Podstawy radarów: jak zbudować system radarowy FMCW na częstotliwość 24 GHz
Ten artykuł stanowi wprowadzenie do tematu radarów z falą ciągłą z modulacją częstotliwościową (z ang. frequency modulated continuous wave, w skrócie FMCW), w paśmie ISM 24 GHz. Omawia on główne elementy wymagane dla tego typu systemu radarowego, takie jak generowanie zmian częstotliwości, nadawanie i odbieranie sygnału, konwersja częstotliwości w dół i próbkowanie.
Wstęp
Radary to w najprostszym ujęciu czujniki używane do wykrywania obiektów. Różne typy radarów mają różne właściwości dotyczące wykrywania, a także ilości informacji, które mogą odebrać z każdego obiektu. Nie ma jednego systemu radarowego, który najlepiej sprawdzałby się we wszystkich zastosowaniach. Niektóre radary o niższej złożoności, takie jak radary z falą ciągłą (CW), mogą wykrywać tylko prędkość pojedynczego obiektu. Na ogół pozwala to uzyskać stosunkowo prosty i tani system zarówno pod względem sprzętowym, jak i programowym. Istnieją jednak inne scenariusze, w których znajomość odległości od obiektu, a nawet jego rozmiaru, ma ogromne znaczenie i dlatego wymagany jest bardziej złożony system. Radar FMCW umożliwia już pomiar odległości i prędkości wielu obiektów. Oferuje też dobry kompromis między ilością uzyskiwanych danych, złożonością konstrukcji i jej kosztami. Zapewnia również dużą elastyczność, dlatego też będzie tematem tego artykułu.
Jako główny przykład konstrukcji posłuży platforma deweloperska ADI TinyRad (schemat blokowy na rysunku 1). Proces projektowania i implementacji systemu pomoże zobrazować niektóre kwestie i kompromisy projektowe, które należało uwzględnić.
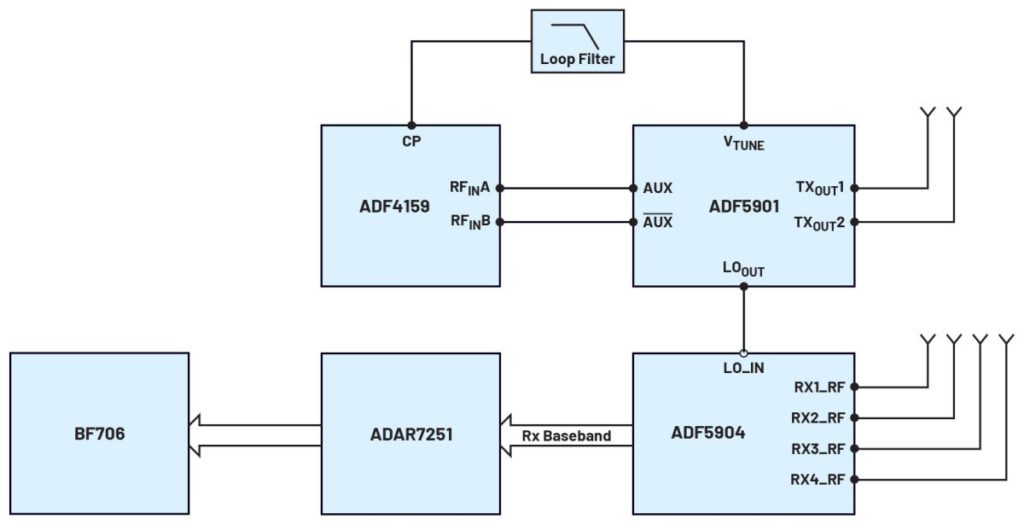
Rysunek 1. Schemat blokowy płytki EV-TINYRAD24G. Bloki zostaną szczegółowo wyjaśnione w tym artykule
Co próbujesz wykryć?
Przed podjęciem decyzji o częstotliwości działania lub konkretnej topologii radaru, który ma być używany, warto najpierw ustalić parametry obiektu (obiektów), które radar powinien być w stanie wykryć:
- Rozmiar i materiał,
- Maksymalny zasięg,
- Maksymalna prędkość obiektu,
- Odległość od innych obiektów,
- Ilość wymaganych informacji o obiekcie. Czy wymagany jest wyraźny obraz obiektu, czy wystarczy pomiar punktowy?
