





Jak wytłumić światło otoczenia w odbiornikach LIDAR
Jednym z trudniejszych wyzwań dla LIDARów z czujnikiem ToF (time-of-flight) jest wysoka czułość wymagana od układu odbiorczego. Skolimowany (czyli o równoległych promieniach światła) impuls laserowy zazwyczaj jest wysyłany w określone miejsce. Zaletą skolimowanego źródła laserowego jest to, że ogranicza utratę światła w wyniku dywergencji i utrzymuje stałą wielkość plamki. Jednak gdy światło uderzy w obiekt, rozprasza się i odbija w wielu kierunkach. Ilość światła odbitego z powrotem do źródła jest proporcjonalna do 1/R2, co nazywamy również prawem odwrotnych kwadratów. Na krótkich dystansach wykrycie obiektu nie jest trudne. Jednak przy wykrywaniu obiektów w odległości powyżej 100 metrów potrzeba dużego wzmocnienia, aby wykryć choć niewielką ilość odbitego światła.
Jedną z konsekwencji zastosowania wysokich wzmocnień w odbiorniku jest znaczny wpływ światła otoczenia na układ przetwarzania sygnału. Słońce jest bowiem źródłem światła o szerokim spektrum długości fal. Systemy LIDAR zazwyczaj pracują na długościach fal 900 nm i 1550 nm ze względu na najmniejsze natężenia w widmie światła słonecznego. Niestety przy wykrywaniu odległych obiektów potrzebujemy również znacznego wzmocnienia w odbiorniku, a wtedy nawet na tych długościach fali światło słoneczne może przesterować wzmacniacz. Skutecznie „oślepia” to system i czyni go bezużytecznym. W niniejszym artykule omówimy rozwiązania dotyczące łagodzenia wpływu światła otoczenia na układy odbiorcze LIDAR.
Podstawy
Zasada działania czujników ToF jest następująca – laser wysyła wąski impuls światła. Ten impuls laserowy trafia w cel, a światło odbija się od obiektu. Detektor służy do pomiaru czasu powrotu sygnału odbiciowego. Znając prędkość światła i czas okrążenia impulsu laserowego, można obliczyć odległość. Ogólnie rzecz biorąc, im wyższa amplituda lasera impulsowego, tym silniejszy będzie sygnał powrotny. W przypadku LIDARu dalekiego zasięgu, ograniczeniem zakresu działania nowoczesnych systemów są standardy mocy zapobiegające wpływowi lasera na uszkodzenia wzroku. Powierzchnia obszaru pod wykresem wyznacza energię impulsu, co pokazano na rysunku 1.
Przechodząc do wyższej mocy szczytowej, należy zmniejszyć szerokość tego impulsu, aby utrzymać obszar pod krzywą poniżej granicy bezpieczeństwa dla oczu. Dlatego naszym celem jest dostarczenie impulsu laserowego o wysokiej amplitudzie i stosunkowo wąskiej szerokości (krótkim czasie trwania). W obecnych systemach LIDAR szerokość impulsów jest rzędu 5 ns i staje się coraz krótsza. Innym aspektem, który należy wziąć pod uwagę w przypadku LIDARu, jest rozpraszanie. Zazwyczaj jako detektor stosuje się fotodiodę lawinową (ang. avalanche photodiode, w skrócie APD), co pozwala zapewnić wzmocnienie optyczne pozwalające skutecznie przezwyciężyć ograniczenia związane z prawem odwrotności kwadratów. APD są korzystne dla układu sygnałowego, ponieważ wzmacniacz transimpedancyjny (TIA) jest czynnikiem ograniczającym szum układu. Poprzez zastosowanie wzmocnienia w detektorze, szum wejściowy systemu jest redukowany. Należy pamiętać, że dioda APD ma ograniczenia polegające na tym, ze zbyt duże wzmocnienie powiększa szumy, doprowadzając do granicy wykrywalności obiektów.
