Mikrofon MEMS i STM32 w praktyce
W artykule przedstawiamy mikrofon MEMS MP34DT01 produkowany przez STMicroelectronics oraz sposób jego dołączenia do mikrokontrolera z rodziny STM32.
Akronim MEMS, czyli mikro-układ elektromechaniczny jest kojarzony z technologią wytwarzania mikroukładów z elementami o wymiarach rzędy kilkudziesięciu mikrometrów. Układy MEMS to głównie czujniki wielkości nie elektrycznych: ciśnienia, przyspieszenia, położenia. Są to również miniaturowe pompy i sensory używane w medycynie do celów diagnostycznych, ale też generatory drgań. Jednym z urządzeń MEMS, które zyskały sobie sporą popularność są mikrofony akustyczne. Mikrofony wykonane w tej technologii maja małe wymiary (istotnie mniejsze niż elektretowe odpowiedniki), są tanie i niezawodne.
Pierwszym istotnym zastosowaniem jakie się nasuwa jest stosowanie mikrofonów w smartfonach. Wspomniane już małe wymiary mikrofonów i ich niska cena powodują, że idealnie nadają się do urządzeń, których istotną cechą jest mała wysokość obudowy. Przyjęło się , że im cieńszy smartfon tym lepszy. Można umieścić kilka mikrofonów w różnych miejscach obudowy i za pomocą algorytmów przetwarzania DSP poprawić jakość odbieranego sygnału akustycznego.
Mikrofony MEMS można spotkać tez w innych urządzeniach: tabletach, inteligentnych zegarkach (smartwatch) i urządzeniach sterowanych głosem.
Mikrofon MEMS MP34DT01-M
Mikrofon MEMS MP34DT01-M wykonano w technologii MEMS przez firmę STMicroelectronics, pracuje pn w paśmie akustycznym. Użyta technologia powoduje, że jest ultrakompaktowy i energooszczędny. Najważniejsze cechy charakterystyczne to:
- Pojedyncze napięcie zasilania
- Niski pobór mocy
- Charakterystyka dookólna
- Dynamika (stosunek sygnał/szum) S/N 61dB
- Czułość – 26dbFS
- Maksymalny poziom sygnału akustycznego 120dBSPL
- Cyfrowy interfejs PDM
- Obudowa SMD typu HCLGA (fotografia 1)
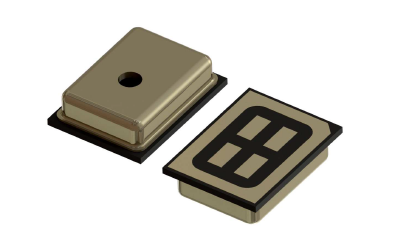 Fot. 1. Mikrofon MEMS MP34DT01-M
Fot. 1. Mikrofon MEMS MP34DT01-M
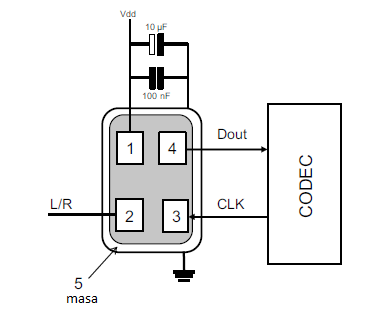 Rys. 2. Połączenie mikrofonu MEMS MP34DT01-M z kodekiem
Rys. 2. Połączenie mikrofonu MEMS MP34DT01-M z kodekiem
Sprzęt do testów
Szybkie przetestowanie działania mikrofonu umożliwia zestaw ewaluacyjny składający się z trzech elementów:
- Płytki ewaluacyjnej X-NUCLEO-CCA02M1
- Płytki ewaluacyjnej z mikrokontrolerem. Możliwe jest użycie jednego z typów płytek z różnymi mikrokontrolerami: NUCLEO-F401RE, NUCLEO-F072RB
- Bezpłatnego oprogramowanie testowego X-CUBE-MEMSMIC1
Na fotografii 3 pokazano zestaw testowy składający się z połączonych modułów NUCLEO-F401RE i X-NUCLEO-CCA02M1. Połączenie jest wykonywane za pomocą złącz standardu ST Morpho. X-NUCLEO-CCA02M1 ma również wyprowadzenia w standardzie Arduino UNO i można go wykorzystać w połączeniu modułem mikrokontrolera sprzętowo zgodnym z tym standardem.