Skuteczna powierzchnia odbicia (ang. radar cross section, RCS) jest miarą zdolności obiektu widocznego dla radaru do odbijania fal. Człowiek ma RCS w przybliżeniu równy 1 m².
Zasięg działania radaru można oszacować za pomocą wzoru pokazanego w równaniu 1. Poza charakterystyką obiektu (RCS podany jako σ), głównymi aspektami określającymi zasięg radaru są długość fali (λ), wzmocnienie anteny (GTx i GRx) oraz moc na stopniach nadawania (PTx) i odbioru (PTx). Maksymalny zasięg radaru to odległość, przy której moc odbitego sygnału jest równa minimalnego wykrywalnego sygnału systemu (ang. minimum detectable signal – MDS). Równanie radaru można rozszerzyć, aby uwzględniało inne skutki i straty, takie jak absorpcja atmosferyczna, ale tutaj pokazano tylko jego podstawową postać.

Maksymalny zasięg radaru jest związany również z długością impulsu, a tym samym z częstotliwością próbkowania przetwornika analogowo-cyfrowego. Jest to określane jako maksymalny skuteczny zasięg i zależy od czasu potrzebnego do odbicia impulsu nadawczego i wyekstrahowania prawidłowych danych.
Maksymalna prędkość, jaką może wykryć radar FMCW, jest związana z długością fali i czasem przemiatania, co pokazuje wzór 2.

Biorąc przykładowy okres modulacji 280 µs, maksymalna prędkość obiektu wyniosłaby około 44 km/h.
Uzyskane sygnały zdemodulowane do pasma podstawowego muszą zostać przed przetwarzaniem jeszcze spróbkowane. W praktyce więc przy obliczaniu maksymalnej wykrywalnej prędkości uwzględniania jest również częstotliwość próbkowania przetwornika ADC i liczba analizowanych próbek (N). Liczba próbek może oczywiście zostać zmniejszona, aby umożliwić wykrywanie szybkich zmian, ale spowoduje to pogorszenie się rozdzielczości prędkości.

W dalszej części artykułu, w rozdziale o przetworniku ADC i próbkowaniu, omówimy dalsze kwestie dotyczące kwantyzacji sygnałów radarowych.
Rozważania dotyczące częstotliwości
Wyższe częstotliwości pracy mają kilka zalet. Przykładowo mniejsza długość fali zapewnia dokładniejszą detekcję odległości i klasyfikację obiektów. Oznacza również mniejsze rozmiary anten, co prowadzi do mniejszych rozmiarów całego systemu. W niektórych przypadkach anteny mogą być nawet wbudowane w układ scalony. Przekonajmy się jednak, że wyższa częstotliwość nie zawsze jest lepsza.
W przypadku radaru FMCW szerokość przemiatania jest bezpośrednio związana z rozdzielczością pomiaru. Można ją obliczyć z równania 4. Rozdzielczość odległości to minimalna odległość od siebie dwóch obiektów, pozwalająca radarowi wywnioskować, że są to oddzielne przedmioty. Wymagana rozdzielczość pomiaru odległości jest jednym z najważniejszych czynników przy wyborze częstotliwości pracy radaru, ponieważ nie jest możliwe jej zwiększenie bez poszerzenia pasma przemiatania, co nie zawsze jest opłacalne (a nawet możliwe) ze względu na ograniczenia pasma.
24 GHz to pasmo ISM (Industrial, Scientific, Medical), co oznacza, że ograniczenia na rynkach, na których radar może być sprzedawany jako produkt komercyjny są minimalne. Istnieją pewne różnice dla każdego regionu, ale ogólnie pasmo ISM 24 GHz obejmuje zakres od 24 GHz do 24,25 GHz. Korzystając z równania 4, dowiemy się, że odpowiada to rozdzielczości pomiaru odległości około 60 cm.

Pasmo 77 GHz ma stosunkowo szeroki przydział pasma do 5 GHz. Daje to wyjątkowo wysoką rozdzielczość pomiaru odległości, ale ma też pewne poważne ograniczenia. Główną wadą pasma 77 GHz jest to, że jest ono odgórnie ograniczone wyłącznie do zastosowań motoryzacyjnych. W niektórych regionach istnieją pewne wyjątki, takie jak wykrywanie poziomu w zbiornikach przemysłowych, ale są to rzadkie przypadki. Inną wadą jest to, że przemiatanie aż tak szerokiego pasma do 5 GHz, stanowi wyzwanie dla standardowej analogowej topologii pętli synchronizacji fazowej (PLL) i oscylatora sterowanego napięciem (VCO). W rezultacie, aby uzyskać wymaganą liniowość zmian częstotliwości, potrzebny jest złożony (i kosztowny) system radarowy.
