





[PRZYKŁAD] Sterownik silnika krokowego Tic T834 – sterowanie przy wykorzystaniu USB
Następnie należy uruchomić program Tic Control Center. Pojawia się następujące okno.
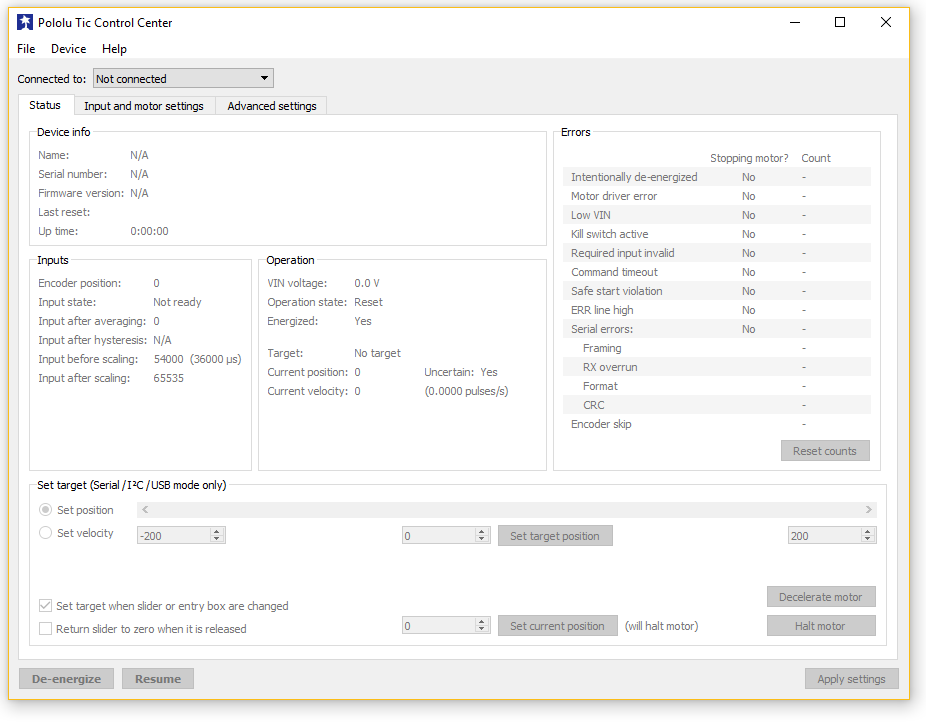 Rysunek 6. Okno programu Pololu Tic Control Center
Rysunek 6. Okno programu Pololu Tic Control Center
Pierwszym krokiem jest podłączenie sterownika do komputera przy pomocy przewodu microUSB <> USB. Na rozwijanej liście po napisie Connected to powinien pojawić się numer sterownika (czerwona ramka – rysunek 7). Program automatycznie nawiąże połączenie ze sterownikiem.
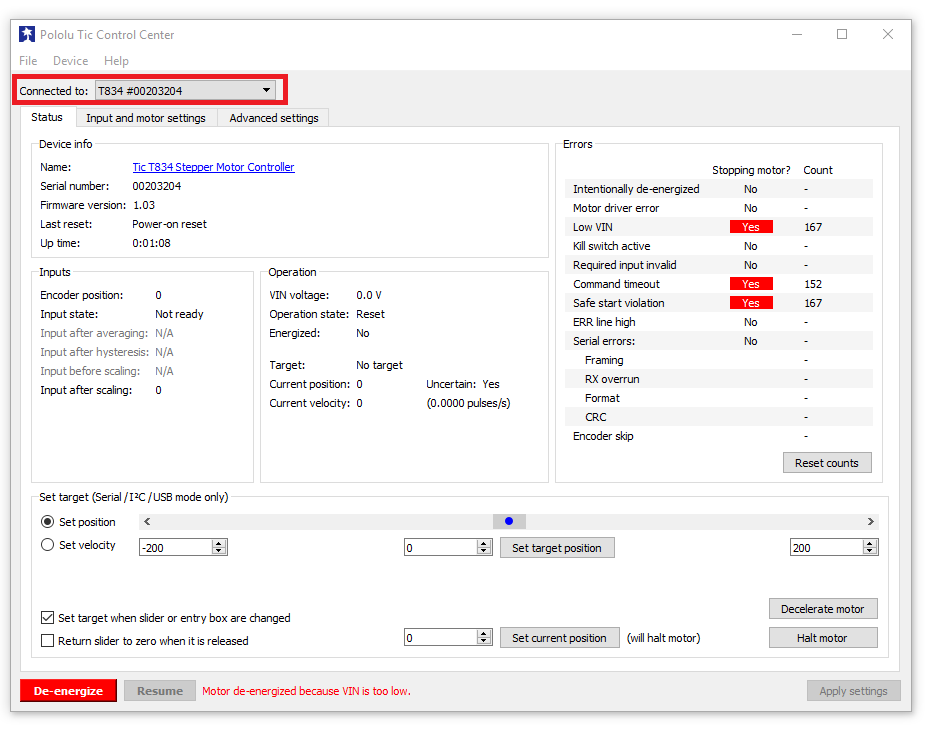 Rysunek 7. Podłączenie sterownika do komputera
Rysunek 7. Podłączenie sterownika do komputera
W programie są 3 zakładki:
- Status
- Input and motor settings
- Advanced settings
W zakładce Status (rysunek 7) znajdują się podstawowe informacje (sekcja Device info) o sterowniku takie jak numer seryjny czy wersja oprogramowania. Oprogramowanie sterownika można zaktualizować wybierając z górnej belki Device >> Upgrade firmware. W sekcji Inputs można znaleźć informacje o sygnałach wejściowych, które trafiają do sterownika (np. pozycji enkodera kwadraturowego). W sekcji Operation znajdują się informacje o napięciu zasilania silnika, aktualnej pozycji oraz aktualnej prędkości pracy silnika. Sekcja Errors zawiera informacje o błędach wykrytych przez sterownik np. zbyt niskim napięciu zasilania, błędach w komunikacji itd. W sekcji Set target można sterować ręcznie pracą silnika krokowego (wrócę do tej sekcji w dalszej części artykułu).
