znajdują zielone złącza śrubowe, do których można podłączyć sterowanie (A1,A2,B1,B2) oraz zasilanie silnika (VIN, GND).
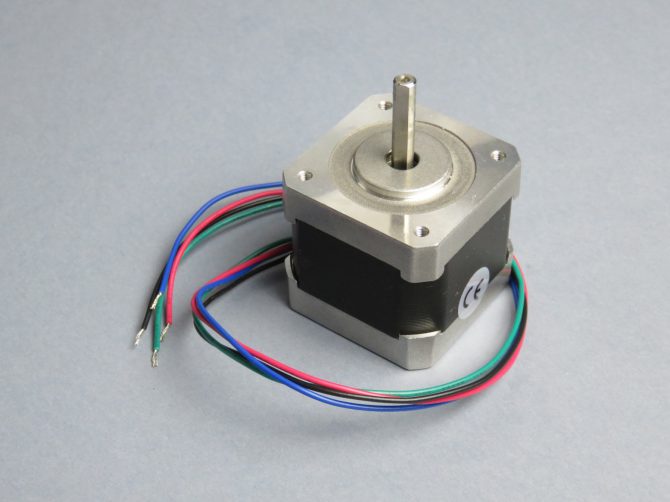
Rysunek 3. Silnik krokowy silnik krokowy NEMA17 – bipolarny, 200 kroków/obr, 2,8V, 1,7A
W projekcie moduł steruje bipolarnym silnikiem krokowym NEMA17. Charakteryzuje się on rozdzielczością 200 kroków/obrót (1,8° na krok). Zasilany może być napięciem 2,8 V, natomiast maksymalny prąd pobierany przez cewkę to 1,7 A. Silniki bipolarne mają wyprowadzone 4 przewody – 2 sterują jedną cewką, kolejne dwie drugą cewką (jak na rysunku poniżej).
Rysunek 4. Podłączenie cewek wewnątrz bipolarnego silnika krokowego użytego w projekcie
Przewody czarny (BLK) oraz zielony (GRN) służą do sterownia pierwszą cewką. Należy je podłączyć odpowiednio do złącz A1 oraz A2. Natomiast przewody czerwony (RED) oraz niebieski (BLU) służą do sterowania drugą cewką i należy je podłączy odpowiednio do złącz B1 oraz B2. Pod piny VIN i GND należy podłączyć zasilanie silnika. Silnik podłączony do sterownika Tic T834 USB prezentuje się następująco:
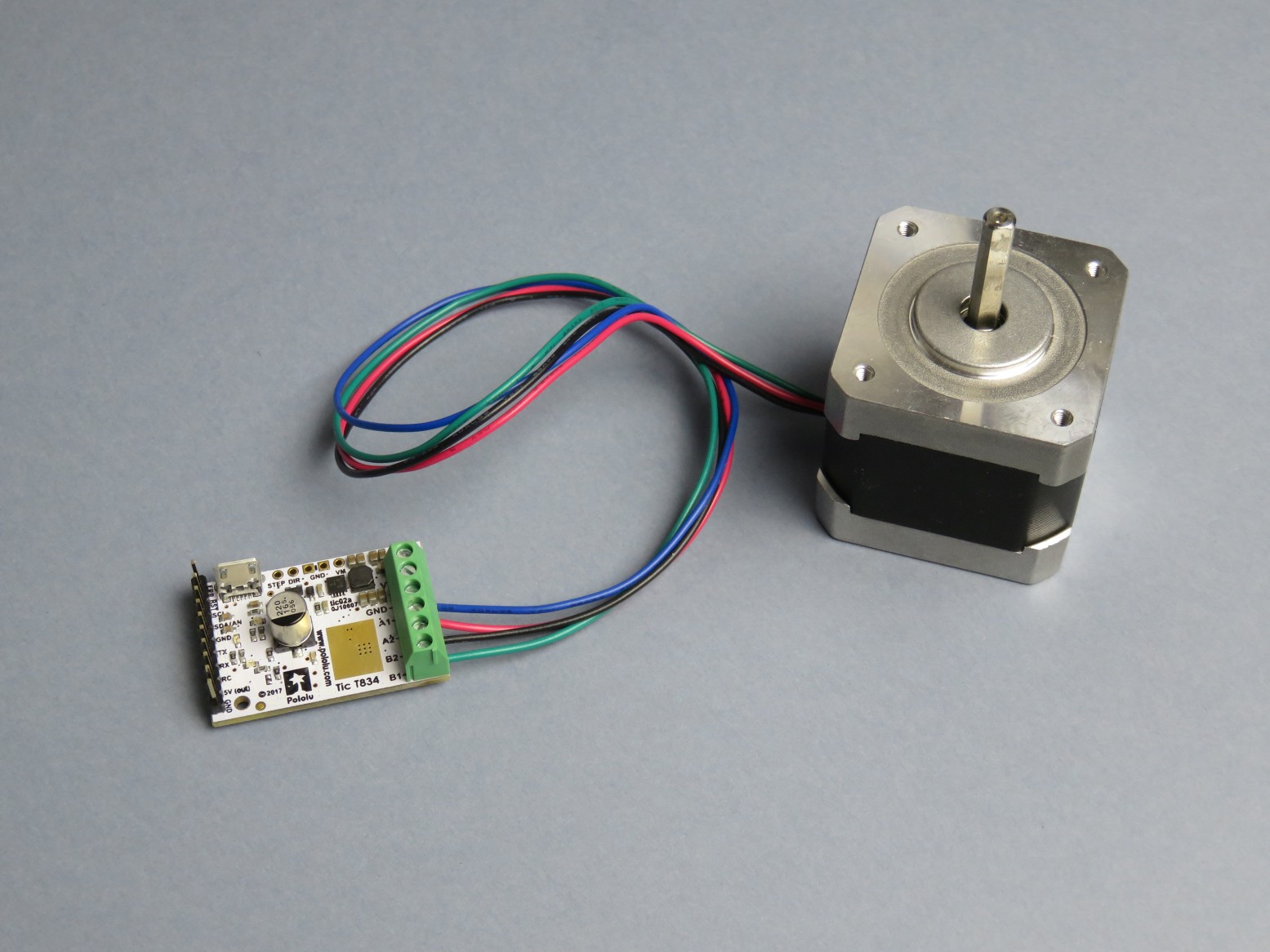
Rysunek 5.Silnik podłączony do sterownika Tic T834
Do sterowania sterownikiem Tic T834 przy pomocy interfejsu USB wykorzystano aplikację przygotowaną przez producenta – Tic Stepper Motor Controller Można ją pobrać ze strony Pololu. Dostępne jest oprogramowanie na systemy Linux, Windows oraz macOS. Po pobraniu oprogramowaniu należy je zainstalować. Proces instalacji przebiega standardowo.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



