





Jak wykonać prostą automatyzację w Selenium i zintegrować ją z elektroniką?
Tym razem Dominik Bednarski z IntHou przedstawi, w jaki sposób wykonać prostą automatyzację, gdzie przy pomocy Selenium WebDrivera, Pythona, Raspberry Pi oraz kilku gotowych układów elektronicznych można zrealizować monitorowanie na stronie stanu magazynowego produktu i na podstawie otrzymanych danych zrealizować jakąś akcję.
Więcej artykułów o projektach na blogu: InThou
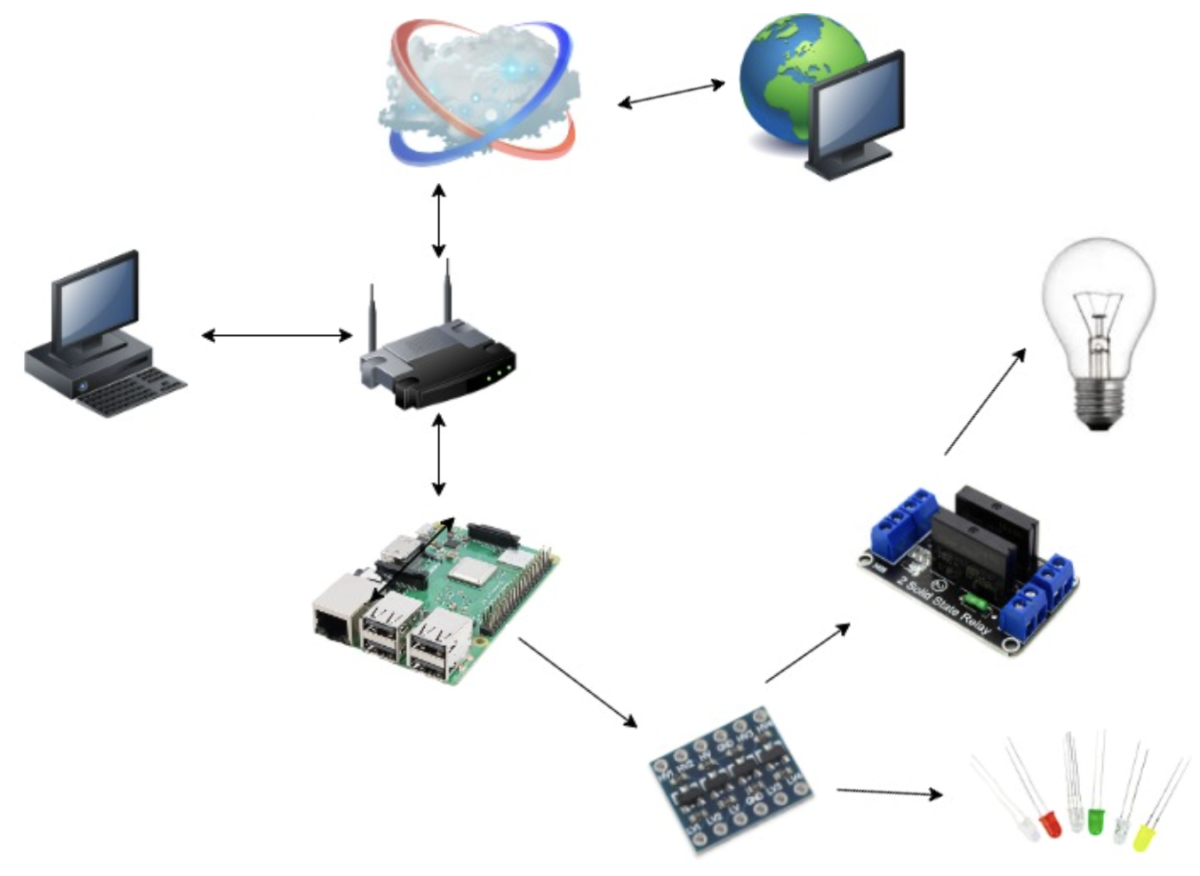
Rysunek poglądowy przebiegu komunikacji
Pobranie danych ze strony internetowej przy pomocy Selenium WebDriver
W chwili obecnej mamy już wszystkie dane, które nas interesują i możemy przejść do pisania kodu.
