





LIDAR w projektowaniu systemów autonomicznych: Klasyfikacja i detekcja obiektu
Autonomiczny świat jutra nie wydaje się już być mrzonką. Obecnie pytania dotyczące systemów autonomicznych koncentrują się na technologiach i postępach niezbędnych do jej urzeczywistnienia. Technologia LIDAR, czyli określanie odległości za pomocą promieni świetlnych, stała się jedną z najpopularniejszych technologii umożliwiających rozwój systemów autonomicznych. Wciąż jednak pozostawia wiele pytań. Systemy LIDAR o zasięgu większym niż 100 m i rozdzielczości kątowej 0,1° nadal dominują wiadomości poświęcone technologii jazdy autonomicznej. Jednak są aplikacje, które nie wymagają aż takiego poziomu wydajności, na przykład asystent parkowania samochodu i autonomiczne sprzątanie ulic.
Istnieje wiele technologii pomiaru odległości, na przykład detekcja radiowa (radar), stereoskopia, pomiar ultradźwiękowy oraz LIDAR. Każdy z tych typów czujników charakteryzuje się różnymi parametrami, rozmiarem i kosztem. Dla przykładu, sensory ultradźwiękowe są najtańsze, ale mają ograniczony zasięg, rozdzielczość i niezawodność. Radar ma znacznie lepszy zasięg i niezawodność, ale ma również ograniczenia rozdzielczości kątowej. Natomiast widzenie stereoskopowe może mieć duży narzut obliczeniowy i ograniczenia dokładności, jeśli nie zostanie odpowiednio skalibrowane. Przemyślana konstrukcja systemu LIDAR pomaga wypełnić te luki dzięki precyzyjnemu pomiarowi głębokości, wysokiej rozdzielczości kątowej i przetwarzaniu o niskiej złożoności, nawet przy dużych odległościach. Systemy LIDAR są jednak zwykle postrzegane jako nieporęczne i kosztowne, co niekoniecznie musi być prawdą.
Projektowanie systemów LIDAR
Projekt systemu LIDAR rozpoczyna się od określenia najmniejszego obiektu, który system musi wykryć, współczynnika odbicia tego obiektu, a także odległości, w jakiej ma znajdować się ten obiekt. W ten sposób można zdefiniować rozdzielczość kątową systemu i na tej podstawie obliczyć minimalny stosunek sygnału do szumu (SNR), który stanowi rzeczywisty próg wykrywalności obiektów.
Zrozumienie specyfiki środowiska, w którym ma dojść do detekcji oraz uzyskanie niezbędnej wiedzy jest konieczne do dokonania odpowiednich kompromisów projektowych. Umożliwia opracowanie optymalnego rozwiązania pod względem kosztów i wydajności. Na przykład inaczej będziemy rozważać autonomiczny samochód poruszający się po drodze z prędkością 100 km/h (~62 mph) i autonomicznego robota poruszającego się po chodniku lub magazynie z prędkością 6 km/h.
W przypadku dużych prędkości istotne może być uwzględnienie nie tylko samego pojazdu poruszającego się z prędkością 100 km/h. Należy także uwzględnić inny pojazd poruszający się z tą samą prędkością w przeciwnym kierunku. Dla systemu oznacza to zbliżanie się obiektu z względną prędkością 200 km/h. W przypadku czujnika LIDAR, który wykrywa obiekty w maksymalnej odległości 200 m, pojazdy zmniejszyłyby odległość między sobą o 25% zakresu pomiarowego w zaledwie jedną sekundę. Należy podkreślić, że prędkość pojazdu, droga hamowania i dynamika związane z wykonywaniem manewrów to zadania unikalne dla każdej sytuacji. Ogólnie można stwierdzić, że w przypadku dużych prędkości potrzebne są systemy LIDAR o dalszym zasięgu.
Rozdzielczość kątowa
Rozdzielczość jest kolejną ważną cechą systemów LIDAR. Wysoka rozdzielczość kątowa umożliwia odbieranie w sygnale zwrotnym wielu pikseli z jednego obiektu. Jak pokazano na rysunku 1, rozdzielczość kątowa 1° przy odległości 200 m przekłada się na piksele o rozmiarze 3,5 m. Piksele tych rozmiarów są większe niż wiele obiektów, które należy wykryć, co stwarza kilka problemów.
