Nakładka na STM32 Nucleo z czujnikami odległości VL53L1X – X-NUCLEO-53L1A1
W ofercie KAMAMI.pl pojawiła się nakładka na płytki Nucleo lub Arduino UNO R3 z czujnikami odległości i gestów – X-NUCLEO-53L1A1. Prezentowany shield została wyposażono w laserowe sensory VL53L1X, wykorzystujące opatentowaną przez STMicroelectronics technologię FlightSense. W dostarczonym zestawie znajdziemy płytkę bazową, dwie płytki z dodatkowymi czujnikami, zestaw dystansów o wysokości 0,25, 0,5 oraz 1 mm oraz dwie płytki ochronne.
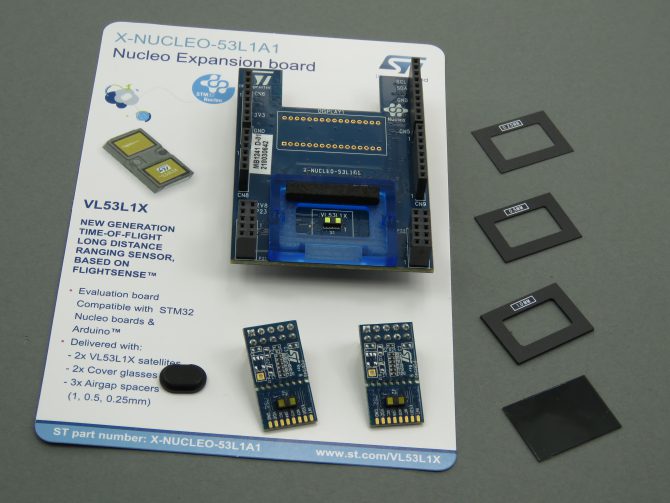
Fot. 1. Zestaw X-NUCLEO-53L1A1
Użyty w płytce sensor VL53L1X to laserowy czujnik odległości nowej generacji, członek rodziny ST FlightSense™. Dysponuje zasięgiem do 400 cm co jest ok. dwukrotnością zasięgu poprzednika (VL53L0X). Sensor jest też najszybszym z rodziny – maksymalna częstotliwość pomiarów wynosi 50 Hz. Czujnik komunikuje się za pomocą interfejsu I2C.
Nakładka główna została wyposażona w jeden czujnik VL53L1X, mocowanie dystansów oraz niezbędne układy i złącza, m.in. złącze Arduino UNO oraz złącze na wyświetlacz.
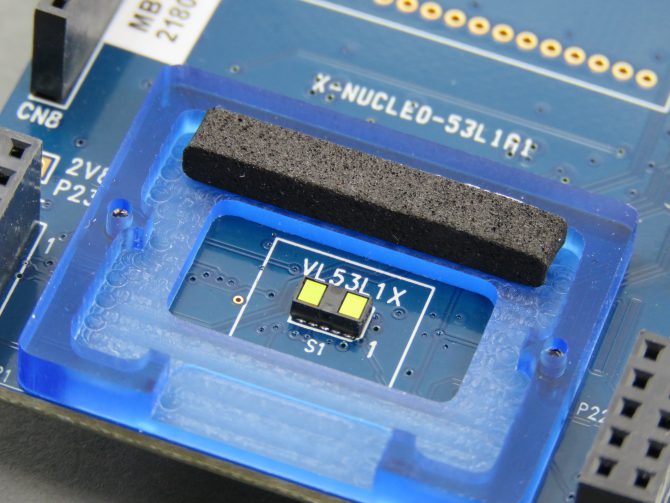
Fot. 2. Czujnik VL53L1X
Ciekawym dodatkiem są wcześniej wspomniane dystanse oraz płytki ochronne. Dodatki te pozwalają na przetestowanie działania obudowanego czujnika i pozwalają na symulację działania czujnika w docelowej aplikacji. Na płytce bazowej znajduje się mocowanie do dystansów oraz szkiełka.
