Dokładniejsze określanie położenia robotów za pomocą układów IMU – podstawowa technologia precyzyjnej nawigacji
Streszczenie
W artykule podkreślono znaczenie czujnika inercyjnego (IMU) dla lokalizacji w robotyce i przedstawiono jego kluczowe zalety. IMU stały się istotną i integralną częścią precyzyjnego pozycjonowania robotów, dostarczając kluczowych danych o ruchu. Integrują one akcelerometry, żyroskopy i magnetometry, umożliwiając robotom dokładne określenie ich orientacji, pozycji i ruchu. Ważną cechą czujników IMU jest też ich reagowanie na wszelkie zmiany tych parametrów w czasie rzeczywistym, co jest niezbędne do pracy w dynamicznie zmieniającym się środowisku. Techniki fuzji czujników łączą dane IMU z innymi czujnikami, takimi jak kamery lub LIDAR-y (Light Detection and Ranging), w celu zwiększenia dokładności lokalizacji poprzez włączenie wielu źródeł danych. IMU są szeroko stosowane w robotyce mobilnej, robotyce humanoidalnej, bezzałogowych statkach powietrznych (UAV) i rzeczywistości wirtualnej/rozszerzonej. Ich rola w osiąganiu precyzyjnej lokalizacji umożliwia robotom autonomiczne wykonywanie złożonych zadań i efektywną interakcję z otoczeniem. W artykule omówiono przypadki użycia IMU w trudnych środowiskach, w których działają roboty AMR.
Wprowadzenie
Trudno dziś sobie wyobrazić inteligentne fabryki i magazyny przyszłości bez autonomicznych robotów mobilnych (AMR). Roboty AMR zwiększają wydajność, zmniejszają ilość odpadów. Podczas gdy fabryki przyszłości mogą być budowane z uwzględnieniem wysokich wymagań i optymalizowane pod kątem działania robotów AMR, to dostosowanie tych robotów do istniejących magazynów i fabryk stanowi wyzwanie. Podstawową przeszkodą dla AMR są dwa krytyczne elementy: wydajne planowanie ścieżki (określanie optymalnej ścieżki) i precyzyjna lokalizacja (ciągłe aktualizowanie pozycji w środowisku).1
W artykule koncentrujemy się na nawigacji wewnątrz pomieszczeń w zamkniętym środowisku, w którym nie działa GPS. Roboty AMR używają wielu czujników i algorytmów do lokalizacji i nawigacji. Obejmują one czujniki wizualne, takie jak kamery, LIDAR-y i radary, a także czujniki odometryczne, takie jak enkodery kół i IMU. Każda modalność czujnika ma swoje unikatowe zalety pod względem zasięgu, dokładności i informacji sensorycznych. Połączenie tych czujników zapewnia uzyskiwanie kompleksowych danych niezbędnych do skutecznej lokalizacji robota w środowiskach dynamicznych.
Co to jest IMU?
IMU to miniaturowy układ wykonany w technologii mikroelektromechanicznej (MEMS). Zazwyczaj składają się z następujących elementów:
- Akcelerometr trójosiowy: Akcelerometry mierzą przyspieszenie w odniesieniu do ziemskiego pola grawitacyjnego. W IMU akcelerometry trójosiowe są używane do pomiaru osi x, y i z (rys. 1).
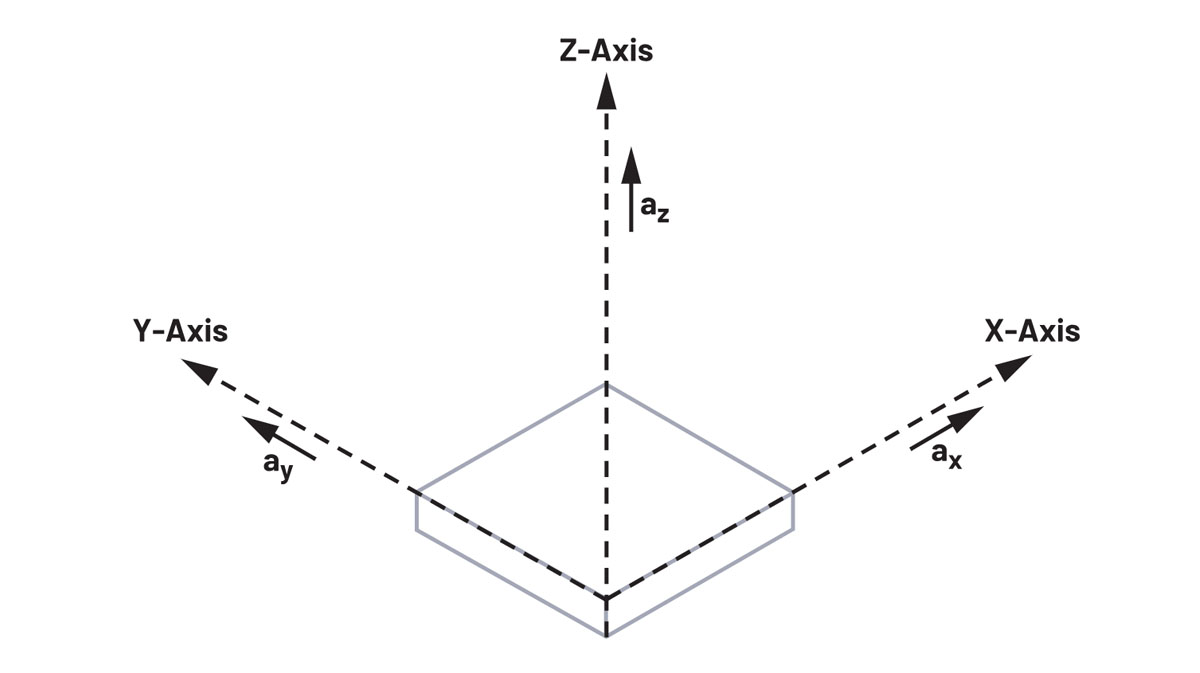
Rys. 1. Pomiary przyspieszenia w osiach x, y i z
- Żyroskop trójosiowy: Żyroskopy mierzą szybkość obrotu, uwzględniają prędkości kątowe każdej z trzech osi. Żyroskop trójosiowy umożliwia pomiar prędkości kątowej robota (ωx, ωy, ωz) wzdłuż osi x, y i z (rys. 2).