Po pierwsze, często wykorzystuje się uśrednianie przestrzenne w celu poprawy SNR i wykrywalności. Nie jest to jednak możliwe jeśli obiekt reprezentowany jest przez tylko jeden piksel. Ponadto, nawet jeśli obiekt zostanie wykryty, niemożliwe staje się przewidzenie jego wielkości. Kamień na drodze, zwierzę, znak drogowy czy nawet motocykl są zwykle mniejsze niż 3,5 m. Z kolei system o rozdzielczości kątowej 0,1° ma 10 razy mniejsze piksele i powinien mierzyć około pięciu sąsiadujących segmentów w przypadku samochodu o średniej szerokości znajdującego się w odległości 200 m. Samochody mają zazwyczaj większy rozmiar wszerz niż wzwyż; w ten sposób system ten z dużym prawdopodobieństwem odróżni samochód od motocykla.
Wykrywanie, czy nad obiektem można bezpiecznie przejechać, wymaga znacznie większej dokładności w pionie niż w poziomie. Wyobraźmy sobie teraz, jak skrajnie inne będą wymagania dla autonomicznego odkurzacza, ponieważ porusza się on powoli i musi wykrywać wąskie, ale wysokie obiekty, takie jak nogi stołu.
 Rysunek 1. System LIDAR z 32 kanałami pionowymi skanujący otoczenie w poziomie z rozdzielczością kątową 1°
Rysunek 1. System LIDAR z 32 kanałami pionowymi skanujący otoczenie w poziomie z rozdzielczością kątową 1°
Elementy Analog Devices przeznaczone do systemów LIDAR
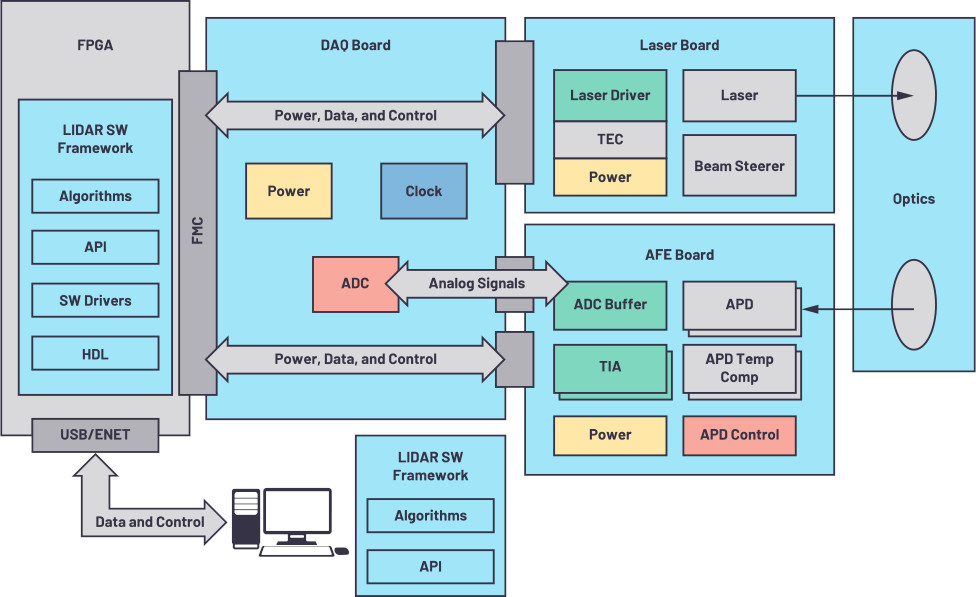
Po zdefiniowaniu odległości i prędkości poruszania się, a także ustaleniu wymagań odnośnie typu wykrywanych obiektów i wynikających z nich parametrów układu, można określić architekturę projektu systemu LIDAR. Konieczne będzie dokonanie wielu wyborów, takich jak skanowanie czy flashowanie bądź też technologia ToF czy też digitalizacja przebiegu. Opis wad i zalet poszczególnych rozwiązań wykracza jednak poza zakres tego artykułu. Bez względu na wybraną architekturę, bogata oferta wysokiej jakości elementów toru sygnałowego i komponentów do zarządzania zasilaniem z oferty Analog Devices, oznaczonych na niebiesko (patrz rysunek 2), zapewni wszystkie elementy niezbędne do zaprojektowania systemów o różnych rozmiarach i cenach.