Innymi wadami pracy w paśmie 77 GHz jest konieczność starannego zaprojektowania PCB, produkcji i kalibracji anteny.
Pasmo 60 GHz, podobnie jak 77 GHz, ma również dużą szerokość pasma i wiele zalet, będąc jednocześnie pasmem ISM. Tym niemniej sygnał 60 GHz rozchodzący się w powietrzu ma znacznie wyższe tłumienie ze względu na charakterystykę absorpcji tlenu. Często radary na 60 GHz mają efektywny zasięg mniejszy niż 20 m.
Rozdzielczość kątowa
Rozdzielczość kątowa radaru jest bezpośrednio związana z aperturą anteny odbiorczej (D), a także ogólnej liczby elementów. Aby znaleźć pozycję obiektu, wymagane są co najmniej dwa kanały odbiorcze. Jeśli znana jest odległość między antenami odbiorczymi, wówczas opóźnienie odbitego sygnału pomiędzy kanałami można wykorzystać do triangulacji i obliczenia położenia obiektu względem radaru.

Większość radarów FMCW pokazuje obiekt tylko w przestrzeni 2D. Oznacza to, że nie wykrywają wysokości obiektu. Istnieje jednak kilka zaawansowanych technik, które można wykorzystać do oszacowania wysokości, na przykład za pomocą radaru monoimpulsowego. Wymaga to, aby transmitowane sygnały miały dodatkowe kodowanie, a wysokość obiektu mogła być obliczona na podstawie tych zakodowanych danych. Wymaga to jednak złożonego systemu przemiatania częstotliwości i zaawansowanych algorytmów przetwarzania. Dlatego ten artykuł skupia się na standardowej topologii radaru FMCW do obrazowania obiektów w przestrzeni 2D.
Generowanie sygnału przemiatania częstotliwości
Jak omówiono w rozdziale “Co próbujesz wykryć?”, szybkość zmian częstotliwości zależy głównie od tego jak szybkie obiekty chcemy wykrywać.
Najprostszą metodą generowania przebiegów FMCW jest użycie PLL i VCO jako syntezatora częstotliwości. Niektóre modele PLL mają wbudowane specjalne układy do przemiatania częstotliwości. Wykorzystują one wewnętrzne timery i zegary do automatycznego wewnętrznego zwiększania licznika N pętli. Zwiększenie licznika N zwiększy częstotliwość wyjściową, tworząc profil przemiatania częstotliwości. Dokładny profil i przebieg w czasie można dostosować do konkretnego zastosowania — na przykład zastosować przebieg piłokształtny lub trójkątny czy też dodać odpowiednie okresy opóźnienia.
Alternatywną metodą generowania sweepów jest użycie zewnętrznych generatorów, który ustala sygnał między pompą ładunkową a VCO. Inną opcją jest użycie pętli PLL w konfiguracji o stałej częstotliwości i użycie cyfrowego syntezatora bezpośredniego (DDS) jako referencyjnego sygnału wejściowego. DDS umożliwia szybkie przełączanie częstotliwości, dzięki czemu wartość sygnału odniesienia może zostać przesunięta w celu utworzenia fali narastającej z PLL.
W radarach FMCW duże znaczenie ma czas synchronizacji pętli PLL, ze względu na niezbędne w tej technologii szybkie skoki częstotliwości. W przypadku PLL sparowanej z jednopasmowym oscylatorem VCO, największym czynnikiem wpływającym na czas ustalania jest szerokość pasma filtra pętli. Większa przepustowość pętli zapewnia krótki czas ustalania, ale może również zwiększyć szum fazowy. Jeśli szerokość pasma pętli jest zbyt wąska, zmiana częstotliwości może z kolei nie być liniowa — szczególnie w fazie opadania częstotliwości modulującej. Może również występować nadmierne niedosterowanie, które prowadzi do problemów z emisją widmową i zgodnością z normami. W przypadku FMCW z szybkim przemiataniem istnieje ograniczenie szerokości pasma filtru pętli PLL. Praktyczna zasada mówi, że nie powinna ona przekraczać częstotliwości 10/PFD (PFD – częstotliwość detektora fazy). W praktyce osiągnięcie szerokości pasma filtra pętli powyżej 2 MHz może być trudne ze względu na wymagane małe rozmiary kondensatorów i efekty pasożytnicze obecne na płytce PCB. Z kolei jeśli ma być używany aktywny filtr pętli, to inną praktyczną zasadą jest to, że iloczyn pasma i wzmocnienia (określany jako GBP) wzmacniacza operacyjnego powinien być co najmniej 10 razy większy niż częstotliwość detektora fazy.