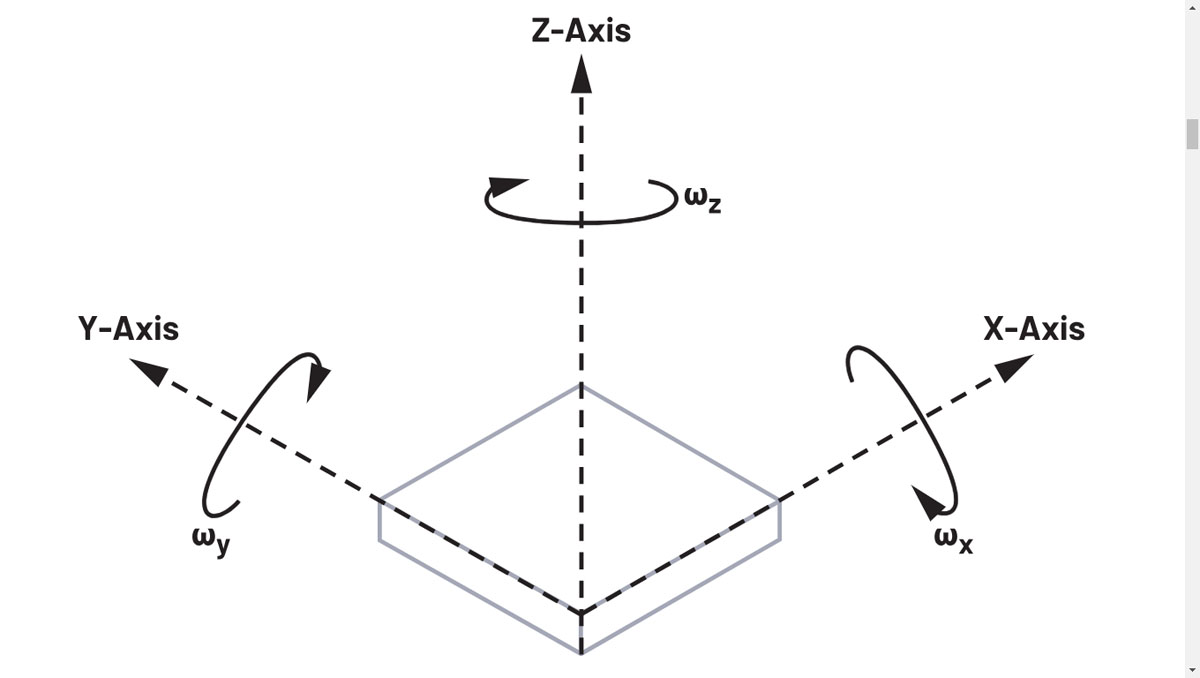
Rys. 2. Pomiary żyroskopowe w osiach x, y i z
- Magnetometr o wysokiej czułości: Zapewnia pomiary pola magnetycznego, niezbędne do dokładnego oszacowania orientacji w trudnych warunkach. Nie jest to czujnik popularny, ale jest dostępny w niektórych starszych IMU.
- Inne: Czujnik temperatury do kompensacji zmian temperatury i barometr do pomiaru ciśnienia.
Funkcjonalny schemat blokowy IMU
- Typowy IMU zawiera nie tylko żyroskopy, akcelerometry i czujnik temperatury, ale ma też przetwornik analogowo-cyfrowy pozwalający udostępniać cyfrową postać wyników, jak również umożliwiający dokonywanie automatycznej kompensacji temperatury (rys. 3).
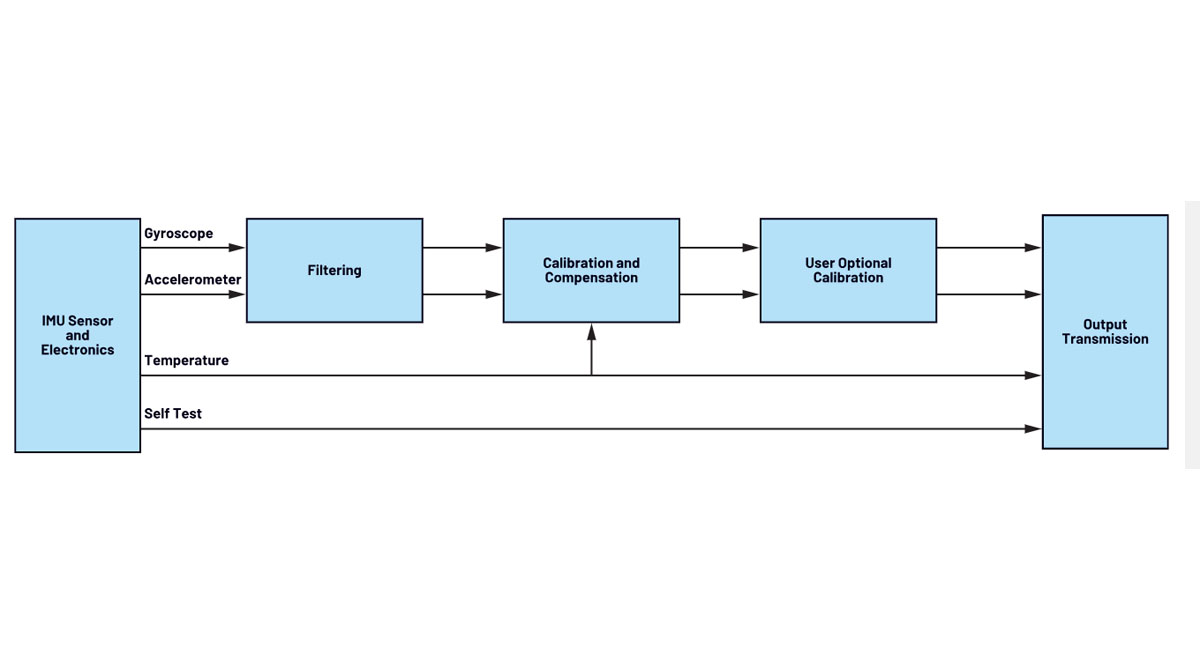
Rys. 3. Typowy blok funkcjonalny IMU
- IMU posiada zaimplementowane algorytmy wstępnego filtrowania, takie jak FIR (skończona odpowiedź impulsowa).