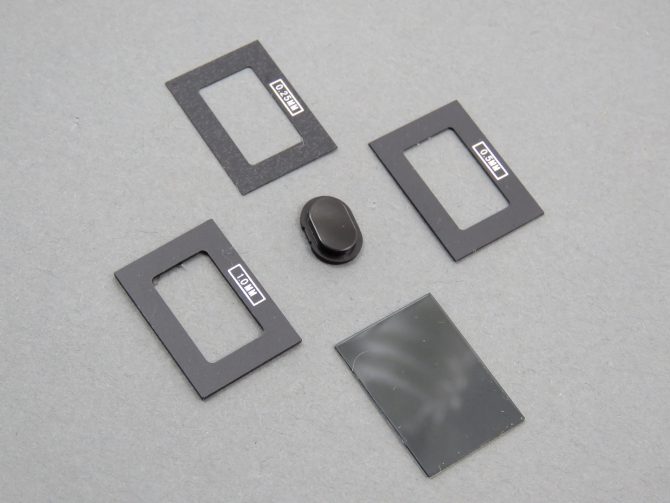
Fot. 3. Płytki ochronne i zestaw dystansów dołączony do zestawu
Dodatkowe czujniki na płytkach dostarczonych z zestawem pozwalają na wykrywanie gestów związanych z kierunkiem ruchu. Można je podłączyć do 10-pinowych złączy znajdujących się za bokach nakładki.
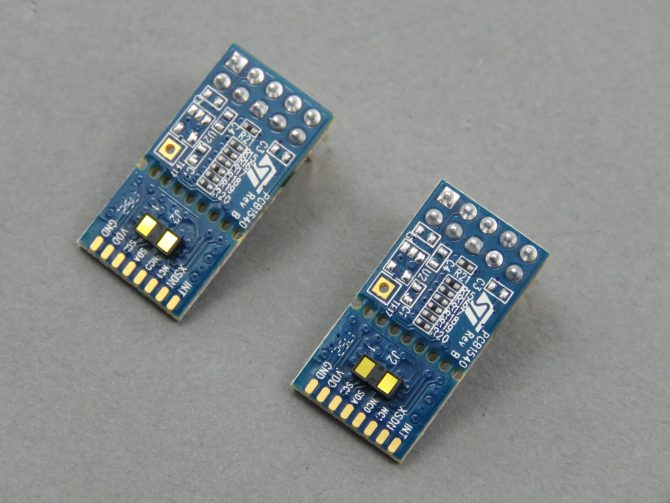
Fot. 4. Płytki z dodatkowymi czujnikami VL53L1X
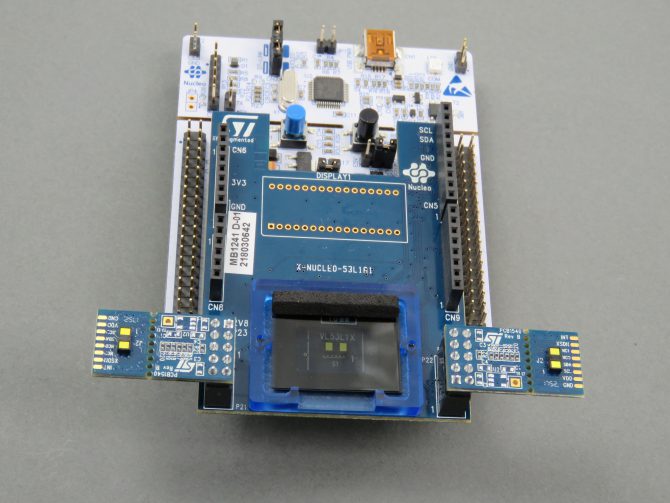
Fot. 5. Zestaw z zainstalowanymi dodatkowymi czujnikami zamontowany na NUCLEO-L476RG
STMicroelectronics przygotowało zestaw sterowników oraz przykładów na płytki NUCLEO-L476RG i NUCLEO-F401RE w paczce programowej X-CUBE-53L1A1. Oprogramowanie demonstracyjne prezentuje pomiar odległości z wykorzystaniem jednego czujnika, oraz pomiar z wykorzystaniem także czujników bocznych. Dane są wypisywane na port szeregowy, z którego można je potem odczytać. Kolejno podawane są: status pomiaru (pomiar jest wiarygodny kiedy status wynosi 0), pomiar odległości w milimetrach, współczynnik odbicia mierzonego obiektu oraz natężenie światła otoczenia.