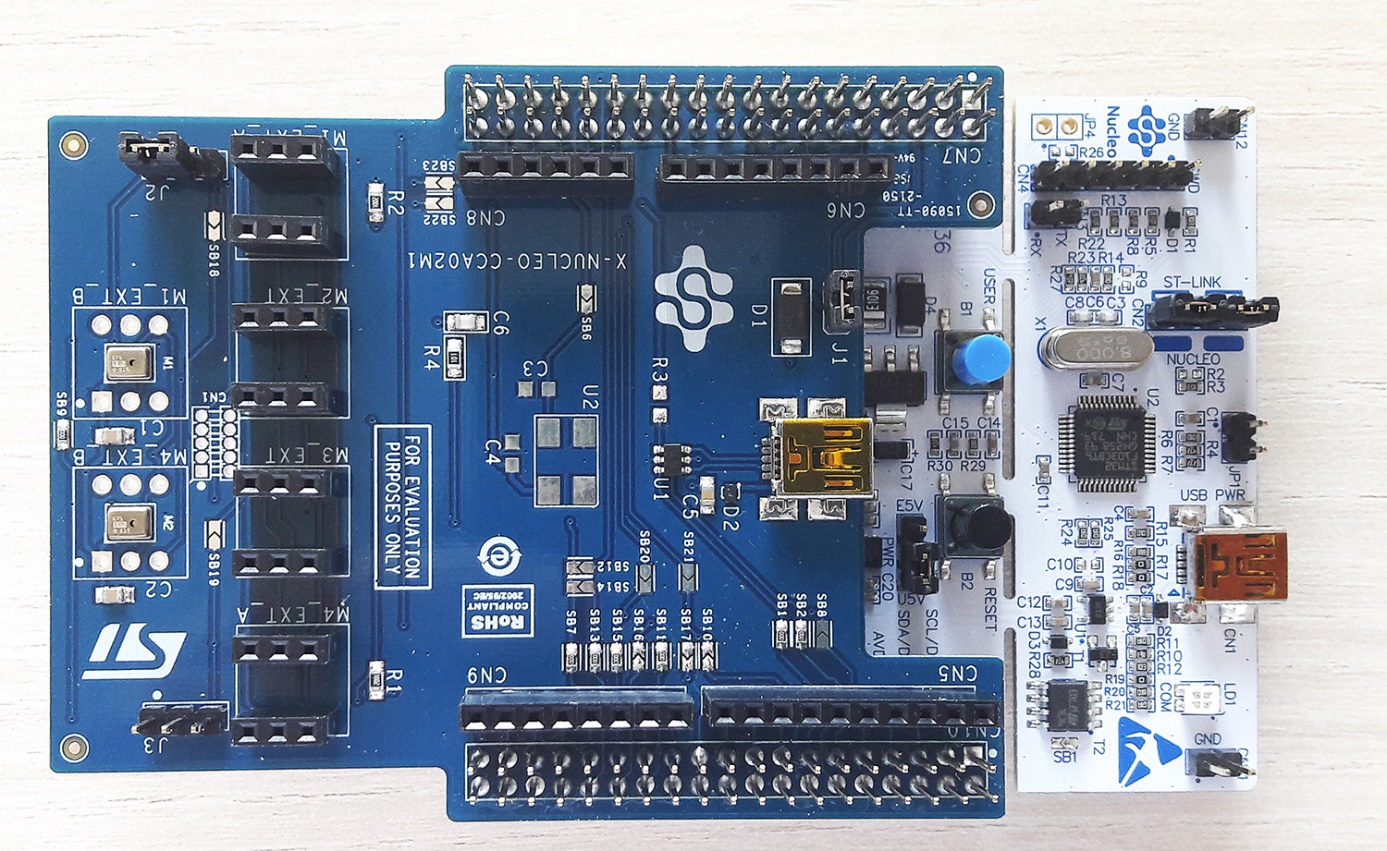 Fot. 3. Moduł X-NUCLEO-CCA02M1 połączony z NUCLEO-F401RE
Fot. 3. Moduł X-NUCLEO-CCA02M1 połączony z NUCLEO-F401RE
X-NUCLEO-CCA02M1 ma na stałe zamontowane 2 mikrofony MP34DT01-M, ale istnieje możliwość dołączenia kolejnych mikrofonów za pomocą dedykowanych złącz zamontowanych na płytce. Przez te złącza można podłączyć do układu mikrofony umieszczone na płytkach ewaluacyjnych STEVAL-MKI155 lub STEVAL-MKI129 (fotografia 4).