- Kalibracja i kompensacja korygują wszelkie niewspółosiowości lub odchylenia czujników.
- Użytkownik ma możliwość obrócenia (dƟ) wewnętrznej osi modułu IMU, aby przed przesłaniem ostatecznych danych dopasować ją do układu odniesienia robota.
Dlaczego IMU są korzystne dla AMR?
- Lokalizacja w czasie rzeczywistym z wysoką częstotliwością aktualizacji: Autonomia i nawigacja w czasie rzeczywistym to kluczowe elementy w środowisku operacyjnym robota. Czujniki percepcji działają jednak zazwyczaj z ograniczoną częstotliwością aktualizacji, wynoszącą od około 10 Hz do 30 Hz. W przeciwieństwie do nich, IMU są w stanie zapewnić wysoką wierność danych wyjściowych dotyczących pozycji, sięgającą nawet 200 Hz. Wyższa częstotliwość aktualizacji znacznie zwiększa niezawodność systemu w szybkim dostosowywaniu się do gwałtownych zmian orientacji w dynamicznym środowisku, umożliwiając niemal natychmiastową reakcję. Zwiększona częstotliwość aktualizacji pozwala również określanie szacunkowej pozycji podczas krótkich przerw między innymi pomiarami. W rezultacie IMU odgrywają kluczową rolę w osiąganiu lokalizacji w czasie rzeczywistym, przewyższając zwykłe czujniki ruchu 10-krotnie większą szybkością aktualizacji
- Dead reckoning: Jednostki IMU są podstawowymi elementami nawigacji inercyjnej, techniki służącej do szacowania bieżącej pozycji na podstawie pozycji znanej wcześniej. Metoda ta, polegająca na ciągłym dostarczaniu danych o pozycji, orientacji i prędkości w czasie jest niezawodna w nawigacji dla AMR.
- Kompaktowy rozmiar i waga: Kompaktowy rozmiar i lekka konstrukcja jednostek IMU sprawiają, że są one idealne do integracji z różnymi konfiguracjami robotów mobilnych. Na przykład układ ADIS16500 firmy Analog Devices, o wymiarach zaledwie 33,25 mm × 30,75 mm, zapewnia efektywne umieszczenie czujnika w elementach robota bez uszczerbku dla jego manewrowości.
- Wytrzymałość w różnych środowiskach: IMU są stosunkowo odporne na zakłócenia elektromagnetyczne i mogą pracować w różnych środowiskach, w tym na zewnątrz i wewnątrz pomieszczeń. Dzięki temu nadają się do szerokiego zakresu zastosowań.
- Zwiększona niezawodność dzięki przyspieszonej częstotliwości aktualizacji: W porównaniu ze zwykłymi czujnikami ruchu o ograniczonej zazwyczaj częstotliwości aktualizacji od ~10 Hz do 30 Hz, IMU wyróżniają się wysoką wiernością danych wyjściowych pozycji do 4 kHz. Zwiększona częstotliwość aktualizacji poprawia niezawodność, zwłaszcza w dynamicznych środowiskach, umożliwiając AMR-om szybką reakcję i pomoc w oszacowaniu pozycji w krótkim czasie między innymi pomiarami.
Dlaczego jednostki IMU są niezbędne dla robotów AMR pomimo dostępności czujników wizyjnych?