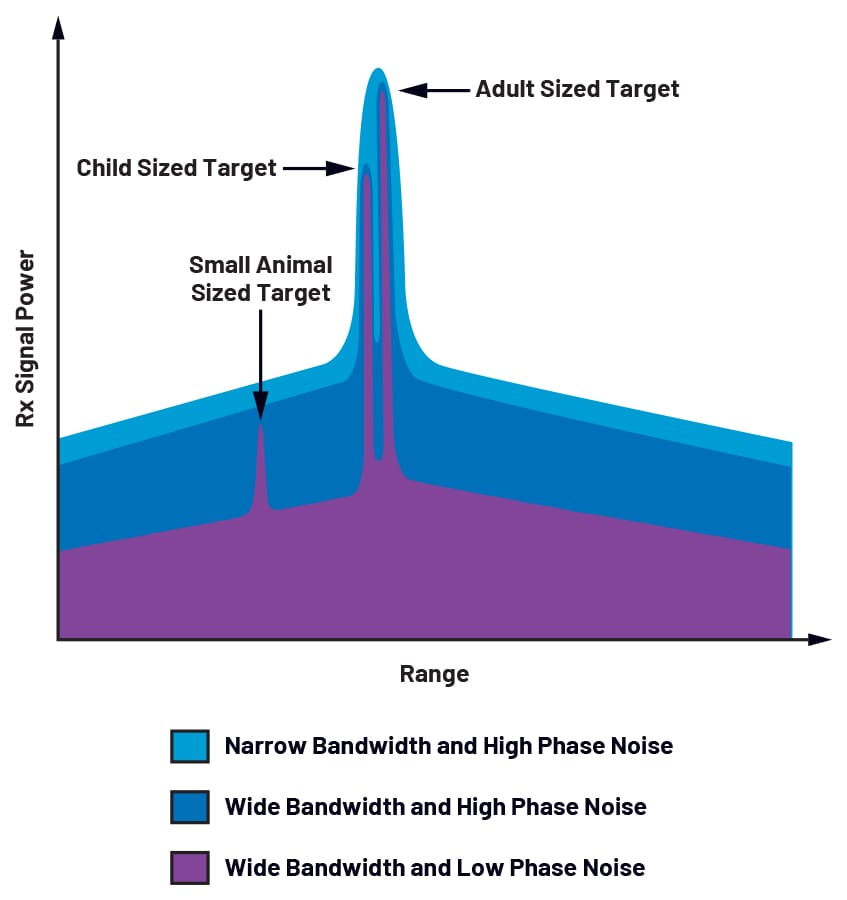
Rysunek 2. Diagram przedstawiający kilka wykrytych obiektów, a także wpływ szerokości przemiatania i szumu fazowego na zdolność wykrywania i rozróżniania obiektów
Do przeprowadzania analizy częstotliwości i analizy przemiatania w funkcji czasu dla układów PLL, które zawierają generatory sweepów, można wykorzystać bezpłatne oprogramowanie ADIsimPLL™.
Zobacz samouczek wideo „Używanie ADIsimPLL do symulacji zmian częstotliwości na ADF4158”.
Układ PLL ADF4159 pozwala na generowanie zmian częstotliwości i jest obsługiwany przez oprogramowanie ADIsimPLL, więc w tym przykładzie zostanie on potraktowany jako generator. Jego maksymalna częstotliwość pracy to 13 GHz. Należy więc użyć VCO z wyjściem divide-by-2 podłączonym do wejścia PLL aby uzyskać sygnał w paśmie 24 GHz.
Stopień nadawania (Tx)
Aby skutecznie transmitować sygnał FMCW z wystarczającym wzmocnieniem oraz przesłać go do anteny wymagany jest układ nadawczy. Zasięg radaru zależy oczywiście od mocy nadawanego sygnału.