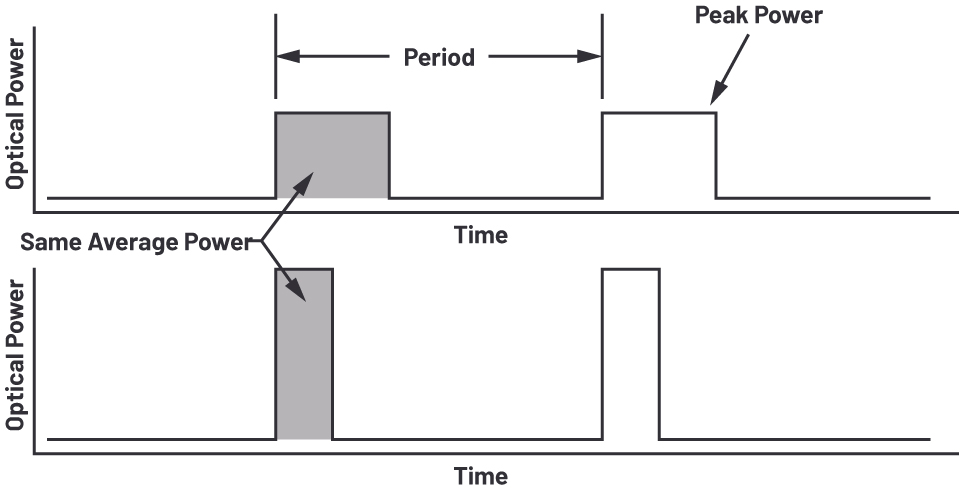 Rys. 1. Przykłady różnych szerokości impulsów na wyjściu lasera
Rys. 1. Przykłady różnych szerokości impulsów na wyjściu lasera
Wyzwania związane z LIDARem
Podobnie jak w przypadku innych problemów inżynieryjnych, konieczne tu są kompromisy. Układ odbioru sygnału musi mieć wystarczająco dużą przepustowość, aby wykryć krawędzie impulsów laserowych o szerokości ~5 ns. Natomiast pojemność detektora musi być mała, aby nie ograniczać przepustowości wzmacniacza TIA. Mniejsza pojemność pomaga również ograniczyć szum śrutowy diody APD, ponieważ są one do siebie proporcjonalne. Należy więc zbalansować czułość, przepustowość i moc zgodnie z wymaganiami konkretnej aplikacji.
Kolejnym wyzwaniem związanym z wyższymi wzmocnieniami w torze odbiorczym jest duży zakres dynamiki, który się z tym wiąże. Aby go osiągnąć, nowoczesne APD są spolaryzowane wstecznie na napięcie około 300 V. Problem staje się widoczny, gdy bardzo blisko detektora znajduje się obiekt o wysokim współczynniku odbicia. Ten duży sygnał połączony ze stosunkowo dużym wzmocnieniem APD może spowodować przepływ setek mA przez wzmacniacz TIA. Większość wzmacniaczy transimpedancyjnych nie jest zaprojektowana z myślą o takich prądach, nie mówiąc już o przywróceniu poprawnego działania systemu w krótkim czasie do następnego cyklu impulsu. Na szczęście, TIA przeznaczone dla systemów LIDAR mają wbudowane zaciski do bocznikowania prądu, co umożliwia odzyskanie stabilizacji w czasie poniżej 100 ns. Kwestia mocy jest rozwiązywana przez zmianę wypełnienia impulsu oraz wyłączanie nieużywanych kanałów. Mając to na uwadze, ostatnim dużym problemem są fotoprądy generowane przez światło otoczenia, a rozwiązanie go nie jest trywialne.
Wejście ze sprzężeniem stałoprądowym lub zmiennoprądowym
Na pierwszy rzut oka szybkim rozwiązaniem byłoby zmiennoprądowe (AC) sprzężenie wejść ze wzmacniaczem w celu zablokowania prądu stałego. Niestety, takie podejście wiąże się z wieloma pułapkami. Czas przywracania działania ze stanu nasycenia znacznie się wydłuży, „oślepiając” w tym czasie system. W przypadku dużego impulsu otrzymanego z blisko położonego obiektu, kondensator sprzęgający zostanie bowiem w pełni naładowany. Wzmacniacz TIA może oddać tylko niewielką ilość prądu do zacisków zmiennoprądowych, ponieważ rezystory sprzężenia zwrotnego, o wartości rzędu 10-100 kΩ ograniczają prąd. W zależności od wielkości kondensatora, stała czasowa RC może być bardzo duża, a stabilizacja układu może zająć setki μs. Jest to niedopuszczalne, ponieważ na detekcję z odległości 100 metrów mamy zazwyczaj ok. 2 μs i w ten sposób przeoczymy sygnał z dalszych obiektów.