Jak pokazano na rys. 4, AMR zwykle zawiera różne czujniki wizualne, takie jak time of flight (ToF), kamera, LIDAR itp. Pomimo bogatego zbioru danych dostarczanych przez odometrię wizualną, nadal istnieje konieczność stosowania IMU. Poniższe scenariusze przedstawiają niektóre z powodów:
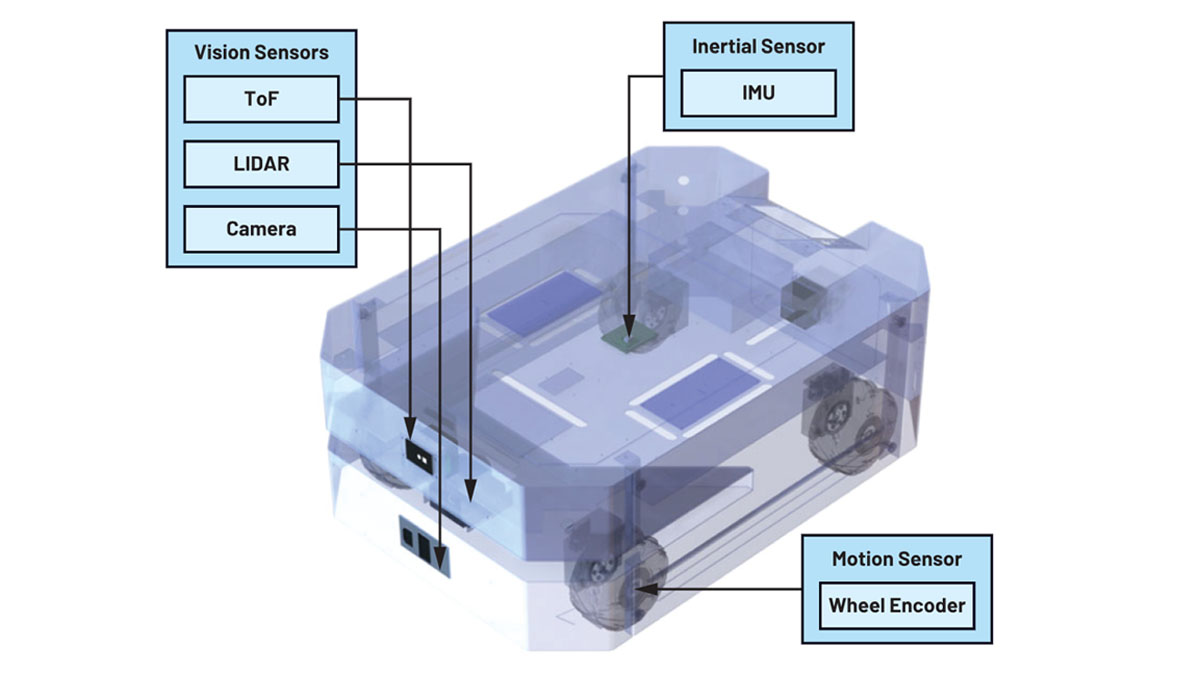
Rys. 4. Zestaw czujników AMR
- AMR poruszający się po korytarzu o małej liczbie znaków orientacyjnych: Algorytmy jednoczesnej lokalizacji i mapowania (SLAM) zasadniczo działają poprzez dopasowanie obserwowanych danych z czujników do zapamiętanej mapy, i na tej podstawie określenia własnej pozycji. Gdyby pojazd AMR podróżował długim korytarzem (rys. 5), z pewnością szybko straciłby swoją pozycję. Ze względu na brak charakterystycznych cech, takich jak proste ściany o jednolitym kolorze, teksturze lub współczynniku odbicia, SLAM ma trudności z precyzyjną lokalizacją. W tym przypadku IMU działają jako cenny system naprowadzania, dostarczając informacji o kierunku i orientacji.
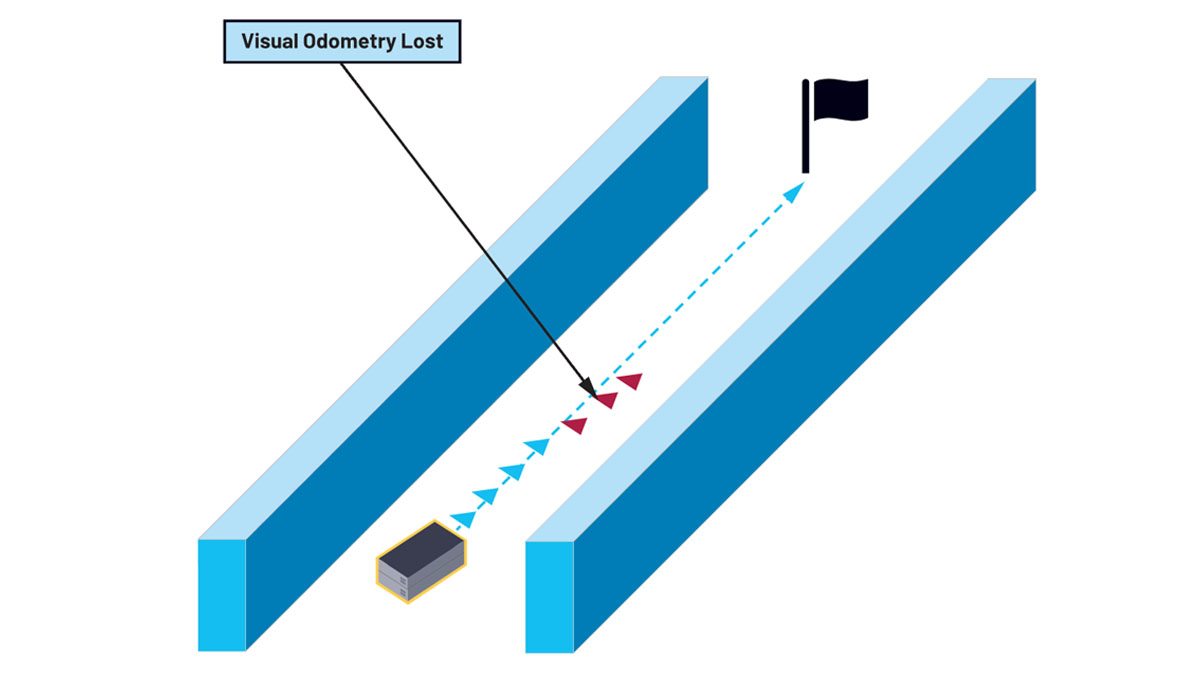
Rys. 5. AMR traci odometrię wizualną w pozbawionym cech korytarzu
- Nawigacja w rozległych, otwartych środowiskach: Ograniczenia zasięgu – Podczas pracy na dużej otwartej przestrzeni, takiej jak ogromny magazyn (powiedzmy 50 m × 50 m), AMR mają trudności z lokalizacją, ponieważ unikatowe cechy wykraczają poza zasięg czujnika (maksymalny zasięg lidarów wynosi zwykle około 10…15 m). Jak pokazano na rys. 6, odometria AMR została już utracona z powodu dużej przestrzeni. Ponadto magazyny często mają jednolite cechy, co utrudnia korzystanie z czujników wizualnych. W takich scenariuszach IMU i enkodery kół są jedynymi wiarygodnymi źródłami precyzyjnej lokalizacji lokalnej.