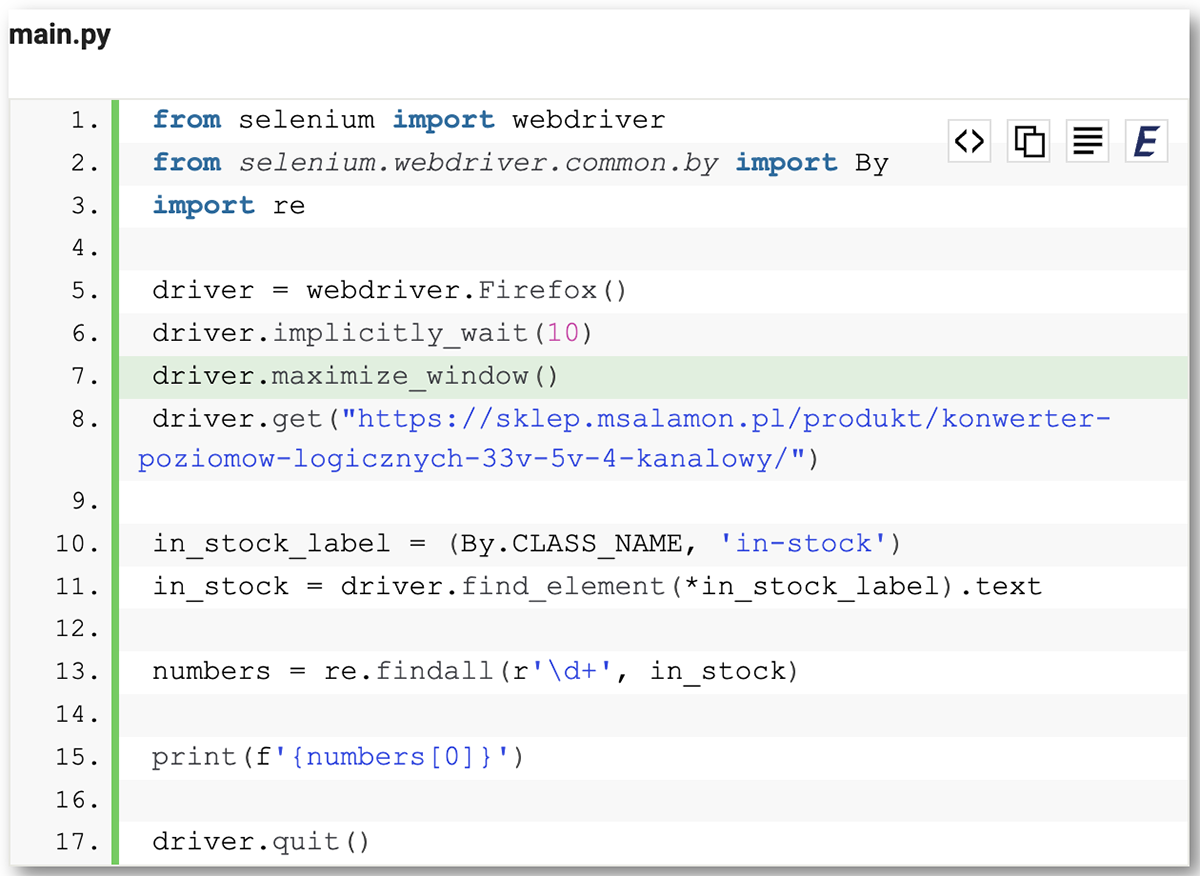
W pierwszym kroku z modułu selenium musimy zaimportować klasę webdriver oraz z modułu by klasę By. Następnie należy utworzyć instancję klasy webdriver.Firefox(), która pozwoli nam na przeprowadzenie interakcji z przeglądarką. Warto następnie ustawić czas oczekiwania na elementy, ponieważ może zdarzyć się, że mogą być ładowane z opóźnieniem.
W kolejnym kroku możemy zmaksymalizować okno przeglądarki, a następnie przejść pod nasz docelowy adres URL. Gdy już będziemy na stronie, tworzymy tak zwany lokalizator elementu, który będzie typu tuple i w niej umieszczamy dwa argumenty. Pierwszy argument informować będzie metodę, że chcemy szukać elementu po nazwie klasy, a drugi argument zawierać będzie, konkretną nazwę, którą chcemy znaleźć. W kolejnym kroku wykorzystujemy metodę find_element, w której rozpakowujemy krotkę i wykonujemy na niej właściwość text odpowiedzialną za pobranie tekstu z odnalezionego elementu na stronie.