Inną pułapką sprzężenia napięcia zmiennego ze wzmacniaczem TIA jest częstotliwość pulsowania źródła laserowego. Po nadejściu impulsów sprzężonych zmiennoprądowo, zostaną one uśrednione na zaciskach kondensatora. Sygnał z detektora jest dodatni, a więc będzie systematycznie ładował kondensator. Oczywiście oznacza to wytwarzanie na jego okładkach składowej stałej. To z kolei zmniejsza zakres pracy wzmacniacza TIA, podczas gdy składowa stała się zmienia i zależy od częstotliwości pulsowania oraz amplitudy sygnału powrotnego. Bardziej szczegółową analizę TIA ze sprzężeniem zmiennoprądowym można znaleźć w artykule „Jak skutecznie projektować i optymalizować interfejsy TIA w systemach LIDAR”.
Wejście ze sprzężeniem stałoprądowym pozwala uniknąć tych wszystkich niuansów i efektów, ale kosztem zwiększonej złożoności układu. Skuteczną metodą korekcji prądu jest dodanie pętli sprzężenia zwrotnego w celu podania przeciwnego prądu na wejście wzmacniacza TIA.
Obwód tłumiący prąd stały
Rysunek 2 przedstawia schemat blokowy analogowej pętli sprzężenia zwrotnego do korekcji stałych prądów wejściowych. Zadaniem wzmacniacza błędu jest obserwacja wyjścia wzmacniacza TIA i wprowadzanie na jego wejście przeciwnego prądu. Najlepiej jako odniesienia użyć napięcia na wzmacniaczu TIA. Są ku temu dwa powody: dobre dopasowanie punktu odniesienia wyjścia i zapewnienie odpowiedniego tłumienia zakłóceń na linii zasilania (PSRR). Aby zaoszczędzić energię i koszty elementów, w obwodzie wzmacniacza błędu można zastosować układ o węższym paśmie. Na wejściu wzmacniacza błędu zaleca się umieścić filtr dolnoprzepustowy, ponieważ nie chcemy, aby krótkie impulsy trafiały z powrotem na wejście.
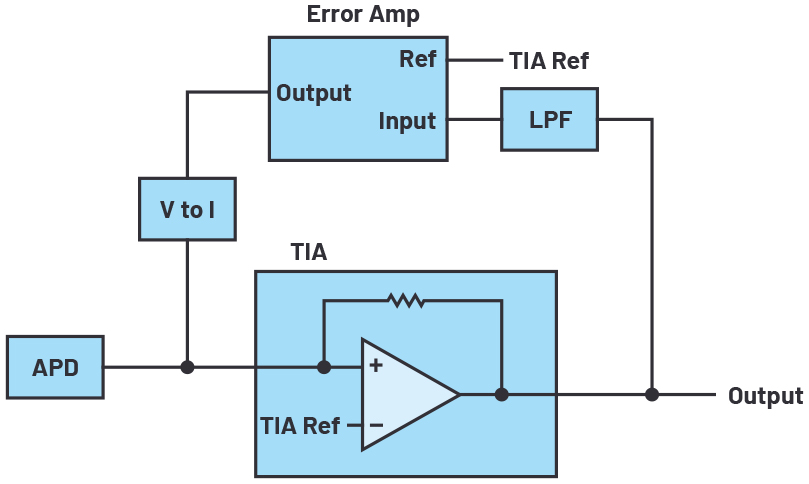 Rysunek 2. Schemat obwodu korekcji prądu stałego
Rysunek 2. Schemat obwodu korekcji prądu stałego
Rysunek 3 przedstawia obwód korygujący prąd stały wykorzystujący układ LTC6560. Normalnie, gdy żaden prąd nie wpływa do TIA, wyjście układu wynosi około 1 V DC. Dlatego, aby dopasować napięcie odniesienia, które wynosi ok. 1.5 V, należy zastosować dzielnik napięcia.
Elementy R1 i C1 tworzą filtr dolnoprzepustowy na częstotliwość około 10,6 kHz. Pomaga to zminimalizować ilość szumu wprowadzanego do układu LTC6560 ze wzmacniacza błędu. Filtr ten będzie dominującym biegunem dla pętli i może być dostosowany do różnych wymagań dotyczących przepustowości.
