





Zasady projektowania sensorów w klawiaturach dotykowych
Technologie dotykowe umożliwiające wykrycie obecności ludzkiej dłoni są elementem coraz częściej spotykanym w urządzeniach elektronicznych. Wykorzystuje się je do realizacji interfejsów zapewniających interakcję między urządzeniem a jego użytkownikiem. Rozwiązania te stały się do tego stopnia powszechne, że zaczęły wypierać popularne do tej pory interfejsy oparte na podzespołach mechanicznych. Proces ten wynika z licznych zalet technologii dotykowych, które dają możliwość wykonania interfejsu użytkownika bardziej niezawodnego, funkcjonalnego i ergonomicznego w porównaniu do analogicznych rozwiązań o charakterze mechanicznym.
Opracowanie dotykowego interfejsu użytkownika wymaga realizacji fizycznej warstwy sensorowej oraz implementacji (sprzętowej lub programowej) algorytmu interpretującego sygnały z niej pochodzące. Drugi z wymienionych elementów można wykonać na wiele sposobów, ponieważ istnieje wiele firm oferujących swoje produkty w tym zakresie. Do czołowych producentów należą między innymi firmy Freescale, STMicroelectronics i Atmel, które w swojej ofercie mają zarówno zintegrowane kontrolery do obsługi klawiatur dotykowych, jak również pakiety oprogramowania umożliwiające rozbudowanie funkcji mikrokontrolerów o interfejs dotykowy. Inaczej ma się sprawa pierwszego elementu, który obejmuje zaprojektowanie elektrod czujników. W tym wypadku nie ma możliwości zastosowania gotowego rozwiązania, gdyż musi ono zostać przygotowane i indywidualnie dopasowane do danego urządzenia. Prawidłowa realizacja warstwy sensorowej wymaga od projektanta znajomości pewnych zasad, których przestrzeganie pozwoli uniknąć wystąpienia zjawisk mogących mieć negatywny wpływ na poprawne działanie interfejsu dotykowego.
Proces polegający na wykrywaniu obecności ludzkiego ciała w oparciu o dotyk w najprostszej postaci przedstawić można jako kondensator (rys. 1).
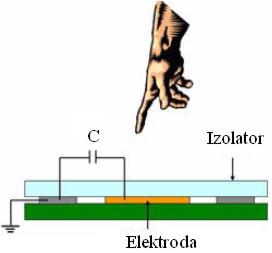
Rys. 1. Wizualizacja metody zbliżeniowej wykrycia obecności palca
Zgodnie ze wzorem opisującym pojemność kondensatora (rys. 2), wartość ta jest zależna głównie od odległości między jego okładkami, którymi w tym wypadku są skóra oraz elektroda (warstwa sensorowa na powierzchni urządzenia oraz doprowadzone do niej ścieżki).
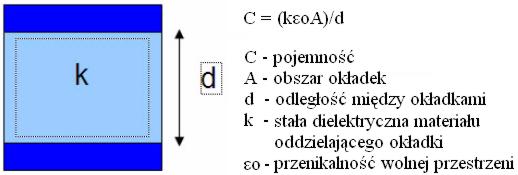
Rys. 2. Czynniki mające wpływ na pojemność kondensatora i równanie opisujące ich zależności
Ogólne wnioski wynikające z tego faktu są następujące:
• im większy jest wykrywany obiekt, tym większa jest powierzchnia odpowiadającej mu okładki kondensatora, a więc zwiększa się wartość pojemności,
• im większa jest powierzchnia elektrody, tym większa jest powierzchnia odpowiadającej jej okładki kondensatora, co również skutkuje zwiększeniem pojemności,
• zmiana pojemności jest odwrotnie proporcjonalna do odległości między elektrodą i wykrywanym obiektem,
• rodzaj materiału izolatora wpływa na czułość wykrycia obiektu,
• sąsiadujące z elektrodą ścieżki i powierzchnie mogą tworzyć tak zwaną pojemność pasożytniczą i mieć wpływ na pojemność elektrody sumując się z jej wartością początkową (rys. 3).
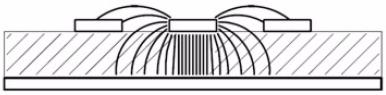
Rys. 3. Wzajemnie oddziaływanie między elektrodami i elementami sąsiednimi
Pierwszym z elementów, na który należy zwrócić uwagę podczas projektowania elektrod w aplikacjach dotykowych jest sposób doprowadzenia ścieżek do pól sensorowych elektrod. Jest to istotna kwestia, ponieważ każda ścieżka posiada pewną pojemność, indukcyjność oraz rezystancję (rys. 4). Wartości te zależą głównie od długości i szerokości ścieżek oraz wpływu pola elektromagnetycznego wytwarzanego przez otaczające elementy.