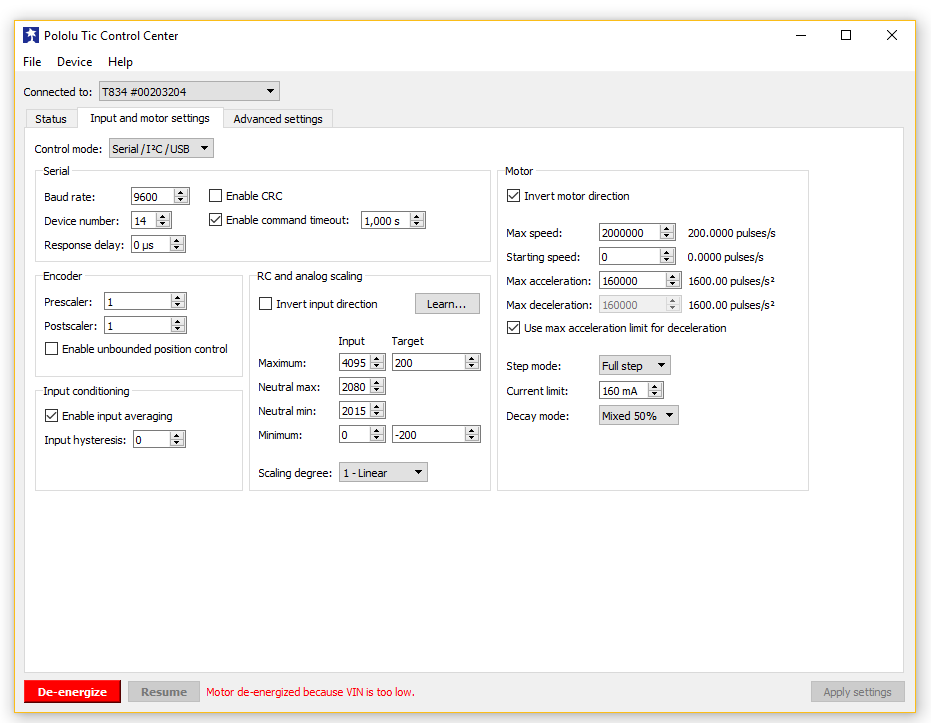 Rysunek 8. Zakładka Input and motor settings
Rysunek 8. Zakładka Input and motor settings
W zakładce Input and motor settings można wybrać sposób kontroli przy pomocy sterownika (ja zostawiłem opcję Serial/I2C/USB). Znajdują się tutaj ustawienia dotyczące sterowania przy pomocy portu szeregowego/USB (sekcja Serial). W sekcji Encoder można ustawić preskaler dla enkodera (jeżeli jest wykorzystywany), parametry sygnałów RC lub analogowych (sekcja RC and analog scaling) oraz, w sekcji Motor, zmienić parametry maksymalnej prędkości, przyspieszenia i wartości mikrokroku, którym będzie sterowany silnik krokowy.