Gdy już pobraliśmy nasz tekst, możemy zauważyć, że zawiera on więcej danych, niż potrzebujemy, dlatego dodatkowo przy pomocy wyrażeń regularnych możemy wydobyć z naszego stringu jedynie dane, które będą nas interesować. W celu weryfikacji, czy wszystko działa poprawnie dane, które wydobyliśmy, możemy wyświetlić w terminalu. Na koniec jeszcze należy po sobie posprzątać i zamknąć przeglądarkę metodą quite().
Kod takiego programu prezentuje się następująco:
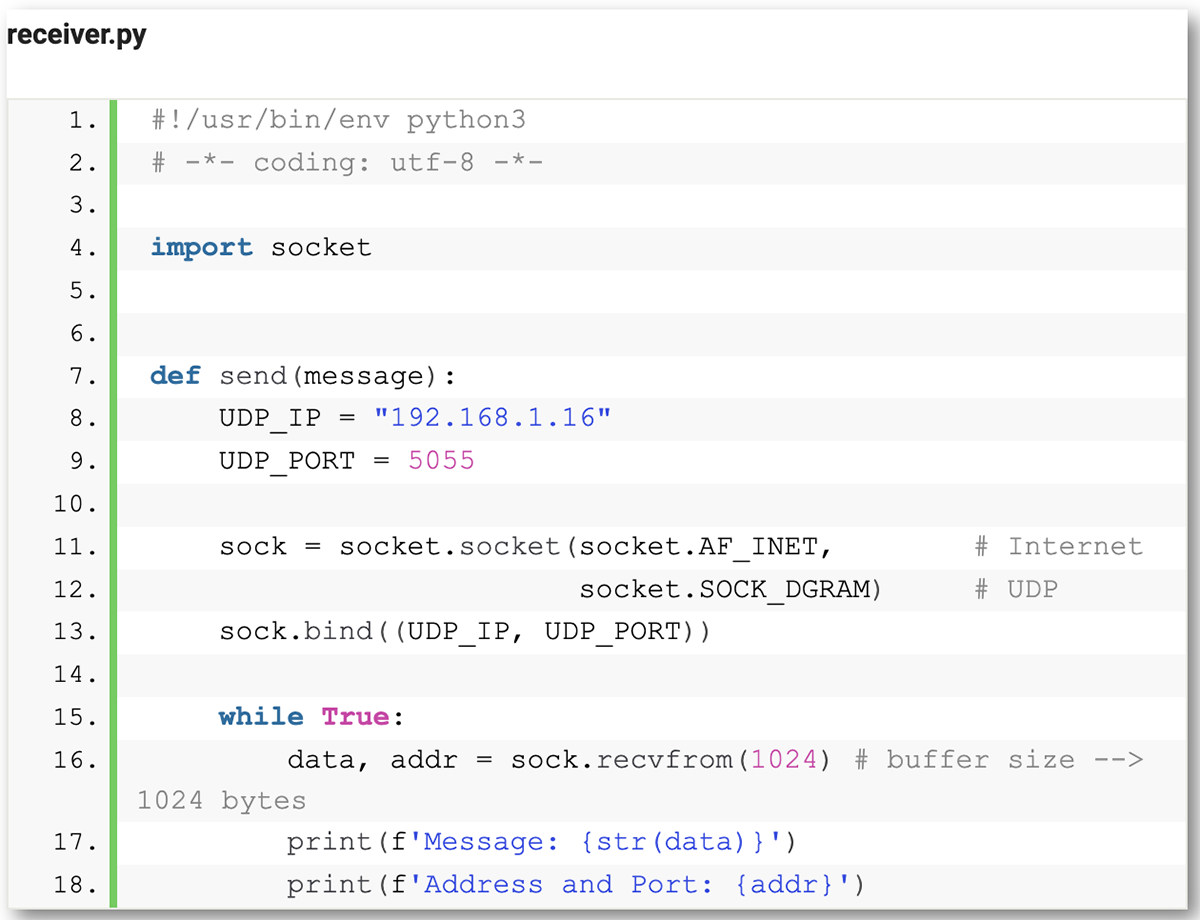
Gdy już mamy przygotowane dane, które chcemy wysłać, musimy napisać program a właściwie dwa programu, które obsłużą nam komunikację. Pierwszy program będzie odbierał dane “receiver.py” i należy umieścić go na Raspberry Pi, drugi natomiast, będzie wysyłał dane “sender.py“, dlatego umieszczamy go na komputerze.