 Rysunek 2. Elementy systemu LIDAR
Rysunek 2. Elementy systemu LIDAR
AD-FMCLIDAR1-EB to wysokowydajna platforma prototypowa dla systemów LIDAR z czujnikiem typu ToF i pulsacyjnie pracującym laserem o długości fali 905 nm. System ten umożliwia szybkie projektowanie prototypów rozwiązań dla robotyki, dronów, sprzętu rolniczego i budowlanego, a także samochodowych systemów ADAS/AV w konfiguracji jednowymiarowej nieskanującej (Flash LIDAR). Komponenty wybrane do tego projektu przeznaczone są do aplikacji LIDAR wymagających dalekich zasięgów i pulsacyjnej pracy lasera. System został zaprojektowany ze źródłem laserowym o długości fali 905 nm, pracującym w trybie pulsacyjnym, sterowanym przez szybki, podwójny tranzystor MOSFET ADP363 na prąd 4 A. Zawiera również 16-kanałową matrycę APD firmy First Sensor zasilaną przez programowalny zasilacz LT8331. Wykorzystano też 4-kanałowe wzmacniacze transimpedancyjne LTC6561 ze względu na ich niski poziom szumów i wysoką przepustowość, a także 8-bitowy przetwornik analogowo-cyfrowy AD9094 o częstotliwości próbkowania 1 Gsps, którego pobór mocy wynosi jedynie 435 mW/kanał.
W LIDARach nadal konieczne będzie zwiększanie szerokości pasma i częstotliwości próbkowania. Umożliwi to ogólne zwiększenie liczby klatek na sekundę i poprawę precyzji. Jednocześnie ważna jest minimalizacja zużycia energii, ponieważ mniejsze wydzielanie ciepła upraszcza konstrukcję termiczną i mechaniczną oraz umożliwia zmniejszenie rozmiarów urządzenia.
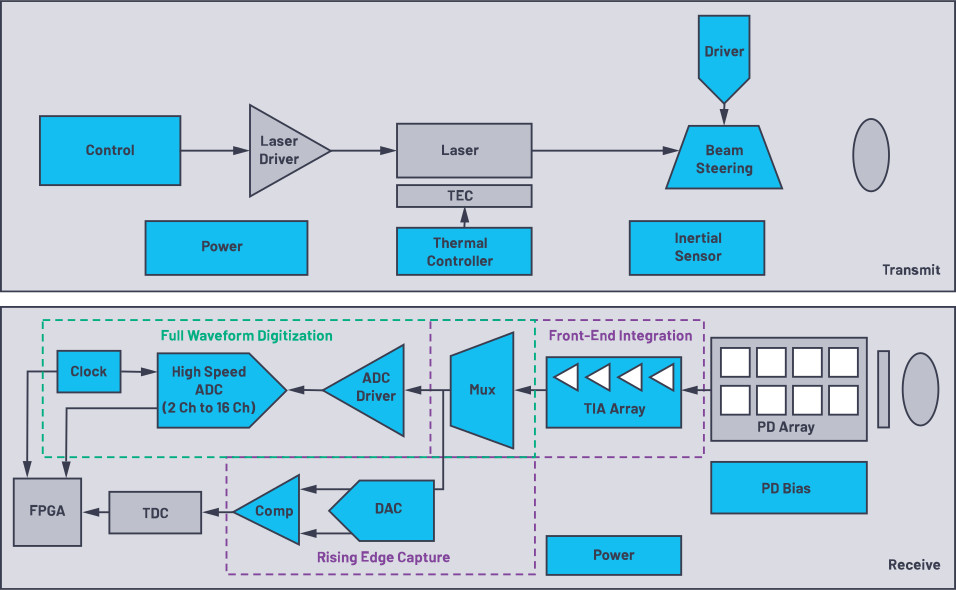
 Rysunek 3. Architektura systemu referencyjnego LIDAR Analog Devices AD-FMCLIDAR1-EBZ
Rysunek 3. Architektura systemu referencyjnego LIDAR Analog Devices AD-FMCLIDAR1-EBZ
Precyzja pomiaru związana z przetwornikiem ADC
Precyzja pomiaru odległości związana jest z częstotliwością próbkowania przetwornika ADC. Pozwala ona systemowi na uzyskanie dokładnych informacji o tym jak daleko znajduje się obiekt, co może mieć krytyczne znaczenie w przypadkach, które wymagają przemieszczania się na nieduże odległości, takich jak parkowanie czy logistyka magazynowa. Ponadto zmiana odległości od obiektu w czasie można wykorzystać do obliczenia prędkości, a takie zastosowanie często wymaga jeszcze większej precyzji.