Prosty obwód całkującego wzmacniacza błędu służy do sterowania wyjściem LTC6560 na napięcie 1 V. Należy pamiętać, że 1 V to nominalne napięcie wyjściowe, gdy do LTC6560 nie trafia prąd wejściowy. Rezystor R2 (20 kΩ), to prosta implementacja konwersji napięcia wyjściowego LT6015 na prąd.
Wartość tego rezystora i maksymalny sygnał na wyjściu wzmacniacza operacyjnego określa maksymalny prąd obsługiwany przez układ. Ponieważ LT6015 nie jest wzmacniaczem operacyjnym typu rail-to-rail, to zakres korekcji prądu stałego będzie ograniczony do różnicy między maksymalnym napięciem wyjściowym LT6015, a napięciem polaryzacji LTC6560, które wynosi nominalnie 1,5 V. Daje to mniej więcej 3 V i oznacza maksymalny zakres korekcji prądów wynoszący 150 μA.
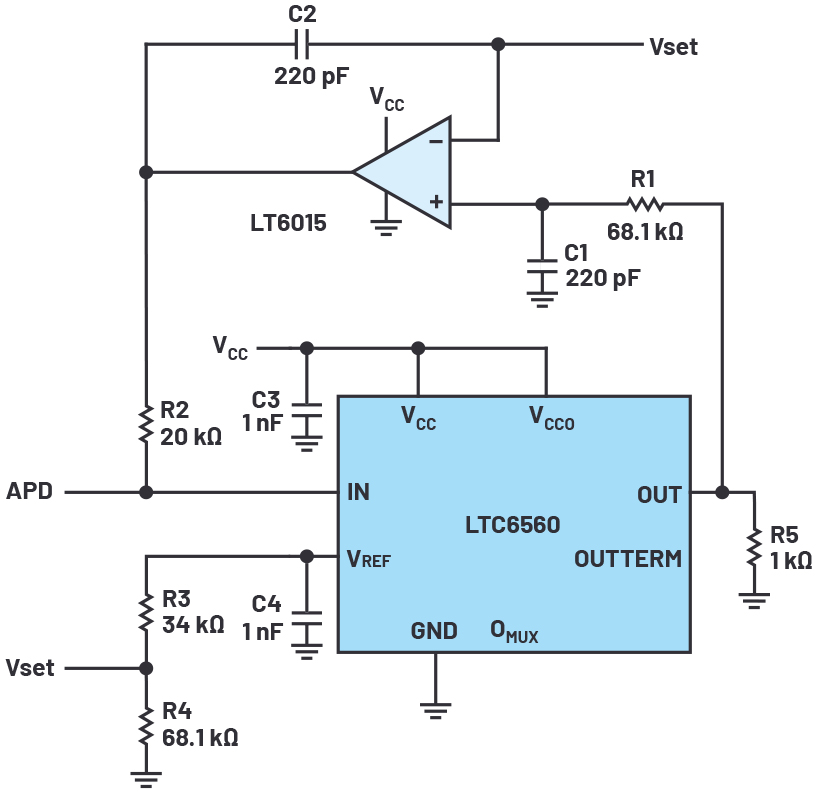 Rysunek 3. Obwód korygujący prąd stały dla układu LTC6560
Rysunek 3. Obwód korygujący prąd stały dla układu LTC6560
Symulacja w LTspice
Rysunki 4 i 5 przedstawiają symulację obwodu w programie LTspice. Warto zwrócić uwagę, że źródło V2 jest używane do ustalenia punktu odniesienia wzmacniacza błędu. Ma to na celu przede wszystkim przyspieszenie symulacji, szczególnie procesu ustalania napięcia początkowego.
Obwód korekcji prądu można również zaprojektować z układem LTC6561. Pozwala to oszczędzić trzy układy LT6015, używając w to miejsce jedynie czterech rezystorów wyjściowych do wstrzykiwania prądu do każdego kanału (rysunek 6). Należy zauważyć, że tworzymy w ten sposób ścieżkę, która może sprzęgać kanały. Jednak rezystancja 40 kΩ ma minimalny wpływ na izolację międzykanałową. Wreszcie, kanały powinny być bardzo podobne pod względem wartości stałych prądów wejściowych, ponieważ wzmacniacz błędu nie może pracować w drastycznie różnych warunkach dla różnych kanałów. Taki obwód daje sporo korzyści systemowi, w którym kanały optyczne fizycznie znajdują się blisko siebie.