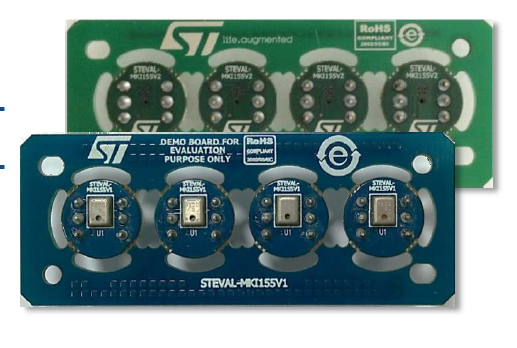 Fot. 4. Płytka rozszerzeń z 4 mikrofonami
Fot. 4. Płytka rozszerzeń z 4 mikrofonami
Oprogramowanie do testów
Oprogramowanie testowe X-CUBE-MEMSMIC1 można pobrać ze strony STMicroelectronics (rysunek 5). Zawiera projekty dla IDE: KEIL, IAR i SW4STM32 i modułów mikrokontrolerów NUCLEO-F401RE, NUCLEO -F072RB lub NUCLEO-L053R8. Projekty zawierają kompletne pliki źródłowe w języku C i można je modyfikować zależnie od potrzeb. W pakiecie X-CUBE-MEMSMIC1 zawarto też skompilowane pliki wynikowe dla każdej z wyżej wymienionych płytek NUCLEO.
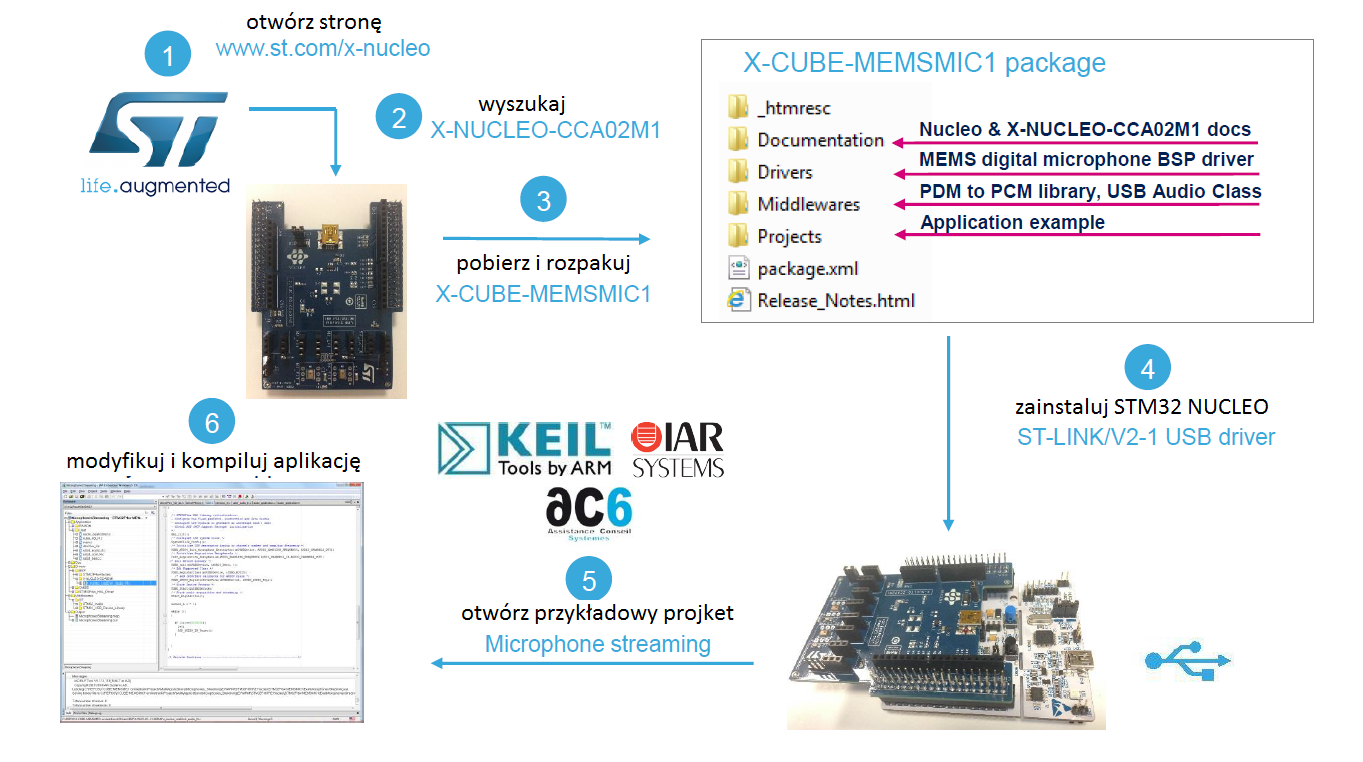 Rys. 5. Pobieranie przykładowych projektów
Rys. 5. Pobieranie przykładowych projektów
X-CUBE-MEMSMIC1 zawiera trzy oddzielne aplikacje: Acoustic_BF, Acoustic_SL i Microphones_Streaming. Dwie pierwsze wykorzystują zaawansowane algorytmy przetwarzania cyfrowych sygnałów reprezentujących sygnały audio z mikrofonów MEMS, a trzecia jest implementacją cyfrowego mikrofonu stereo. Zamieszczone w X-CUBE-MEMSMIC1 projekty zawierają gotowe (prekompilowane) i konfigurowalne biblioteki przetwarzania sygnałów.