Dzięki prostym algorytmom progowania (ang. thresholding), na przykład bezpośredniemu ToF, możliwe jest osiągnięcie dokładności na poziomie 15 cm dla okresu próbkowania 1 ns – czyli dla częstotliwości próbkowania konwertera analogowo-cyfrowego na poziomie 1 Gsps. Oblicza się ją jako c(dt/2), gdzie c to prędkość światła, a dt to okres próbkowania konwertera analogowo-cyfrowego. Skoro jednak użyto przetwornika ADC, to w celu poprawy precyzji można skorzystać z bardziej wyrafinowanych technik, takich jak interpolacja. Można ją zwiększyć mniej więcej o wartość pierwiastka kwadratowego z SNR. Jednym z najbardziej wydajnych algorytmów przetwarzania danych jest tzw. filtr dopasowany. Maksymalizuje on SNR, a następnie wykorzystuje interpolację w celu uzyskania jak najlepszej precyzji.
Zestaw ewaluacyjny EVAL-ADAL6110-16
Kolejnym narzędziem wspomagającym projektowanie systemów LIDAR jest wysoce konfigurowalny zestaw ewaluacyjny EVAL-ADAL6110-16. Zawiera on uproszczony, ale konfigurowalny dwuwymiarowy czujnik LIDAR do zastosowań wymagających wykrywania lub śledzenia obiektów w czasie rzeczywistym (65 Hz), takich jak unikanie kolizji, monitorowanie wysokości czy miękkie lądowanie.
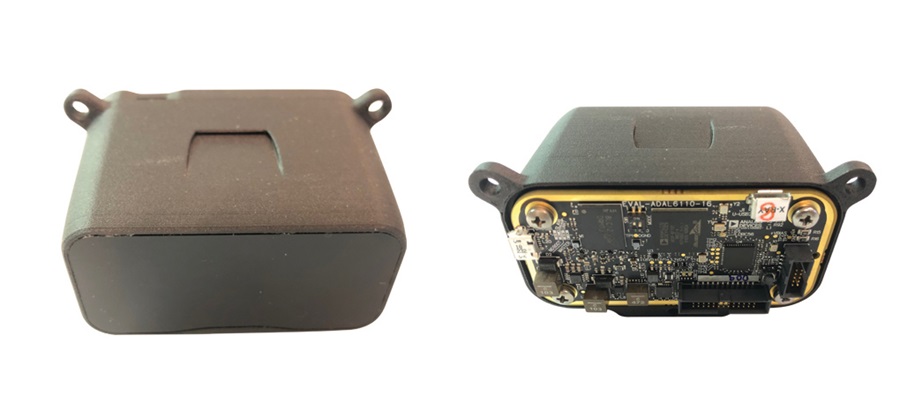 Rysunek 4. Moduł ewaluacyjny EVAL-ADAL6110-16 LIDAR wykorzystujący zintegrowany 16-kanałowy układ ADAL6110-16
Rysunek 4. Moduł ewaluacyjny EVAL-ADAL6110-16 LIDAR wykorzystujący zintegrowany 16-kanałowy układ ADAL6110-16
Optyka zastosowana w tym projekcie referencyjnym zapewnia pole widzenia (FOV) 37° w poziomie oraz 5,7° w pionie. Przy liniowej matrycy 16 pikseli zorientowanej poziomo, rozmiar piksela przy odległości od obiektu 20 m jest porównywalny z rozmiarem przeciętnego dorosłego: 0,8 m (szerokość) × 2 m (wysokość). Jak stwierdzono wcześniej, różne aplikacje mogą wymagać różnych konfiguracji optycznych. Jeśli istniejąca optyka nie spełnia wymagań aplikacji, płytkę drukowaną można łatwo wyjąć z obudowy i włączyć do innej konfiguracji optycznej.