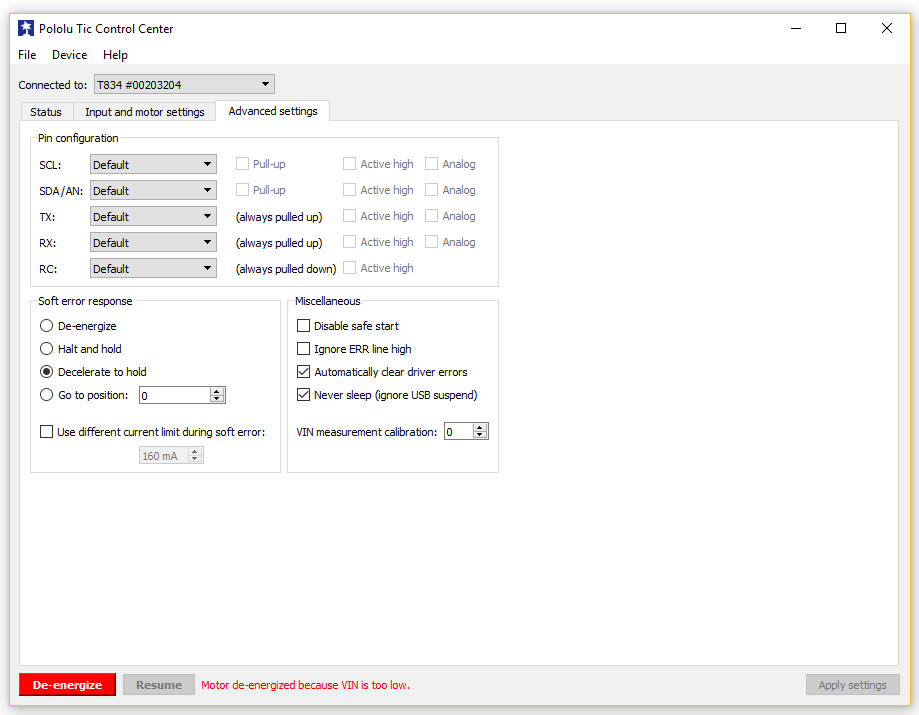 Rysunek 9. Zakładka Advanced settings
Rysunek 9. Zakładka Advanced settings
W ostatniej zakładce, Advanced settings, można ustawić alternatywne role dla pinów wejściowych sterownika (sekcja Pin Configuration) oraz sposób reagowania na błędy sterownika (sekcja Soft Error responce). W sekcji Miscellaneous można znaleźć inne ustawienia dla sterownika.
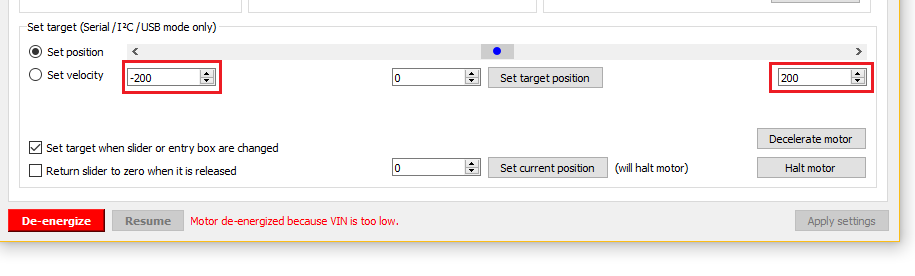 Rysunek 10. Zakładka Status – sekcja Set Target – set position
Rysunek 10. Zakładka Status – sekcja Set Target – set position
Teraz wrócę do zakładki Status i sekcji Set Target, gdzie znajdują się dwa tryby sterowania ręcznego, sterowanie pozycją (set position), gdzie można określić skrajne pozycje (czerwone prostokąty) wyrażone w krokach. W trybie pełnego kroku jeden obrót wału silnika to 200 kroków. Jeżeli natomiast zastosowane są mikrokroki 1/32, silnik do jednego obrotu będzie potrzebował aż 6400 kroków.
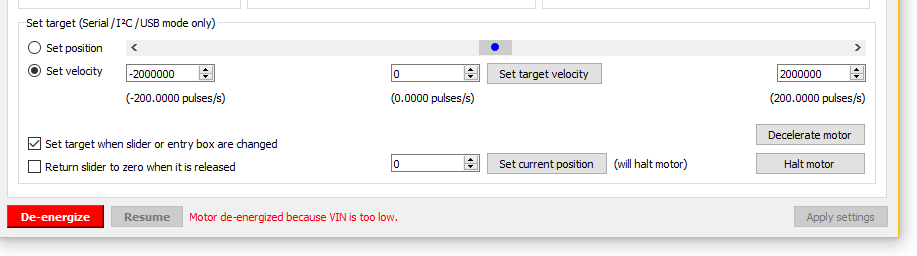
Rysunek 11. Zakładka Status – sekcja Set Target – Set velocity
Poniżej znajduje się opcja Set velocity, gdzie można zadać silnikowi określoną prędkość (wyrażoną w ilości kroków na sekundę). Podobnie tutaj można ustawić prędkość za pomocą suwaka lub wpisać wartość ręcznie, w oknie przy przycisku Set target velocity.
Poniżej znajduje się opcja Set target when slider entry box are changed – oznaczenie jej spowoduje zmianę pozycji/prędkości, gdy wartość w oknie ulegnie zmianie. Natomiast zaznaczenie opcji Return slider to zero when it is released sprawi że gdy puścimy suwak, wróci on do pozycji zerowej (neutralnej) lub zatrzyma się.
Sterowanie silnikiem krokowym z użyciem sterownika przy pomocy aplikacji Pololu Tic Control Center zostało przedstawione w filmiku poniżej:
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