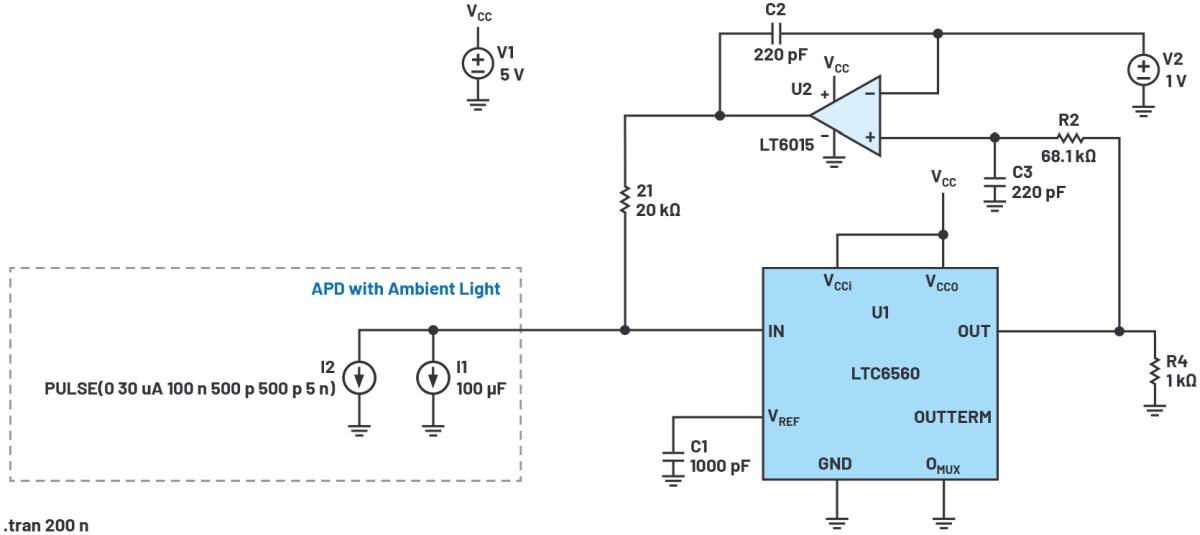 Rysunek 4. Schemat symulacji w LTspice
Rysunek 4. Schemat symulacji w LTspice
 Rysunek 5. Wykres sygnału wejściowego i wyjściowego korektora prądu stałego
Rysunek 5. Wykres sygnału wejściowego i wyjściowego korektora prądu stałego
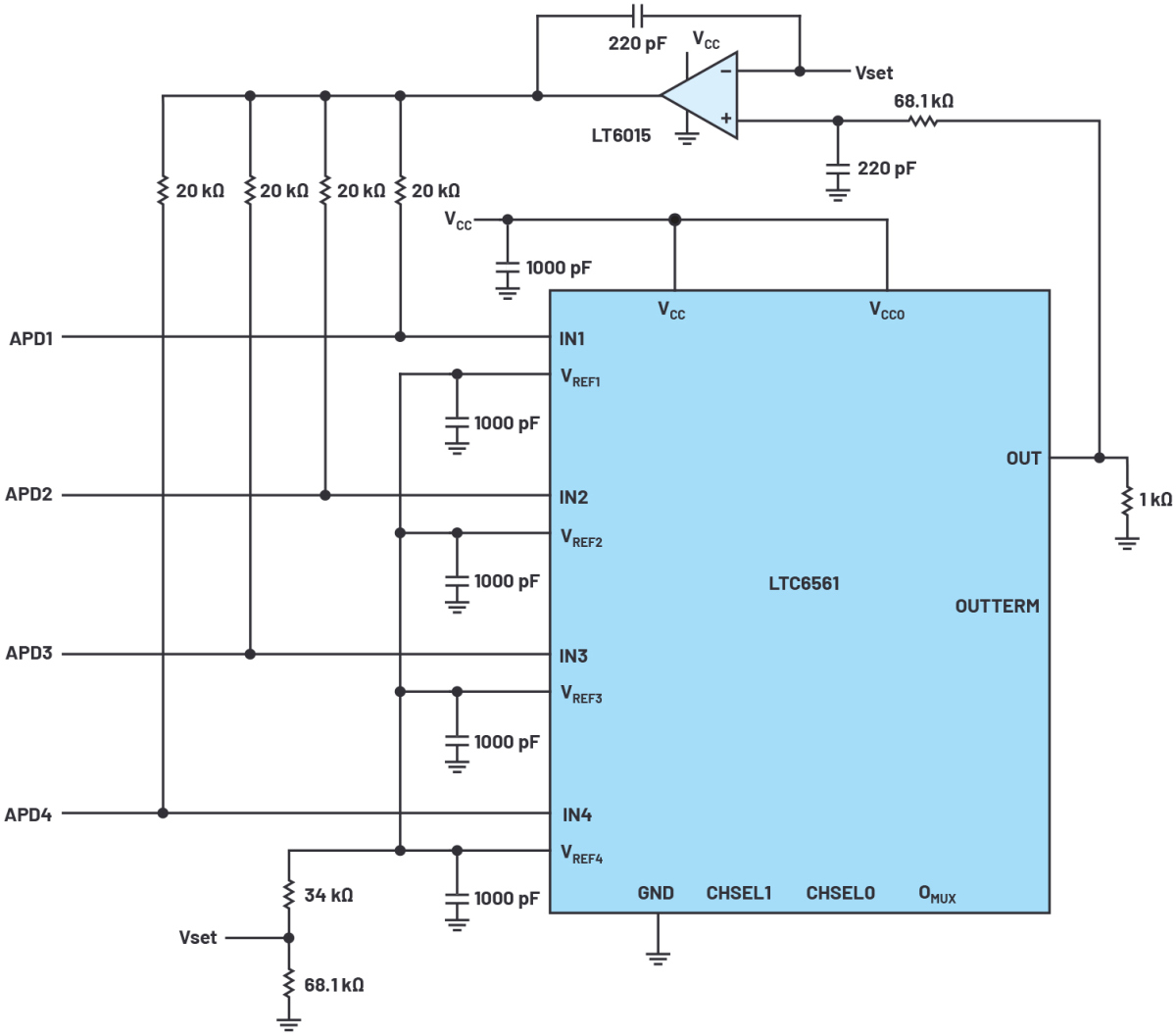 Rysunek 6. Układ korekcji prądu stałego z układem LTC6561
Rysunek 6. Układ korekcji prądu stałego z układem LTC6561