Procesor LSP ADAL6110-16
System ewaluacyjny oparty jest na układzie ADAL6110-16, który jest 16-kanałowym zintegrowanym procesorem sygnałowym LIDAR (w skrócie LSP) o niskim poborze mocy. Urządzenie zapewnia kontrolę czasu oświetlenia pola będącego przedmiotem zainteresowania, synchronizację próbkowania odebranego przebiegu oraz możliwość jego digitalizacji. Integracja wrażliwych układów analogowych w ADAL6110-16 zmniejsza poziom szumów. Umożliwia to systemowi przechwytywanie bardzo niskich wartości sygnału, w przeciwieństwie do implementacji tego samego toru sygnałowego z odrębnymi komponentami o podobnych parametrach projektowych, gdzie moc szumu może zdominować cały projekt. Ponadto zintegrowany tor sygnałowy umożliwia zmniejszenie rozmiaru i wagi systemów LIDAR, a także zużycia energii.
Oprogramowanie systemu zapewnia szybkie osiągnięcie gotowości do wykonywania pomiarów i odczytu odległości od obiektu. Sam system jest w pełni samodzielny i działa z jednego źródła zasilania 5 V poprzez port USB. Można go łatwo zintegrować z autonomicznym systemem za pomocą dostarczonych sterowników dla robotycznego systemu operacyjnego (ROS). Użytkownicy muszą tylko utworzyć odpowiednią przejściówkę, aby połączyć się ze swoim robotem lub pojazdem i komunikować za pośrednictwem jednego z czterech dostępnych interfejsów komunikacyjnych: SPI, USB, CAN lub RS-232. Projekt referencyjny można również zmodyfikować pod kątem różnych technologii odbiorników i nadajników. Więcej informacji na temat urządzeń LSP EVAL-ADAL6110-16 i ADAL6110-16 można znaleźć na stronie analog.com/LIDAR.
Konfiguracja zestawu EVAL-ADAL6110-16
Jak wspomniano wcześniej, można zmieniać technologię odbiornika projektu referencyjnego EVAL-ADAL6110-16 tworząc przeróżne konfiguracje, jak pokazano na rysunkach 5-7. EVAL-ADAL6110-16 dostarczany jest z 16-elementową matrycą fotodiod Hamamatsu S8558. Rozmiar piksela przy różnych odległościach przedstawiono w tabeli 1. Oparto go o efektywny rozmiar piksela wynoszący 0,8 mm × 2 mm w połączeniu z obiektywem o ogniskowej 20 mm. Gdyby ta sama płytka została zmodyfikowana i wykorzystywała inne fotodiody, takie jak Osram SFH-2701 z aktywnym obszarem 0,6 x 0,6 mm każda, rozmiar piksela w tych samych zakresach byłby zupełnie inny, ponieważ to od niego zależy pole widzenia (FOV).
Tabela 1. Rozmiar odbiornika i optyka zastosowana w EVAL-ADAL6110-16 oraz możliwy układ pikseli, jeśli odbiornik został zmieniony na SFH-2701
| Wymiar pikseli vs. zasięg dla projektu referencyjnego EVAL-ADAL6110-16 | |||||
| Optyczne FOV | Powód wyboru | 20 mm | 40 mm | 60 mm | |
| EVAL-ADAL6110-16 z Hamamatsu S8558 | 37° × 5.7° | Wykrycie człowieka z 20 m | 0.8 × 2 | 1.6 × 4 | 2.4 × 6 |
| EVAL-ADAL6110-16 z 16 pikselami Osram SFH-2701 | Zależy od ustawienia pikseli | Piksel rozmiaru dwóch 2-litrowych butelek w odl. 5 m | 0.6 × 0.6 | 1.2 × 1.2 | 1.8 × 1.8 |
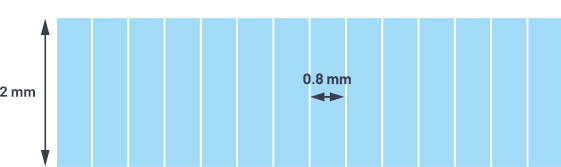 Rysunek 5. Wymiary układu tablicy fotodiod Hamamatsu S8558 PIN
Rysunek 5. Wymiary układu tablicy fotodiod Hamamatsu S8558 PIN
Po wybraniu obiektywu o ogniskowej 20 mm, pole widzenia na piksel można obliczyć za pomocą podstawowej trygonometrii (rysunek 6). Oczywiście wybór obiektywu może obejmować dodatkowe, bardziej złożone kwestie, takie jak korekcja aberracji i zakrzywienia pola widzenia. Jednak w przypadku systemów o niższej rozdzielczości, takich jak ten, proste obliczenia są często wystarczające.