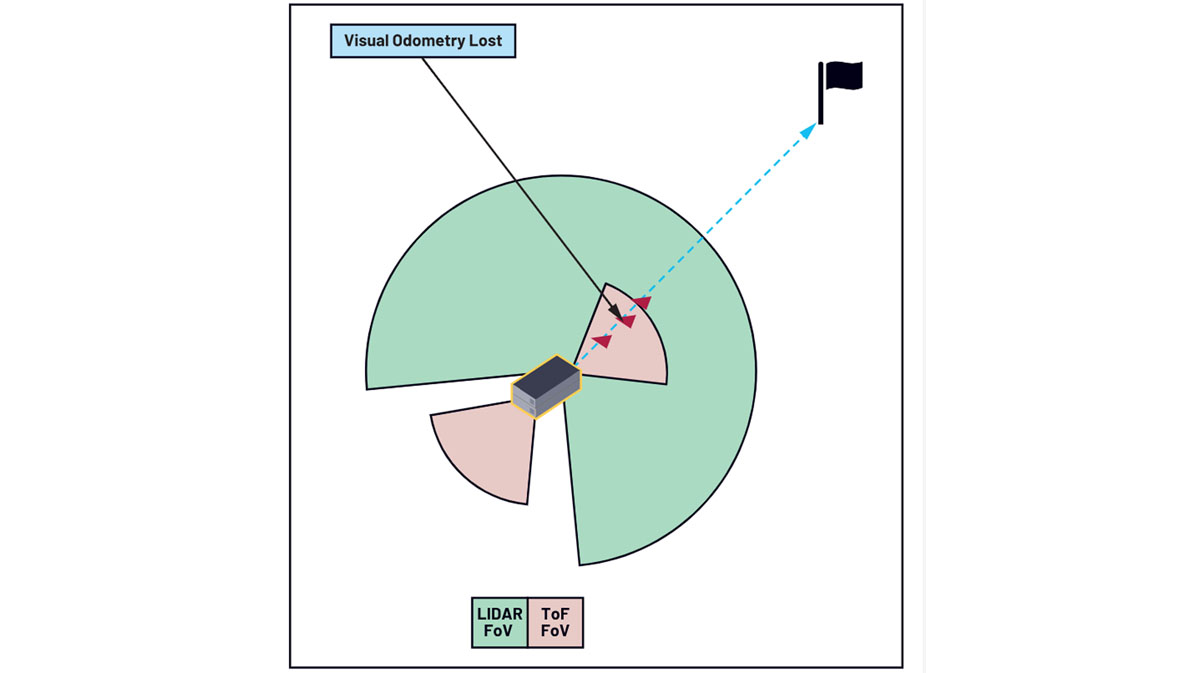
Rys. 6. Ograniczone pole widzenia (FoV) czujników, AMR niezdolny do lokalizacji na dużej otwartej przestrzeni
- Nawigacja na zboczu: Podczas manewrowania na zboczu tradycyjny algorytm SLAM napotyka wyzwanie, gdy opiera się na LIDARZE, ponieważ dane punktowe 2D nie zawierają informacji o nachyleniu. W rezultacie zbocza są błędnie interpretowane jako ściany lub przeszkody, co prowadzi do wyższych kosztów map. W rezultacie, na zboczach konwencjonalne podejścia SLAM z systemami 2D stają się nieskuteczne. IMU pomagają rozwiązać to wyzwanie, wyodrębniając informacje o nachyleniu (rys. 7). Prowadzenie nawigacji na zboczu może więc być kontynuowane.
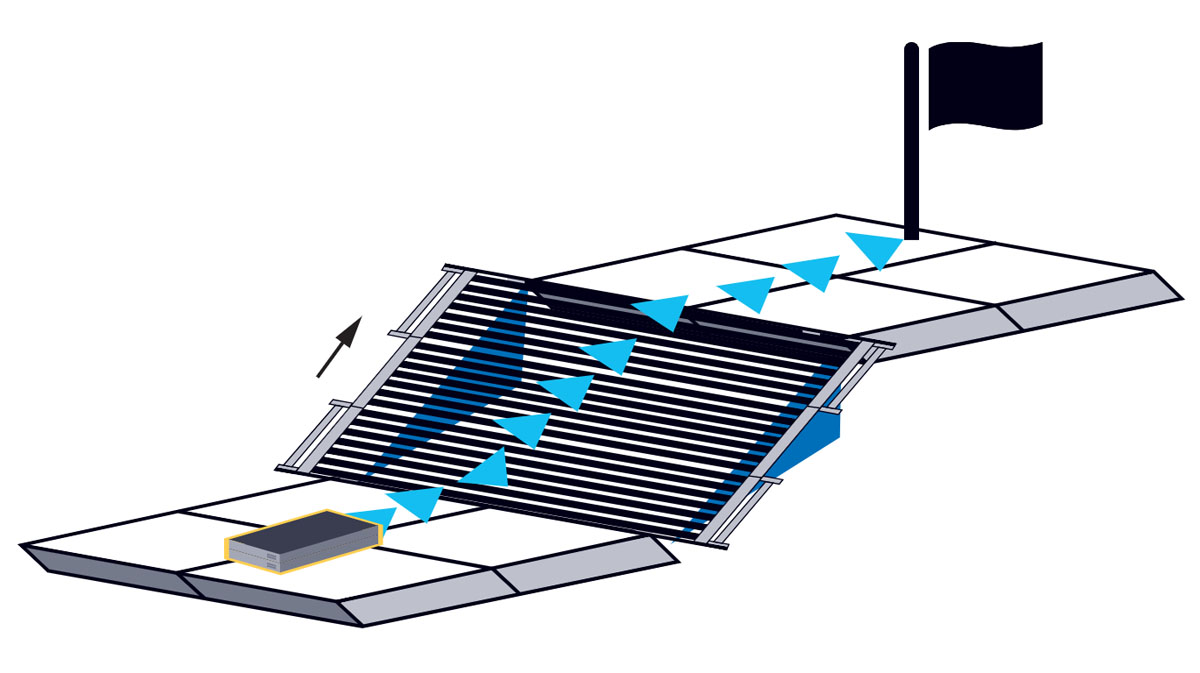
Rys. 7. AMR poruszający się po zboczu
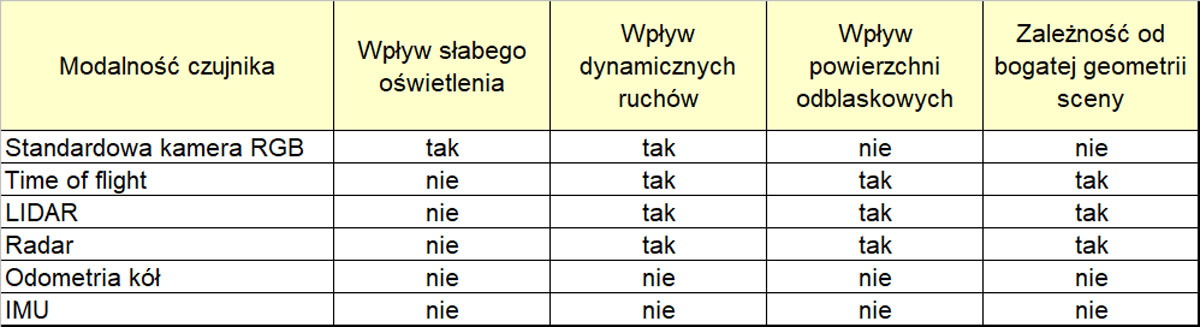
- Czynniki środowiskowe podczas nawigacji: Czujniki LIDAR mogą być wrażliwe na różne czynniki środowiskowe, takie jak światło otoczenia, kurz, mgła i deszcz. Mogą one mogą pogarszać jakość danych z czujników, a tym samym wpływać na wydajność algorytmu SLAM. Podobny wpływ mają odblaskowe powierzchnie i dynamicznie poruszające się obiekty (inne AMR lub pracownicy), co dodatkowo dezorientuje SLAM. W tab. 1 podsumowano wpływ środowiska na różne modalności czujników. IMU mogą niezawodnie działać w różnych środowiskach, co czyni je wszechstronnym wyborem dla robotów mobilnych.
Tab. 1. Szacowanie pozycji i orientacji dla różnych modalności czujników na potrzeby lokalizacji
Jednak żaden czujnik nie jest idealny!
Choć IMU mają swoje zalety, wiążą się z nimi pewne zagrożenia i wyzwania2:
- Szum: Pomiary IMU podlegają szumom, które mogą pogorszyć dokładność nawigacji i sterowania robota. Aby skompensować szumy, IMU mają często zaimplementowane zaawansowane techniki filtrowania, takie jak filtrowanie Kalmana lub FIR.