Oscylator VCO również jest wymagany do synchronizacji z pętlą PLL omówioną w poprzednim rozdziale. Stopień nadawczy można zbudować z osobnych układów scalonych, gdzie wyjście VCO jest dzielone pomiędzy pętlę PLL i stopień wzmocnienia mocy. Inną opcją jest zintegrowany układ mikrofalowy (MMIC) ADF5901. Zawiera on oscylator VCO na częstotliwości z zakresu 24 – 24,25 GHz z wbudowanym dzielnikiem przez 2 na wyjściu, które można połączyć z układem pętli PLL ADF4159. ADF5901 zawiera również wzmacniacz mocy na wyjściu, który zapewnia moc wyjściową do 8 dBm. Jest ona wystarczająca dla zasięgu do około 100 m (dla RCS = 1 m2). Aby rozszerzyć zasięg, można zastosować dodatkowe zewnętrzne stopnie wzmocnienia.
ADF5901 ma dwa wyjściowe kanały nadawcze. W normalnej pracy używany jest tylko jeden z nich. Kanały transmisyjne można jednak przełączać podczas pracy w trybie MIMO (ang. multiple input multiple output) (patrz rozdział Inne cechy).
Sygnał oscylatora lokalnego jest również wymagany do obniżania częstotliwości odbieranego sygnału radarowego. Ta częstotliwość powinna zawsze być dokładnie taka sama jak dla nadawanego sygnału. Więcej informacji na temat obniżania częstotliwości znajdziesz w następnym rozdziale.
Stopień odbioru (Rx) i konwersja częstotliwości w dół
Jak wcześniej napisano, do triangulacji pozycji kątowej obiektu wymagany jest więcej niż jeden kanał odbiorczy. Pokazaliśmy również, że rozdzielczość kątowa systemu radarowego jest bezpośrednio związana z liczbą kanałów odbiorczych. W przypadku układu odbiorczego naszego radaru rozważymy mikrofalowy układ ADF5904.
ADF5904 zapewnia cztery kanały odbiorcze dające jednak przeciętną rozdzielczość kątową. Jednym ze sposobów zwiększenia liczby kanałów jest użycie wielu układów odbiorczych. Można to zrobić, upewniając się, że wszystkie otrzymują ten sam sygnał lokalnego oscylatora, w celu precyzyjnego obniżania częstotliwości. W przypadku tylko dwóch układów ADF5904, biorąc pod uwagę dostępną moc wyjściową LO ADF5901 i czułość wejściową LO ADF5904, wystarczający jest pasywny rozdzielacz, taki jak dzielnik Wilkinsona. W celu dalszego zwiększenia liczby kanałów odbiorczych, wymagane jest pewne wzmocnienie mocy (takie jak HMC863ALC4) na wyjściu LO.
Większa liczba kanałów odbiorczych spowoduje wyższą wydajność radaru, ale wiąże się to ze zwiększonym obciążeniem danymi, co wymaga większej mocy obliczeniowej. Przy wielu kanałach odbiorczych w radarze obrazującym przetwarzanie w czasie rzeczywistym może wymagać drogiego rozwiązania FPGA ze złożonym oprogramowaniem, podczas gdy ograniczona liczba kanałów oznacza, że do przetwarzania i transmisji danych można zastosować stosunkowo niedrogi procesor DSP. Dlatego w tym przykładzie użyto tylko jeden układ ADF5904 z czterema kanałami odbiorczymi. Aby jednak zwiększyć efektywną liczbę kanałów odbiorczych, wykorzystamy pracę w trybie MIMO przy wyborze dwukanałowej konfiguracji nadawczej.
Moc sygnałów odbitych od obiektów to niewielki ułamek transmitowanej mocy sygnału; dlatego zwykle do wzmocnienia odbieranych sygnałów używany jest wzmacniacz niskoszumny (LNA). Innym problemem związanym z niską mocą sygnału odbitego jest to, że współczynnik szumów (NF) i wynikający z tego szum wyjściowy stopnia odbiorczego będą wpływać na minimalny wykrywalny sygnał (MDS) i mogą znacznie ograniczyć maksymalny zasięg systemu.