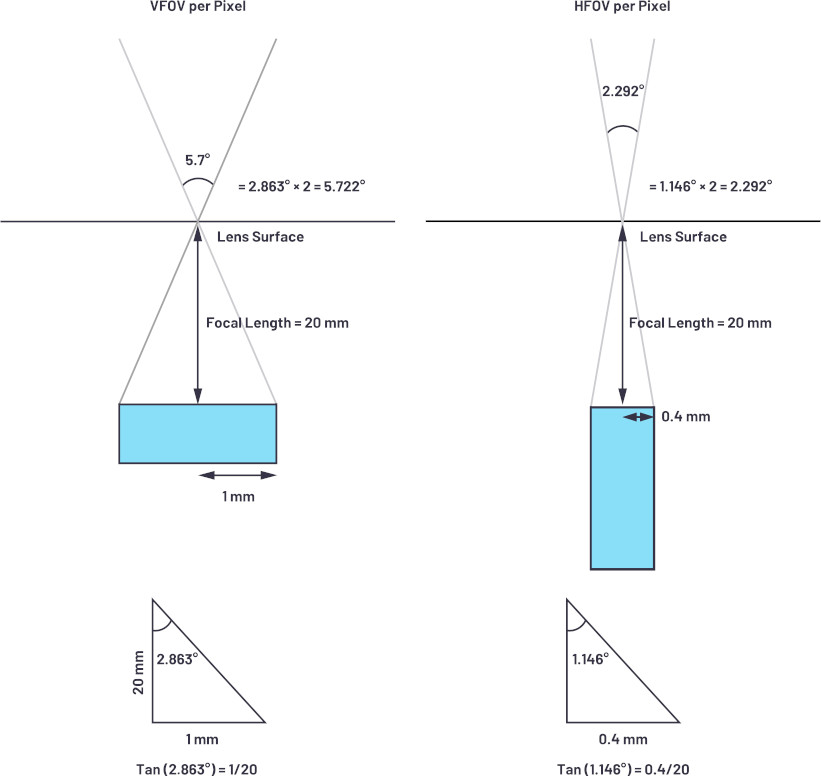 Rysunek 6. Podstawowe obliczenia rozdzielczości kątowej dla prostej optyki
Rysunek 6. Podstawowe obliczenia rozdzielczości kątowej dla prostej optyki
Przykłady aplikacji
Wybrane pole widzenia 1 × 16 pikseli może być używane do wykrywania obiektów i unikania kolizji w samochodach autonomicznych i bezzałogowych pojazdach naziemnych. Można ją także wykorzystać w celu umożliwienia jednoczesnej lokalizacji i mapowania (SLAM) robotom operującym w ograniczonych środowiskach, takich jak magazyny.