- Odchylenie: Czujniki IMU gromadzą odchylenia w czasie, co może prowadzić do błędów w szacowaniu orientacji i ruchu. Aby rozwiązać ten problem, do ciągłej aktualizacji odczytów czujników w IMU są stosowane algorytmy szacowania odchylenia.
- Nieliniowość: Czujniki IMU wykazują nieliniowe zachowanie, co może dodatkowo komplikować przetwarzanie i interpretację danych. W celu skompensowania nieliniowości, czujniki te należy je kalibrować. Operacja ta pozwala scharakteryzować zachowanie czujnika i zastosować odpowiednie poprawki.
- Losowe kroczenie: IMU są podatne na zewnętrzne zdarzenia termomechaniczne powodujące błędy w losowym kroczeniu ARW – kąt (w żyroskopie) i losowym zmianom VRW – prędkość (w akcelerometrze).
Jak złagodzić te zagrożenia? Odpowiedzią jest fuzja czujników!
- Jak pomaga fuzja czujników?
- Zwiększa niezawodność.
- Zwiększa jakość danych.
- Poprawia szacowanie stanów niemierzonych.
- Zwiększa zasięg, a tym samym zapewnienia bezpieczeństwo.
- Znaczenie algorytmu fuzji czujników:
- Techniki szacowania stanu, takie jak rozszerzone filtrowanie Kalmana, mogą polaryzacji w czasie regularnej pracy AMR korygować błędy szumu, ARW i niestabilności.
- Błędy nachylenia i przechyłu żyroskopu można usunąć w IMU, mierząc przyspieszenie spowodowane grawitacją Ziemi.
- Algorytm śledzi i koryguje dryft odchylenia oraz koryguje błąd ARW.
- Rozszerzony filtr Kalmana (EKF):
- Obsługuje szacowanie przeszłych, obecnych i przyszłych stanów, nawet jeśli dokładna natura modelowanego systemu jest nieznana. Uproszczony algorytm EKF przedstawiono na rys. 8.
- Pomiar jest obserwowany w czasie, który zawiera gaussowski szum biały lub inne niedokładności i szacuje prawdziwe wartości pomiarów poprzez
- Synchronizację pomiarów między czujnikami
- Przewidywanie pozycji i szacowanie błędów
- Szacowanie i aktualizowanie niepewności przewidywanej wartości.