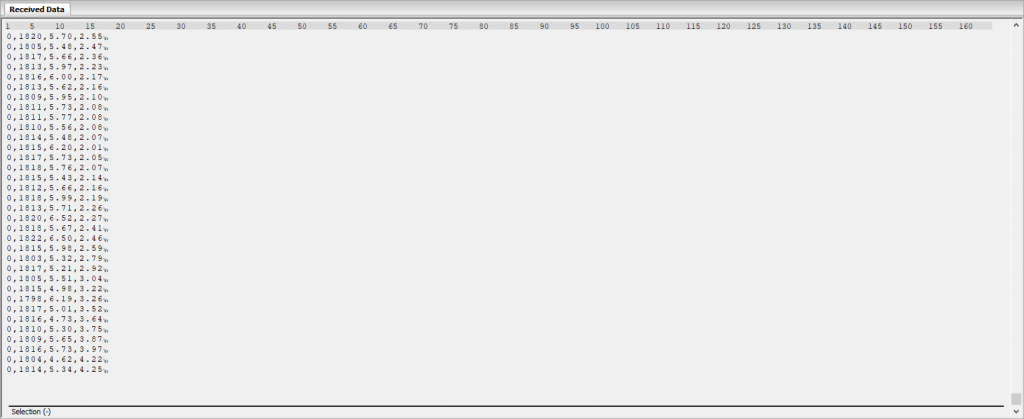
Fot. 6. Wydruk z konsoli – odczyt danych z przykładu na X-NUCLEO-53L1A1
 PM-3133-CPS – inteligentny trójfazowy licznik energii z CANopen
PM-3133-CPS – inteligentny trójfazowy licznik energii z CANopen  Czujnik drgań STMicroelectronics z wbudowaną AI alternatywą dla czujników piezoelektrycznych do monitorowania urządzeń przemysłowych
Czujnik drgań STMicroelectronics z wbudowaną AI alternatywą dla czujników piezoelektrycznych do monitorowania urządzeń przemysłowych  Słabe ogniwa elektroniki: Dlaczego jakość wiązek kablowych i płytek PCB decyduje o Twoim zysku?
Słabe ogniwa elektroniki: Dlaczego jakość wiązek kablowych i płytek PCB decyduje o Twoim zysku? 


![Szymon Robak oprowadza po katowickim Laboratorium Badań Kompatybilności Elektromagnetycznej w Sieć Badawcza Łukasiewicz - Instytucie Sztucznej Inteligencji i Cyberbezpieczeństwa. Zapraszamy na film! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/06/Szymon-Robak-tytulowe.png "https://www.youtube.com/watch?v=gHcP8AajoN4")
![Zapraszamy do obejrzenia filmu i wysłuchania krótkich wypowiedzi prelegentów Hardware Forum 2026 i organizatorów majowej konferencji dla inżynierów z branży elektronicznej: Konrad Bruliński z Lemontech, prof. Krzysztof Kulpa z Politechniki Warszawskiej, Zbigniew Huber z FLC, Ewa Załupska z firmy KROK, Jerzy Kozieł z MPTECH, Grzegorz Potyralski z VIGO Photonics, dr Krzysztof Czuba z Politechniki Warszawskiej, Anna Beata Kalisz Hedegaard z Quantum Security Defence, Adrian Cichosz z Elhurt Dystrybucja Anna Kamińska z Creotech Quantum, oraz Łukasz Jaeszke i Adam Jaeszke z TEK.day [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/05/tytulowe-film-1.png "https://www.youtube.com/watch?v=BgxJVTwYJ-s")