W celu obsłużenia komunikacji po UDP, należy zaimportować moduł socket. Z modułu socket następnie należy utworzyć instancję klasy, o tej samej nazwie, czyli socket i jako argumenty podać AF_INET odpowiedzialną za poinformowanie, że komunikacja będzie odbywać się po protokołach internetowych oraz jako drugi argument należy podać SOCK_DGRAM informujący, że zostanie użyty protokół UDP. Obie stałe dostępne są pod modułem socket. Gdy już utworzymy instancję, należy przypisać do niej adres IP oraz PORT, po którym będzie odbywała się komunikacja. Port i IP podajemy naszego Raspberry Pi, ponieważ to RPi będzie serwerem. W kolejnej części należy w pętli nasłuchiwać, czy nie pojawiły się dane w buforze w tym celu, należy użyć metody recvfrom, która przyjmuje jako argument rozmiar bufora w bajtach. Metoda ta zwraca dwie wartości, gdzie jedna to dane a druga to adres, z którego przyszły dane w postaci IP i Portu. Tak otrzymane dane są gotowe to ich obrabiania.
Kod programu prezentuję poniżej:
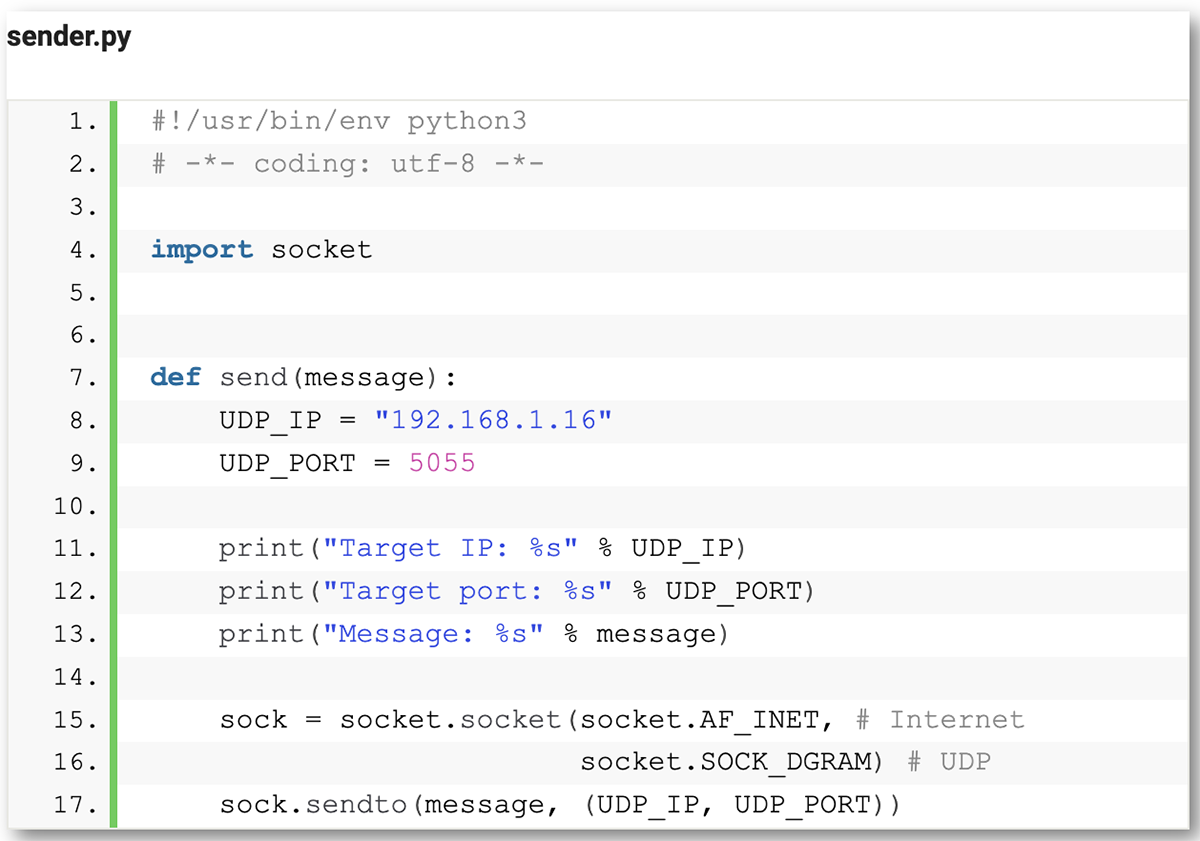
Drugi program, który będzie wysyłał dane, umieszczamy na komputerze. Podobnie jak wcześniej powtarzamy kroki z zaimportowaniem modułu socket stworzeniem instancji dla klasy socket z tymi samymi argumentami, a jedyna zmiana to użycie metody sendto, która przyjmuje argument w postaci wiadomości typu byte oraz drugi argument typle, która stanowi adres IP i Port serwera, gdzie mają być dostarczone dane.