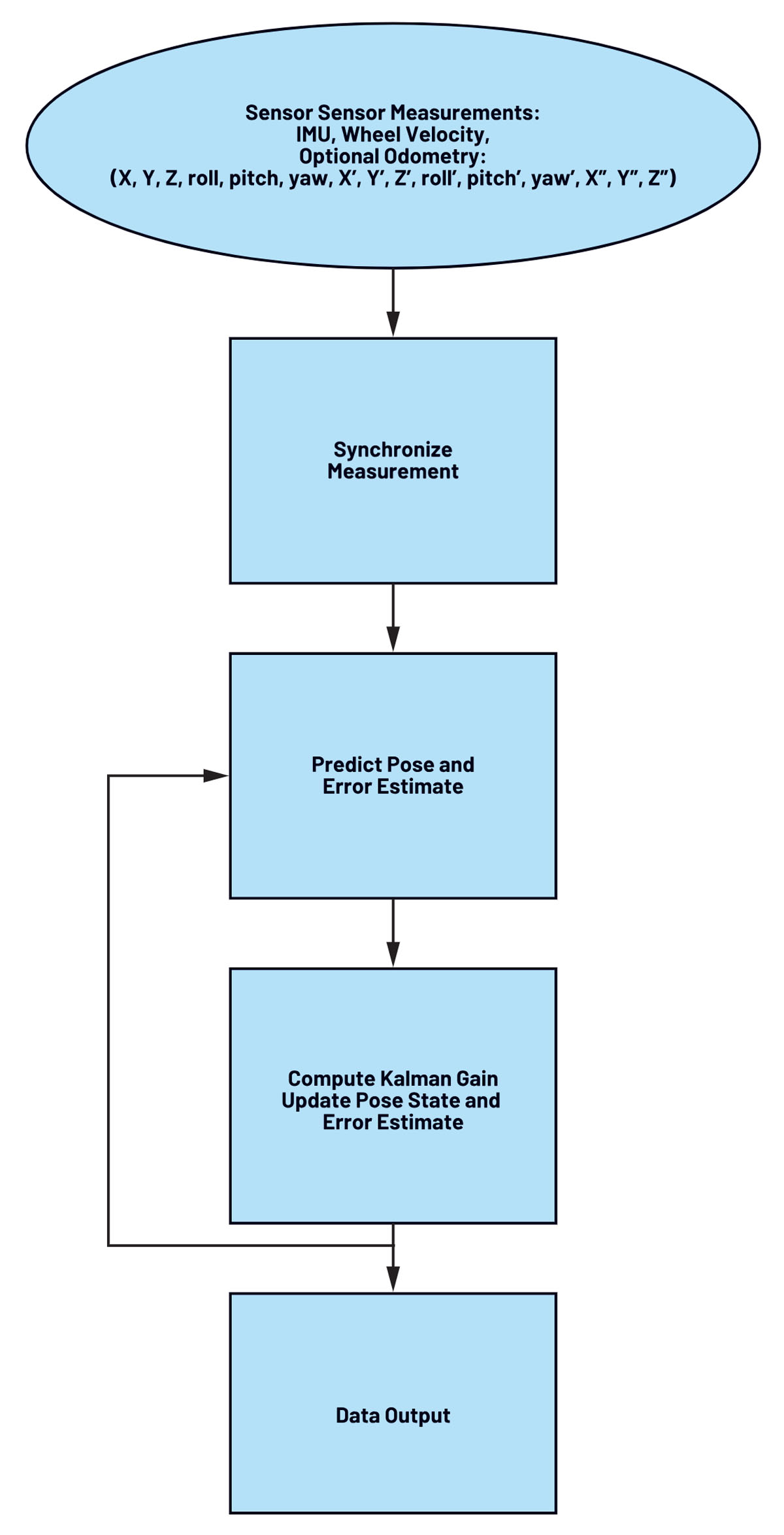
Rys. 8. Algorytm EKF (uproszczony)
- Fuzja czujników:
- W typowym urządzeniu opartym na systemie operacyjnym robota (ROS) czujniki wizyjne wraz z IMU i odometrią koła (rys. 9) są łączone za pomocą popularnego pakietu ROS opartego na otwartym kodzie źródłowym o nazwie robot_localization,3 który w swoim rdzeniu używa algorytmów EKF. Pakiet ten umożliwia fuzję nieograniczonej liczby czujników i różnych danych wejściowych z czujników, takich jak IMU, prędkość kątową i odometrię. Dane wyjściowe pozycji podawane przez robot_localization obejmują trójwymiarowe szacunki pozycji i orientacji robota, a także prędkości liniowe/kątowe i przyspieszenie, które są podawane do algorytmu SLAM. Dane wyjściowe pozycji są wyrażone w postaci
Pose State = (X, Y, Z , roll, pitch, yaw, X˙, Y˙, Z˙, roll˙, pitch˙, yaw˙, X¨, Y¨, Z¨).