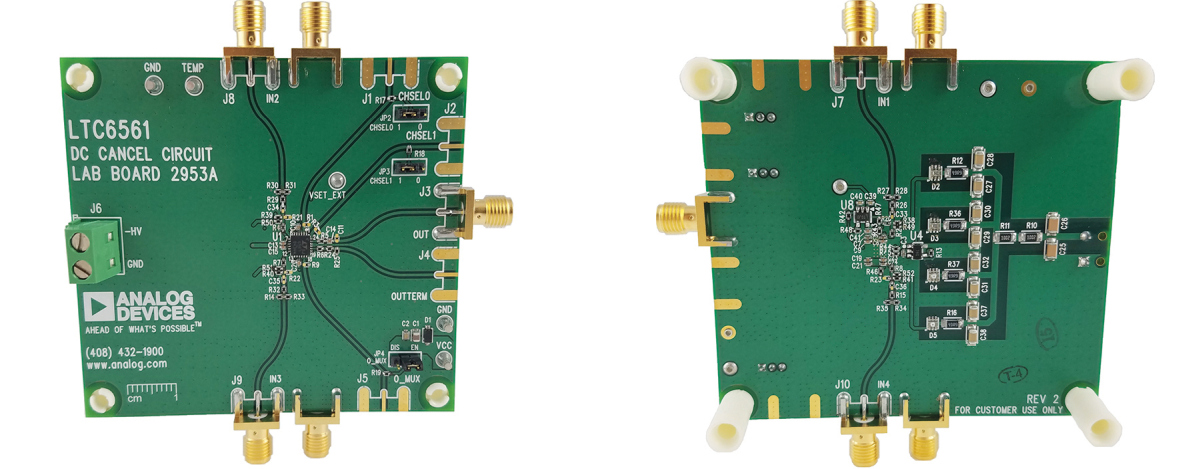 Rysunek 7. Płytka laboratoryjna LB2953A z układem korekcji prądu stałego
Rysunek 7. Płytka laboratoryjna LB2953A z układem korekcji prądu stałego
Wyniki
Aby artykuł był bardziej przekonujący i aby zweryfikować układ w rzeczywistości, wykonano płytkę koncepcyjną LB2953A. Można ją zobaczyć na rysunku 7. Zgodnie z oczekiwaniami, obwód tłumienia prądu stałego jest zdominowany przez pasożytnicze elementy ścieżek i komponentów płytki.