Aplikacja Acoustic_BF jest implementacją algorytmu adaptacyjnego przetwarzania w czasie rzeczywistym sygnałów w formacie PCM, lub PDM uzyskanych z dwóch lub czterech mikrofonów MEMS. W wyniku przetwarzania tych sygnałów jest tworzony wirtualny mikrofon kierunkowy wskazujący w określonym kierunku w przestrzeni. Możliwość konfiguracji działania algorytmów pozwala na znalezienie najbardziej odpowiedniego kompromisu pomiędzy jakością uzyskanego sygnału audio, a potrzebnymi zasobami użytego mikrokontrolera. Musi być znana odległość pomiędzy mikrofonami. Ze względu na wymagania algorytmów aplikację Acoustic_BF można uruchomić tylko na module NUCLEO-F401RE z mikrokontrolerem mającym wbudowaną jednostką FPU.
Programowe kształtowanie charakterystyki
Na rysunku 6 została pokazana przykładowa charakterystyka wirtualnego mikrofonu kierunkowego i rozmieszczenie mikrofonów MEMS.
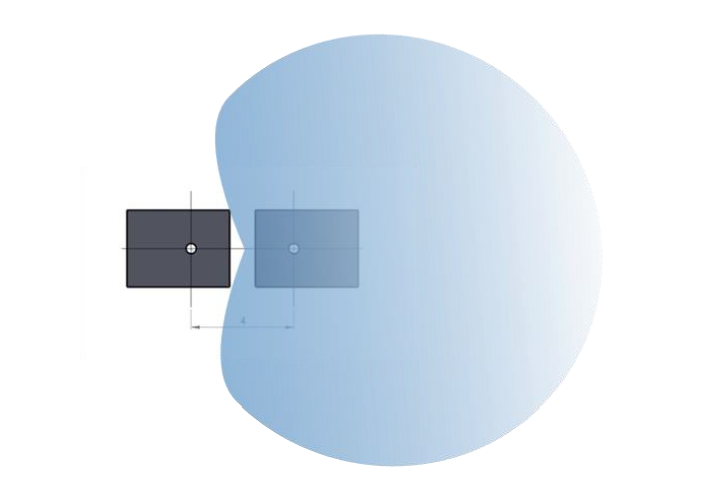 Rys. 6. Charakterystyka wirtualnego mikrofonu kierunkowego
Rys. 6. Charakterystyka wirtualnego mikrofonu kierunkowego
Niebieski obszar to przybliżenie typowej kierunkowej charakterystyki kardioidalnej. Ta charakterystyka kształtuje się na drodze programowej. Cyfrowy sygnał akustyczny z jednego z mikrofonów opóźnia się i potem sumuje z nie opóźnionym sygnałem z drugiego mikrofonu – rysunek 7. Wartość tego opóźnienia zależy do odległości pomiędzy mikrofonami i jest wyliczany z zależności opóźnienie=d/c. gdzie d= odległość pomiędzy mikrofonami, a c prędkość dźwięku w powietrzu.