Przy niskim współczynniku szumów, w zależności od wymaganego stosunku sygnału do szumu, istnieje możliwość, że obiekty mogą w ogóle nie zostać wykryte. Tradycyjny system komunikacyjny zwykle powinien mieć SNR przynajmniej 3 dB. W przypadku systemu radarowego wymagania są wyższe, a typowe minimalne wartości SNR mieszczą się w zakresie od 10 dB do 15 dB. Wymagana wartość będzie zależała też od konkretnego zastosowania. Na przykład, jeśli ważne jest zmniejszenie możliwości pominięcia obiektów, wymagany jest niższy minimalny SNR. Jeśli zamiast tego należy zminimalizować możliwość fałszywego wykrycia nieistniejących obiektów, lepszym rozwiązaniem jest wyższy minimalny SNR. ADF5904 ma współczynnik szumów 10 dBm, co daje MDS około –94 dB dla pasma podstawowego 1 MHz i SNR 10 dB.
W przypadku obniżania częstotliwości radaru FMCW, odebrany sygnał musi zostać porównany z sygnałem nadawczym lub (w tym przypadku) z replikacją sygnału LO. LO jest podawany do mieszacza, aby skonwertować w dół częstotliwość odbieranego sygnału. W radarach FMCW powszechnie stosowana jest konwersja bezpośrednia, znana również jako mieszacz homodynowy. ADF5904 zawiera właśnie taki mikser. Dane wyjściowe miksera to sygnał rzeczywisty (nie zespolony). Faza, a tym samym prędkość obiektu, jest określana na podstawie analizy FFT. (Zobacz artykuł „Rozwiązania radarowe Demorad 24 GHz umożliwiające zastosowanie nowy czujników bezdotykowych dla rynku przemysłowego” (ENG) na temat formatu danych używanego w platformie TinyRad).
Przetworniki analogowo-cyfrowe i próbkowanie
Zanim dane FMCW będą mogły zostać przetworzone i użyte do wyekstrahowania informacji o widocznych obiektach, sygnały w paśmie podstawowym muszą zostać przefiltrowane i spróbkowane przy użyciu odpowiedniego wejściowego analogowego front-endu (AFE) i przetwornika ADC. Poza zwykłymi cechami ADC, takimi jak liczba kanałów, zakres dynamiczny, SNR, możliwość jednoczesnego próbkowania każdego kanału i dostępnych opcji filtrowania, wybór przetwornika będzie zależał od tego, czy radar będzie musiał wykorzystywać szybkie zmiany częstotliwości, aby umożliwić wykrywanie wielu szybko poruszających się obiektów.
Nasz odbiornik ADF5904 obsługuje szerokość pasma demodulacji do 10 MHz. Oznacza to, że proponowany system radarowy może obsługiwać przemiatanie o niskiej lub też stosunkowo wysokiej szybkości.
Zmiany o niskiej szybkości będą miały małą szerokość pasma podstawowego w granicach 500 kHz, podczas gdy zmiany o dużej prędkości wymagają toru sygnałowego o dużej szybkości do obsługi pasma podstawowego o szerokości 10 MHz i wyższej.
Układ ADAR7251 zaprojektowano do bezpośredniego łączenia z ADF5904, dlatego jest dobrym rozwiązaniem dla wolnych zmian FMCW ze względu na niski poziom szumów i zakres dynamiki.
W przypadku zastosowań, w których wymagane jest wykrywanie szybko poruszających się obiektów, dobra opcją jest układ AD8285. Obsługuje szersze pasmo wejściowe do 12 MHz i wyższe częstotliwości próbkowania, poświęcając w porównaniu do ADAR7251 poziomu szumów, wzmocnienia, opcji filtrowania i rozdzielczości.
Większa ilość danych wynikająca z szybszego przemiatania radaru, może również oznaczać, że do obsługi danych konieczny będzie układ FPGA, podczas gdy wolniejsze zmiany oznaczają mniej danych, a więc można użyć tańszego procesora DSP. W przypadku naszego systemu radarowego dążyliśmy do uzyskania dobrej równowagi między wydajnością a kosztami i będziemy to kontynuować, wybierając jako przetwornik układ ADAR7251.
Projekt anteny
Projektowanie anten jest złożonym tematem i wykracza poza zakres tego artykułu. W celu uzyskania dokładnego rozróżniania kątowego elementy odbiorcze nie powinny być oddalone od siebie o więcej niż 0,5λ. W tym projekcie dla każdego kanału nadawczego i odbiorczego zostaną użyte identyczne anteny mikropaskowe. Kanały nadawcze powinny być oddalone od siebie o więcej niż 0,5λ, aby umożliwić działanie technologii MIMO. Ta technika jest omówiona w następnej sekcji, ale odległości między wszystkimi antenami muszą być skalibrowane i zapisane, aby umożliwić obliczenia za pomocą wirtualnych szyków antenowych.