Pomiary wykazały niewielki wzrost poziomu szumów z 64 nA rms w układzie bez korekty do 66 nA rms dla włączonego układu korygującego ze sprzężeniem DC, w paśmie od 100 kHz do 200 MHz. Rysunek 8 przedstawia zmierzone gęstości szumów na wejściu z obwodem korygującym prąd stały i bez niego. Z obwodu usunięto fotodiody lawinowe, co pozwala zmierzyć poziom szumów bez obciążania pojemnościowego wzmacniacza TIA. Dało to szum o wartości 59 nA rms dla układu bez obwodu korygującego i 60 nA rms dla układu z obwodem korygującym prąd stały. Tym niemniej obwód jest oczywiście przeznaczony do użytku z detektorem i powinien uwzględniać pojemności występujące w tym układzie.
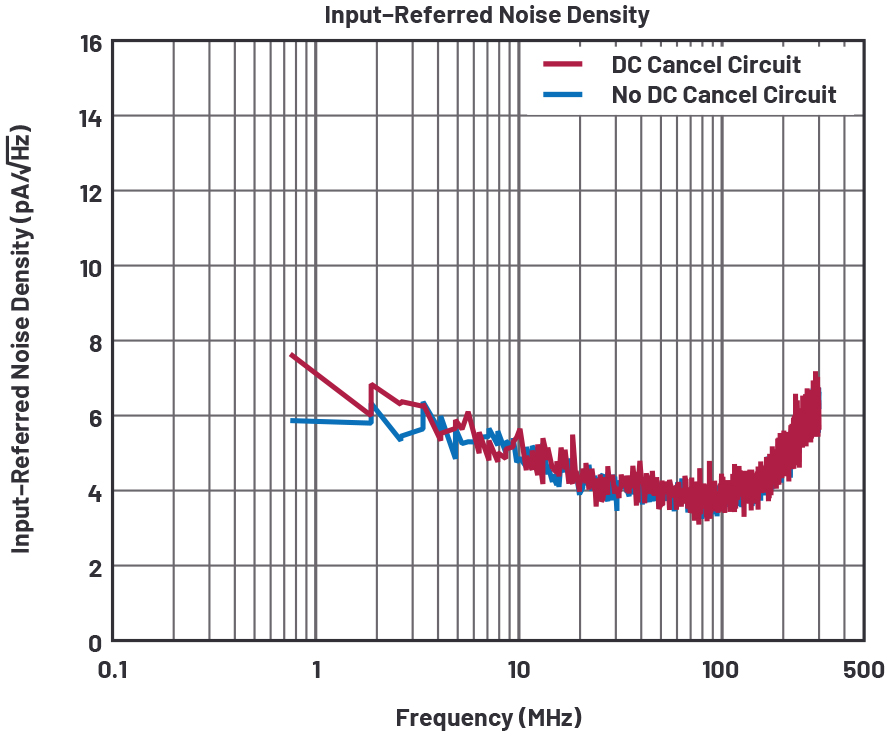 Rysunek 8. Gęstość szumów w stosunku do wejścia
Rysunek 8. Gęstość szumów w stosunku do wejścia
Podsumowanie
Sprzężenie zmiennoprądowe wejść LTC6560 i LTC6561 może stwarzać pewne problemy. W większości sytuacji nie można zaimplementować sprzężenia AC bez znaczącego wpływu na pracę obwodu. W nowoczesnych systemach LIDAR, aby zmaksymalizować wydajność systemu, stosuje się obwód tłumienia prądu stałego oparty o sprzężenie DC. Zapewnia on krótki czas stabilizacji i minimalny wpływ na poziom szumów w obwodzie. Ceną jest natomiast złożoność układu i zwiększone zużycie energii przez wzmacniacz błędu.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