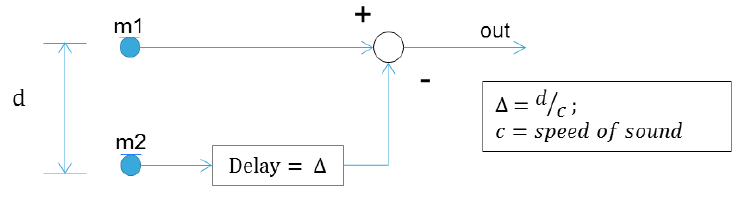 Rys. 7. Cyfrowe kształtowanie charakterystyki kardioidalnej
Rys. 7. Cyfrowe kształtowanie charakterystyki kardioidalnej
Aplikacje
Aplikacja AcousticSL zawiera implementację algorytmu lokalizacji źródła dźwięku w czasie rzeczywistym. Są tu wykorzystywane sygnały cyfrowe z dwóch lub czterech mikrofonów MEMS po to by oszacować położenie w przestrzeni głównego źródła dźwięku. Wykrywanie położenia opiera się on na trzech różnych algorytmach DOA (Direction Of Arrival):
- Algorytm krzyżowej korelcji XCORR. Wykonuje się on w dziedzinie czasu, używa mniejszych zasobów mikrokontrolera, ma niższą rozdzielczość i wymaga umieszczenia mikrofonów w większych odległościach od siebie.
- Algorytm GCC-PHAT. Wykonuje się w domenie częstotliwości, używa stosunkowo dużych zasobów mikrokontrolera, ma wysoką rozdzielczość
- Algorytm BMPH. Wykonuje się w domenie częstotliwości, zapotrzebowanie na zasoby mikrokontrolera mieszczą się pomiędzy wymaganiami algorytmów XCORR i GCC-PATH
Rozmieszczenie mikrofonów dla aplikacji Acoustic SL pokazano na rysunku 8.
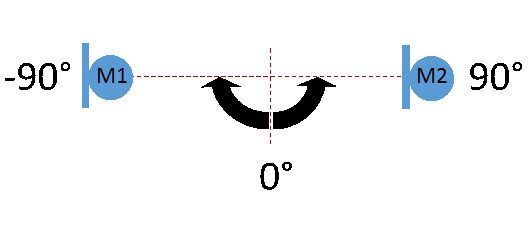 Rys. 8. Rozmieszczenie mikrofonów
Rys. 8. Rozmieszczenie mikrofonów
W przypadku algorytmu XCORR odległość pomiędzy mikrofonami musi umożliwiać wykonanie opóźnienia równego czasowi odpowiadającemu okresowi próbkowania. Dla algorytmu GCC-PATH teoretycznie nie ma ograniczeń odległości.
Trzecią, najprostszą aplikację Microphones_Straming, przeznaczono do szybkiego testowania działania modułu ewaluacyjnego X-NUCLEO-CCA02M1 W połączeniu z jedną z dedykowanych płytek NUCLEO. W naszym przypadku będzie to NUCLEO-F401RE. Po wgraniu do pamięci mikrokontrolera oprogramowania zestaw będzie można połączyć z komputerem przez złącze USB i będzie pracował jako standardowy wielokanałowy mikrofon USB. Do testów prawidłowego działania mikrofonu wykorzystamy popularny bezpłatny program Audacity.