Kod programu prezentuję poniżej:
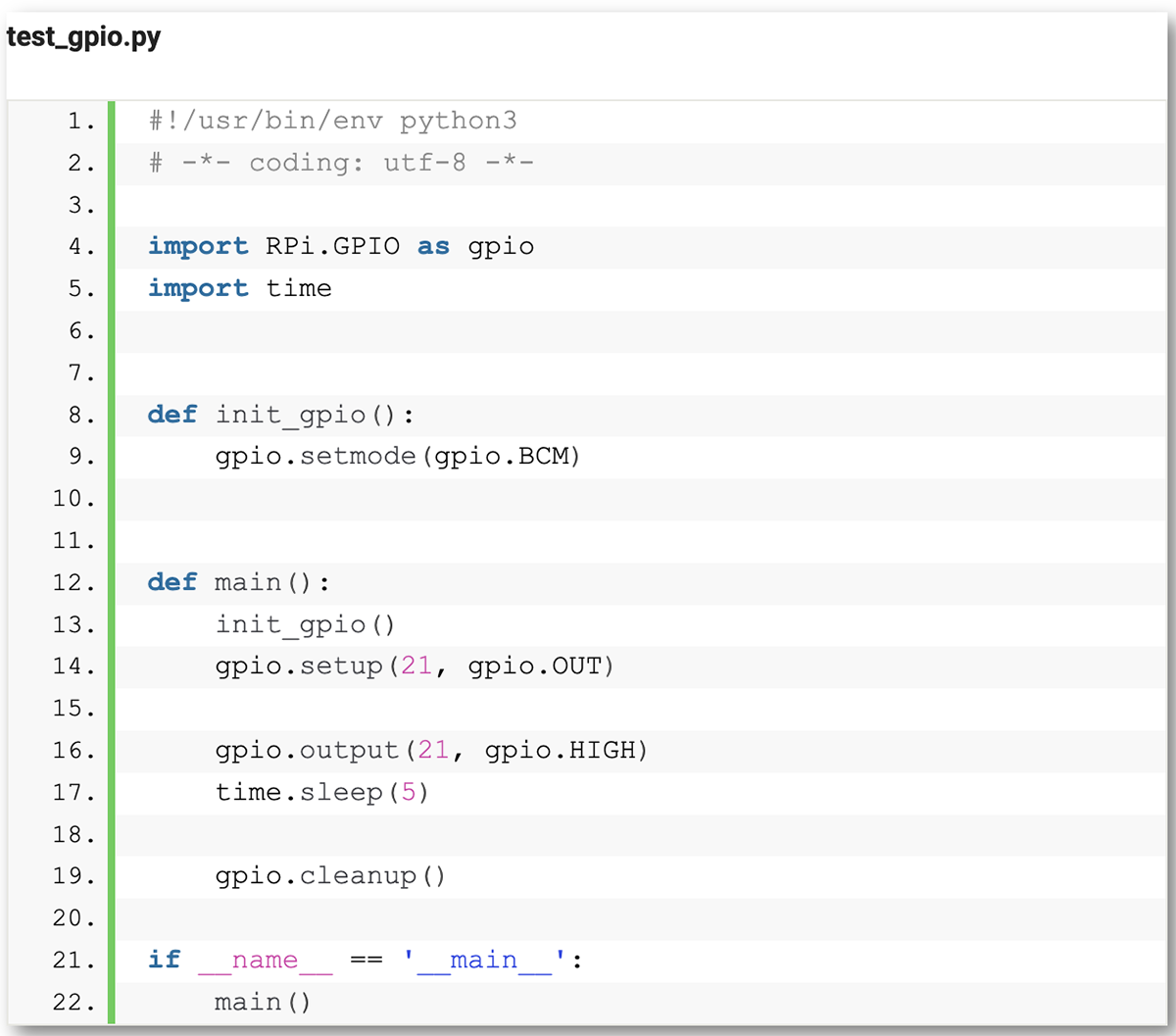
Podzielmy jednak to zadanie na dwa kroku, gdzie w pierwszym napiszemy program, który wysteruje pin a dopiero w drugim kroku połączymy go z daną, którą otrzymaliśmy. W celu wysterowania pinu należy zaimportować moduł RPi.GPIO, następnie należy ustawić tryb opisu pinów gpio. Ja ustawiłem go na gpio.BCM. W następnym kroku konfigurujemy pin na przykład o numerze 21, aby pełnił funkcję wyjścia i dopiero wówczas możemy przy pomocy metody output ustawić pin 21 na stan wysoki. Na koniec należy po sobie posprzątać korzystając z metody cleanup() tak, aby zwolnić zasoby sprzętowe. Przed posprzątaniem możemy jeszcze dać opóźnienie abyśmy mogli zaobserwować stan wysoki.
Taki kod programu prezentuje się następująco:
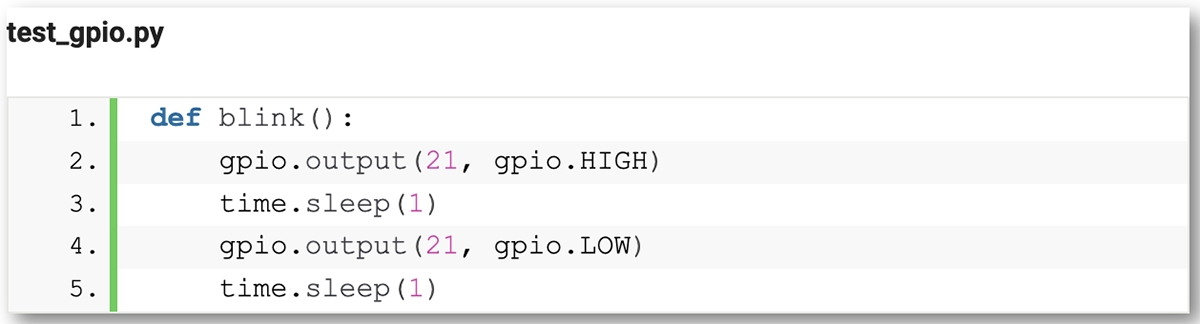
Gdy przetestujemy powyższy kod możemy napisać prostą funkcję do ustawiania pinu w stan wysoki i niski po sekundowym opóźnieniu.
W ten oto sposób możemy przejść do etapu drugiego i połączyć obydwa programy.
Do połączenia obsługi nasłuchującego serwera oraz wysterowania diody możemy użyć na przykład wątków. W jednym wątku będziemy nasłuchiwać, a w drugim będziemy obsługiwać piny. Abyśmy mogli korzystać z wątków należy je zimportować moduł threading, a następnie musimy utworzyć dwa wątki.
Dalsza część artykułu Dominika dostępna pod linkiem: IntHou
 Obliczenie FFT na mikrokontrolerze STM32 (1) – Biblioteka CMSIS, wyciek widma, okna wykorzystywane do FFT, wdrożenie w projekcie
Obliczenie FFT na mikrokontrolerze STM32 (1) – Biblioteka CMSIS, wyciek widma, okna wykorzystywane do FFT, wdrożenie w projekcie  Obliczenie FFT na STM32 (2) – Program realizujący FFT, prezentacja wyników, wyciek widma oraz jego przyczyny
Obliczenie FFT na STM32 (2) – Program realizujący FFT, prezentacja wyników, wyciek widma oraz jego przyczyny  STM32 – #1 – Jak korzystać z wbudowanego bootloadera?
STM32 – #1 – Jak korzystać z wbudowanego bootloadera? 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