Inne funkcje
Technika MIMO została wspomniana w tym artykule kilka razy. Jest to technika, której można użyć do zwiększenia efektywnej liczby kanałów odbiorczych radaru w celu uzyskania wyższej rozdzielczości kątowej.
W przypadku pracy bez MIMO używany jest tylko jeden kanał nadawczy, a po sparowaniu z czterema kanałami odbiorczymi rozdzielczość kątowa wynosi około 30°.
W trybie MIMO, w kontekście tego radaru, nadawany sygnał jest wysyłany przez jeden kanał nadawczy (Tx1), a następujący po nim sygnał radarowy (lub jego zmiana) jest wysyłany do drugiego kanału nadawczego (Tx2). Separacja między kanałami nadawczymi powoduje przesunięcie w fazie sygnałów odbiorczych. Jeśli separacja między każdym elementem jest znana, zapisana i skalibrowana, wówczas to przesunięcie można wykorzystać do utworzenia dodatkowych wirtualnych elementów antenowych.
Oznacza to, że w trybie MIMO radar ma efektywnie siedem elementów odbiorczych. Cztery to rzeczywiste elementy fizyczne, cztery to z punktu widzenia Tx2 przesunięte elementy wirtualne, a element środkowy to nakładanie się jednego elementu rzeczywistego i wirtualnego. Rozdzielczość kątowa jest poprawiona do wartości poniżej 20°.
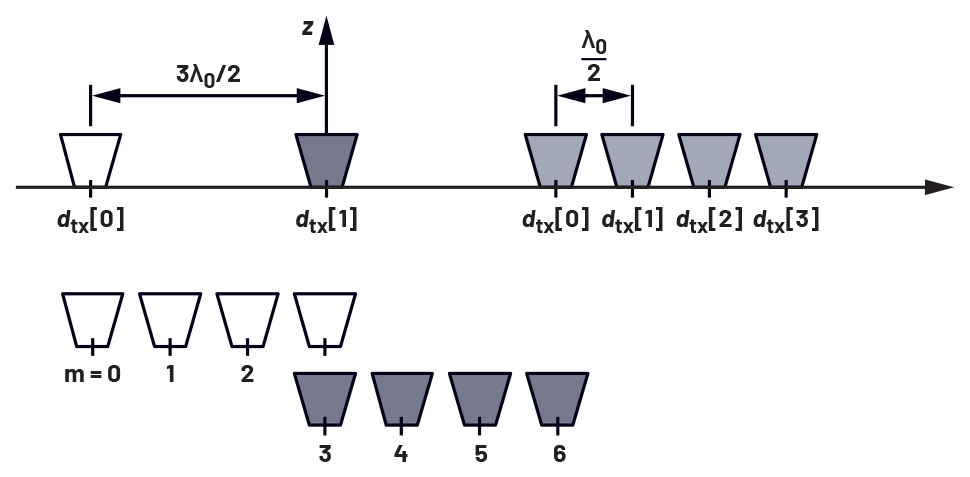
Rysunek 3. Górny rysunek pokazuje fizyczne pozycje anten i odległości, a dolny pokazuje, jak będą one wyglądać wirtualnie w trybie MIMO
Wnioski
W artykule zaprezentowaliśmy niektóre systemowe bloki radaru FMCW. Częstotliwość pracy systemu ustalono na 24 GHz, ponieważ jest to pasmo ISM. Zastosowano stosunkowo powolne przemiatanie sygnału, co pozwala skorzystać z wolniejszego toru sygnałowego i niższej szybkości transmisji danych w celu ułatwienia analizy danych w czasie rzeczywistym.
Wykazano, że zintegrowany chipset ADI zapewnia dobry poziom integracji i wysoką wydajność oraz umożliwia uproszczenie konstrukcji radaru w porównaniu z rozwiązaniem opartym o osobne układy scalone. Platforma TinyRad to gotowa platforma ewaluacyjna, która zawiera ten chipset i oprogramowanie niezbędne do natychmiastowego rozpoczęcia projektowania systemu radarowego, bez konieczności opracowania wymaganego sprzętu od podstaw. Szczegółową specyfikację działania i działania TinyRad znajdziesz w instrukcji obsługi na stronie produktu.