Zaczynamy od wgrania do modułu mikrokontrolera piku z rozszerzeniem .hex skompilowanego projektu zawartego w katalogu STM32CubeExpansion_MEMSMIC1_V3.0.0/Projects/Multi/Applications/Microphone_Streaming/Binary/STM32F401RE-Nucleo. Po zaprogramowaniu mikrokontrolera łączymy zestaw z komputerem przez złącze USB zamontowane na module X-NUCLEO-CCA02M1 – rysunek 9.
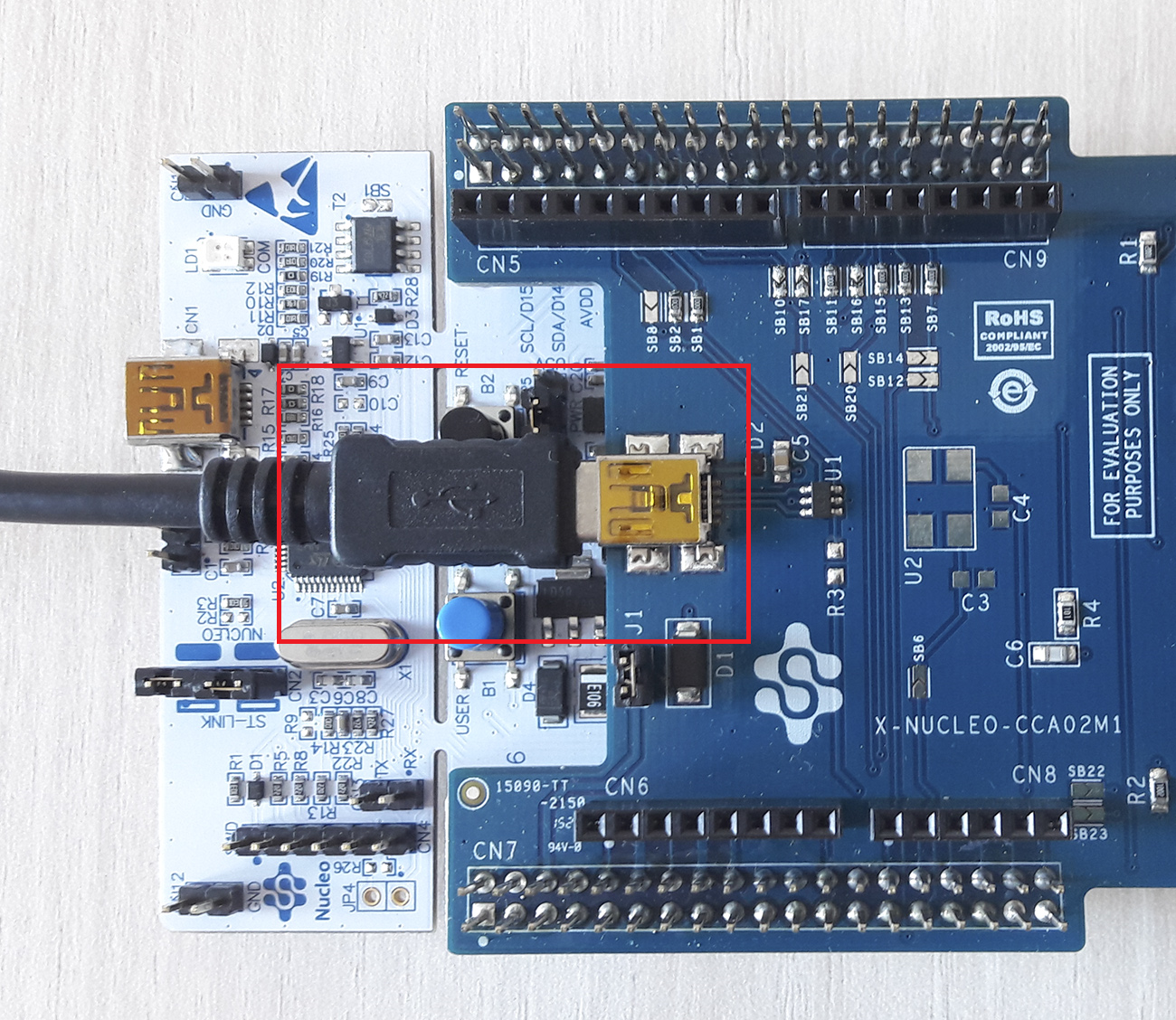 Rys. 9. Podłączenie Kabla USB Do Złącza Modułu X-NUCLEO-CCA02M1
Rys. 9. Podłączenie Kabla USB Do Złącza Modułu X-NUCLEO-CCA02M1
Działanie zestawu
Jeżeli mikrokontroler został prawidłowo zaprogramowany, to po podłączeniu do komputera moduł zostanie wykryty jako stereofoniczny mikrofon cyfrowy. System Windows pobierze sobie przez Internet potrzebne sterowniki i w menadżerze urządzeń w zakładce „Kontrolery dźwięku, wideo i gier” pojawi się urządzenie STM32 AUDIO Streaming in FS Mode, tak jak to zostało pokazane na rysunku 10 .