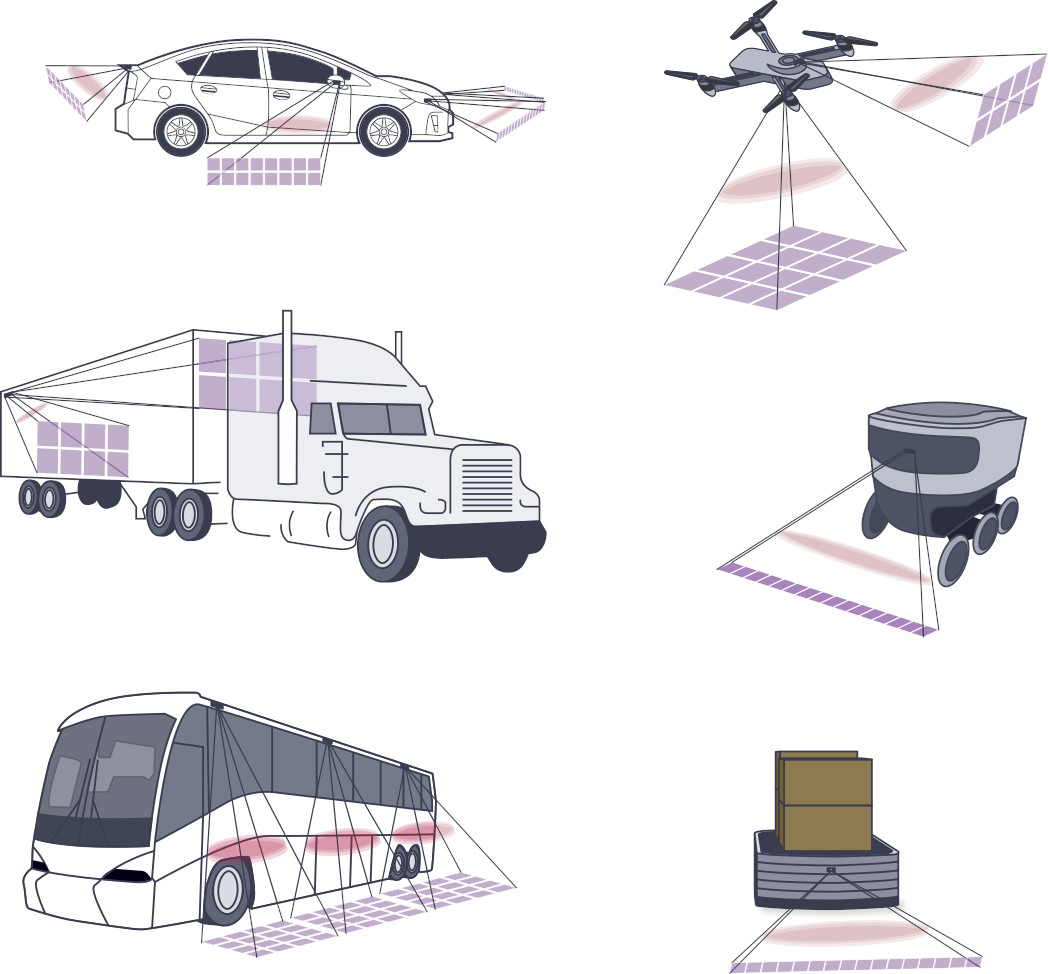 Rysunek 7. Różne implementacje optyczne systemu LIDAR, które mogą pomóc zwiększyć bezpieczeństwo działania urządzeń
Rysunek 7. Różne implementacje optyczne systemu LIDAR, które mogą pomóc zwiększyć bezpieczeństwo działania urządzeń
Jednym z ciekawszych zastosowań jest skonfigurowanie macierzy 4 × 4 w celu wykrywania obiektów naokoło środka systemu. Ta rozwijana już aplikacja zostanie zamontowana w autobusach i kamperach jako strefa bezpieczeństwa wokół pojazdu. Może ona ostrzec kierowcę, jeśli w pobliżu autobusu znajdą się nieostrożne osoby. System mógłby wykrywać kierunek, w którym idzie dana osoba i ostrzegać kierowcę, aby działał zatrzymując pojazd lub ostrzegając pieszego klaksonem, zapobiegając uderzeniu osoby lub rowerzysty.
Podsumowanie
Pamiętajmy, że nie każde zastosowanie wymaga rozdzielczości kątowej 0,1° i zasięgu 100 m. Warto poświęcić trochę czasu na rozważenie, czego dana aplikacja naprawdę potrzebuje od systemu LIDAR, a następnie jasno zdefiniować kluczowe kryteria, takie jak rozmiar wykrywanego obiektu, współczynnik odbicia, odległość od obiektu i prędkość, z jaką porusza się projektowany system autonomiczny. Pozwoli to na zrównoważony dobór komponentów o optymalnej wydajności i koszcie w stosunku do funkcjonalności wymaganej przez system. Zwiększa to ostatecznie prawdopodobieństwo udanego projektu już od pierwszej próby.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