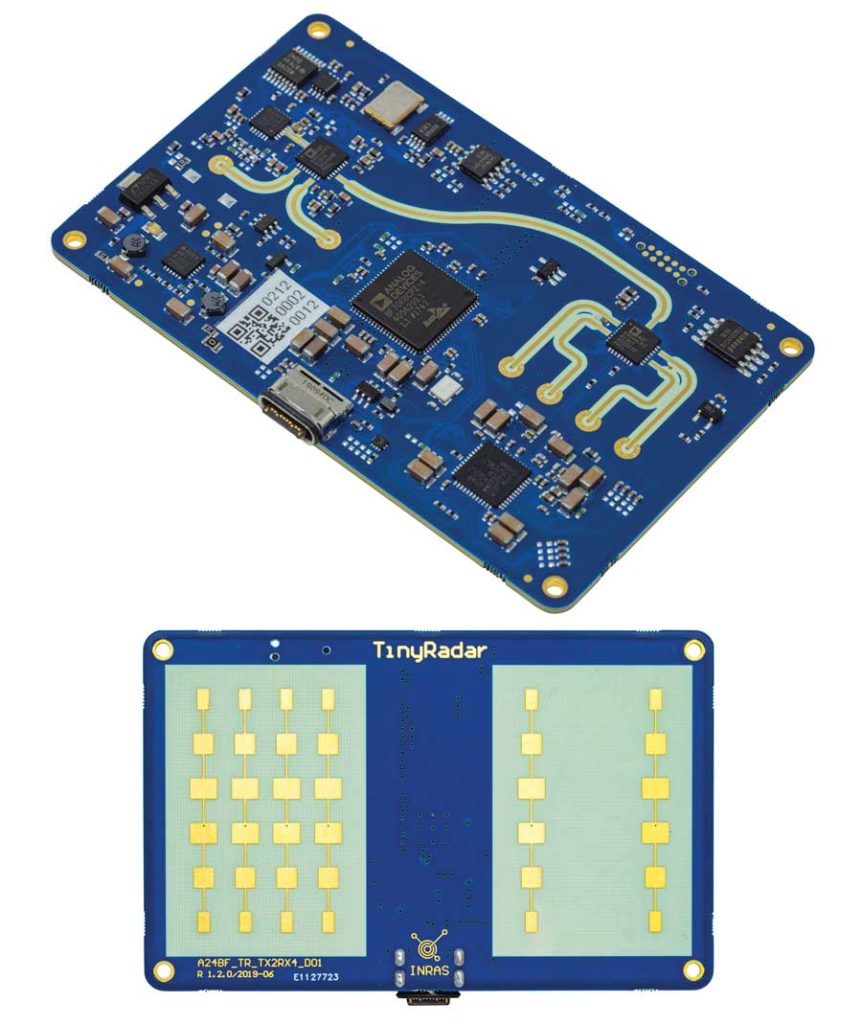
Rysunek 4. Płytka EV-TINYRAD24G, kompletny system radarowy FMCW. Górne zdjęcie pokazuje górną stronę przedstawiającą chipset ADI 24 GHz. Dolne zdjęcie ukazuje nadawcze i odbiorcze anteny mikropaskowe
Podczas gdy TinyRad oferuje dobrą wydajność w wielu zastosowaniach, może być niewystarczający w niektórych bardzo wymagających scenariuszach, takich jak detekcja szybko poruszających się obiektów lub praca przy zasięgach powyżej 200 m (w zależności od wielkości obiektu). Zaproponowano potencjalne warianty projektu TinyRad, które można wprowadzić w celu dostosowania projektu do bardziej specyficznego przypadku użycia. EV-RADAR-MMIC to płytka ewaluacyjna ze złączami, której brakuje większości funkcji plug and play TinyRad, ale dobrze nadaje się do dalszego dostosowywania, ponieważ może łączyć się z zewnętrznym ADC, procesorem i dodatkowymi stopniami wzmocnienia na kanale nadawczym i odbiorczym.
 Bezpieczeństwo AI pod presją. Cisco publikuje raport „State of AI Security 2026”
Bezpieczeństwo AI pod presją. Cisco publikuje raport „State of AI Security 2026”  IPC-A-610 i IPC-J-STD-001: Nierozłączny duet w profesjonalnej produkcji elektroniki
IPC-A-610 i IPC-J-STD-001: Nierozłączny duet w profesjonalnej produkcji elektroniki  Nie ma rzeczy niemożliwych: polska elektronika na ISS
Nie ma rzeczy niemożliwych: polska elektronika na ISS