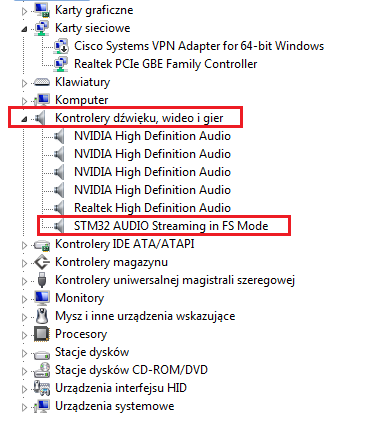 Rys. 10. Urządzenie STM32 AUDIO Streaming in FS Mode
Rys. 10. Urządzenie STM32 AUDIO Streaming in FS Mode
Jak już wspomniałem do dalszych testów wykorzystamy Audacity. Ten pakiet programowy można pobrać w wersji instalacyjnej i wersji portable (działa bez instalacji). Po uruchomieniu programu musi on znaleźć (wykryć) nasz mikrofon. Wykonujemy polecenie Transportuj -> Skanuj ponownie urządzenie dźwiękowe – rysunek 11.
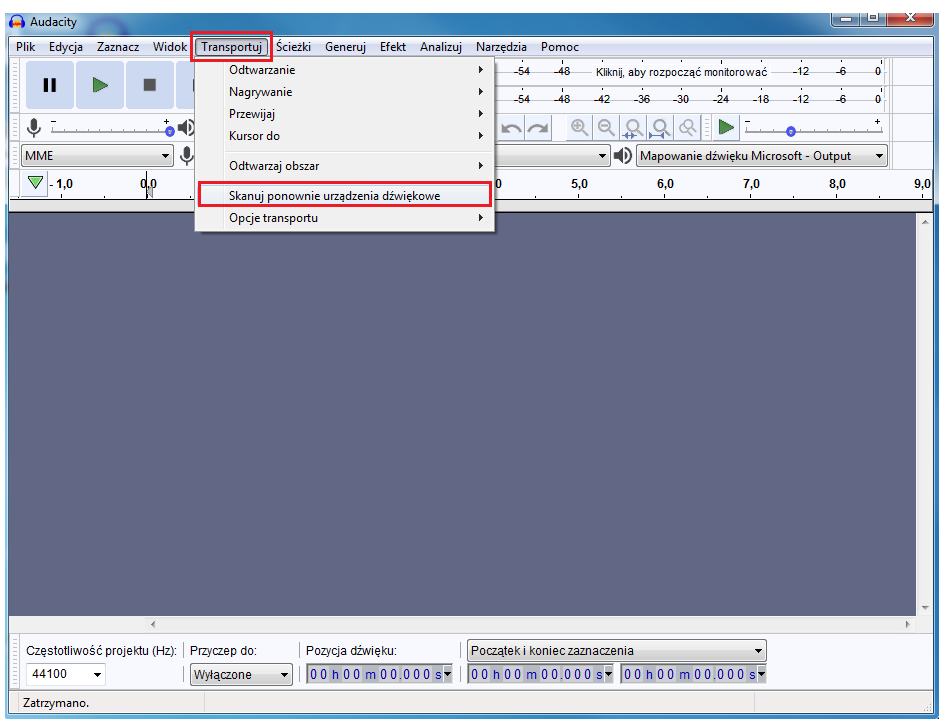 Rys. 11. Wykrywanie mikrofonów MEMS
Rys. 11. Wykrywanie mikrofonów MEMS
Wykryty mikrofon MEMS powinien się pojawić na liście MME jako Mikrofon (STM32 AUDIO Streaming – rysunek 12.