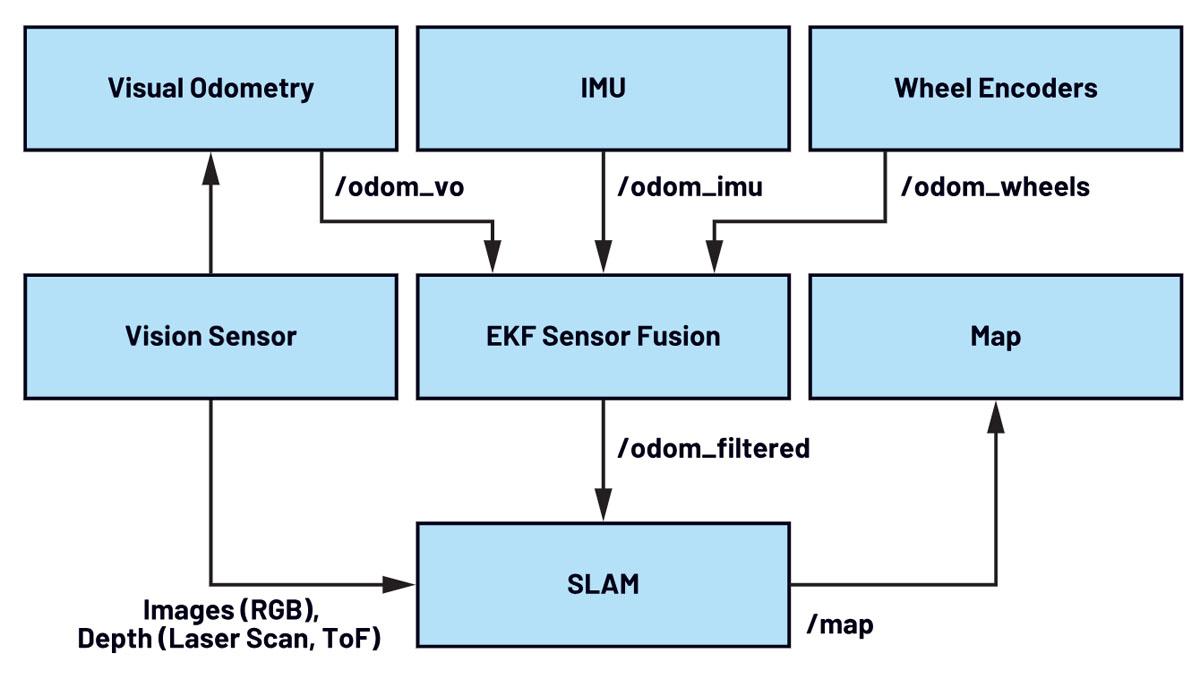
Rys. 9. Typowy system fuzji czujników używających ROS
W jaki sposób życie IMU ADI pomaga rozwiązać te wyzwania?
Firma Analog Devices oferuje kilka jednostek IMU do różnych zastosowań, w tym do robotów mobilnych. Oferowana unikatowa propozycja korzyści to:
- Wbudowana kalibracja: IMU ADI mają w pełni fabrycznie skalibrowany akcelerometr i żyroskop, uwzględniający takie parametry jak czułość, odchylenie, wyrównanie, odchylenie żyroskopu dla przyspieszenia liniowego i akcelerometr. Wbudowane dynamiczne korekty offsetu kompensują zmiany napięcia zasilania, temperatury i zakłóceń magnetycznych wraz z możliwościami redukcji szumów.4 Umożliwia to znaczne skrócenie czasu integracji systemu i kosztów projektowania, usprawniając ogólną implementację dokładnych pomiarów czujników w zastosowaniach przemysłowych w różnych warunkach.
- Przetworniki analogowo-cyfrowe (ADC) o niskim poziomie szumów i wysokiej przepustowości: Rejestrują dane z czujników z dużą dokładnością i wysoką przepustowością, zapewniając niezawodne i responsywne działanie.
- Wysoka precyzja: Jednostki ADI IMU zapewniają dokładne pomiary orientacji, ruchu i prędkości, umożliwiając robotom podejmowanie świadomych decyzji i precyzyjną nawigację w otoczeniu.
- Niskie zużycie energii: Roboty mobilne zazwyczaj działają na bateriach, więc niskie zużycie energii jest niezbędne do zwiększenia ich zasięgu operacyjnego. IMU ADI są bardzo wydajne, minimalizując zużycie energii i maksymalizując żywotność baterii.
- Kompaktowy rozmiar: Aby zmieścić się w ograniczonej przestrzeni robotów mobilnych, jednostki ADI IMU zostały zaprojektowane w kompaktowej obudowie. Pozwala to na łatwą integrację z różnymi konfiguracjami robotów bez uszczerbku dla wydajności.
- Łatwość integracji: Łatwa integracja z systemem sterowania robota jest niezbędna do bezproblemowej pracy. Płytki kuponowe ADI dla IMU, w połączeniu z węzłami ROS o otwartym kodzie źródłowym, umożliwiają łatwą integrację przy budowaniu AMR.
Podsumowanie
Jednostki IMU są niezbędne do lokalizacji w robotach AMR, ponieważ zapewniają szacowanie orientacji i śledzenie ruchu oraz oferują reakcję w czasie rzeczywistym z wysoką częstotliwością aktualizacji, umożliwiając robotom AMR nawigację w dynamicznych środowiskach.
Techniki fuzji czujników, takie jak filtr Kalmana, pozwalają na połączenie innych modalności czujników w celu skompensowania wzajemnych ograniczeń. ADI oferuje szeroką gamę jednostek IMU zaspakajającą specyficzne wymagania różnych zastosowań robotów mobilnych.
_______________________________
1 Shoudong Huang and Gamini Dissanayake. “Robot Localization: An Introduction.” John Wiley & Sons, Inc., August 2016.
2 Oliver J. Woodman. „An Introduction to Inertial Navigation.” University of Cambridge, sierpień 2007.
3 robot_localization 2.6.12 documentation. Tom Moore, 2016.
4 Randy Carver and Mark Looney. “MEMS Accelerometer Calibration Optimizes Accuracy for Industrial Applications.” EE Times, October 2007.
 Moduł Pimoroni MSA301 3DoF Motion Sensor z 3-osiowym akcelerometrem
Moduł Pimoroni MSA301 3DoF Motion Sensor z 3-osiowym akcelerometrem  Uruchamianie zautomatyzowanego testu akcelerometru MEMS przy wykorzystaniu analizatora Digital Discovery i języka Python
Uruchamianie zautomatyzowanego testu akcelerometru MEMS przy wykorzystaniu analizatora Digital Discovery i języka Python  Moduł GNSS firmy Quectel z funkcją nawigacji zliczeniowej
Moduł GNSS firmy Quectel z funkcją nawigacji zliczeniowej