 Rys. 12. Wykrycie mikrofonu MEMS
Rys. 12. Wykrycie mikrofonu MEMS
W trakcie nagrywania trzeba ustawić poziom sygnału z mikrofon MEMS na wartość zapobiegającą przesterowaniu toru i powstawaniu zniekształceń – rysunek 13.
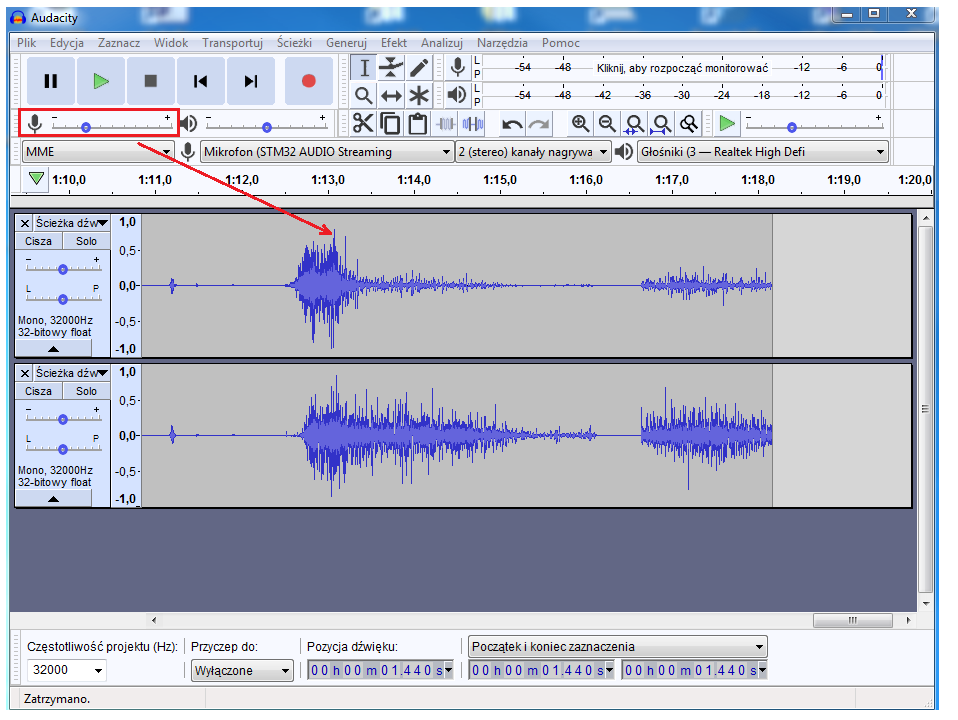 Rys. 13. Nagrywanie sygnału i regulacja poziomu sygnału z mikrofonów MEMS
Rys. 13. Nagrywanie sygnału i regulacja poziomu sygnału z mikrofonów MEMS
Wyregulowany tor pozwala na nagrywanie stereofonicznego dźwięku dobrej jakości. Pokazany tu tor audio jest przykładem prostej i taniej implementacji cyfrowego mikrofonu MEMS.
 Tester baterii GBM-3300 marki GW Instek
Tester baterii GBM-3300 marki GW Instek  NCS-PX133P-J2-J
NCS-PX133P-J2-J  Bezpieczne kleje anaerobowe, dwuskładnikowe kleje strukturalne oraz innowacyjne systemy dozowania w ofercie Semicon
Bezpieczne kleje anaerobowe, dwuskładnikowe kleje strukturalne oraz innowacyjne systemy dozowania w ofercie Semicon