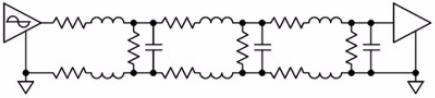
Rys. 4. Schemat elektryczny ścieżki na płytce PCB
Szczególnie istotnym parametrem ścieżek w kontekście aplikacji z interfejsem dotykowym jest wartość pojemności, która powinna być możliwie mała. Aby osiągnąć ten cel sugerowane jest:
• utrzymywanie szerokości ścieżek na poziomie 5-7 milsów,
• zachowanie prześwitu co najmniej 10 milsów między sąsiadującymi ścieżkami tej samej warstwy płytki (rys. 5),
• poprowadzenie ścieżek prostopadle w sąsiadujących warstwach płytki (rys. 5),
• umieszczanie ścieżek na innej warstwie płytki niż pola sensorowe elektrod (rys. 6).
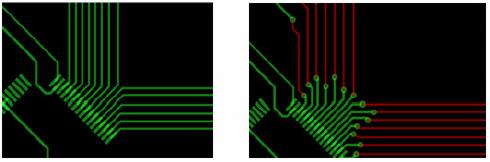
Rys. 5. Sposób prowadzenia ścieżek
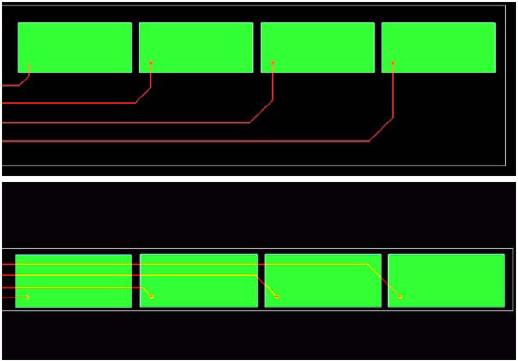
Rys. 6. Sposób rozmieszczania elektrod i ich doprowadzeń
Kolejnym istotnym elementem wymagającym uwagi są pola sensorowe elektrod. W celu ich optymalnego zaprojektowania zaleca się:
• stosowanie pól o wielkości zbliżonej do powierzchni dotyku ludzkiego palca,
• używanie pól o kształcie kwadratu, prostokąta lub koła (rys. 7),
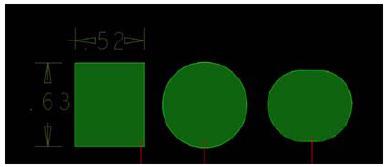
Rys. 7. Najczęściej stosowane kształty pól przycisków zbliżeniowych
• zachowanie możliwie dużego prześwitu między polami w celu uniknięcia wzajemnego wpływania na siebie,
• umieszczanie pól przycisków na osobnej warstwie płytki, co umożliwi zminimalizowanie zakłóceń pochodzących od sąsiednich elementów,
• unikanie umieszczania obok i pod elektrodami innych komponentów elektronicznych,
• używanie przede wszystkim elementów w obudowie SMD, które w przeciwieństwie do komponentów przewlekanych nie wymagają odwiertów ingerujących w spójność powierzchni płytki.
Następnym zagadnieniem, które warto poruszyć, jest sposób użycia poligonów z masą. W aplikacjach z interfejsem dotykowym stosowanie ich nie jest obligatoryjne. Decydując się na zastosowanie poligonów należy zachować ostrożność, gdyż ich obecność może pomóc w tłumieniu zakłóceń zewnętrznych, jednak niewłaściwe ich użycie może również zmniejszyć czułość elektrod. Rekomendacje dotyczące wykorzystania poligonów masowych:
• stosowanie poligonów wokół pól elektrod lub pod nimi jest wskazane w przypadku malej odległości między elektrodami (mniej niż 50 milsów) lub podczas wykorzystania klawiatury matrycowej,
• unikanie sąsiedztwa elektrod i pełnych poligonów, których pojemność może tworzyć duży offset podczas pomiaru. Optymalną strukturą poligonu jest forma kraty, która umieszczona na spodniej warstwie płytki spełnia rolę filtru jednocześnie nie wnosząc do układu pomiarowego pasożytniczej pojemności (rys. 8).

Rys. 8. Kraciasta struktura poligonu
• używanie poligonów o pełnym wypełnieniu dla cyfrowej i analogowej części urządzenia.
Przykładową aplikację uwzględniającą wszystkie wymienione postulaty przedstawiono na rys. 9.
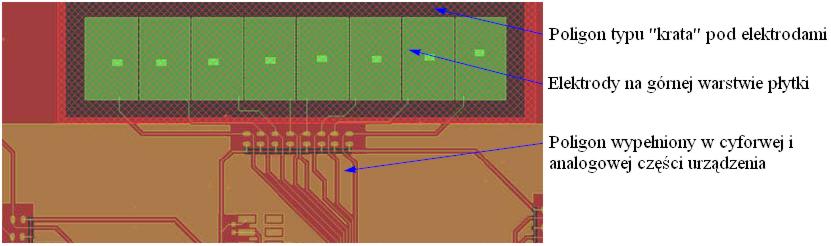
Rys. 9. Wykorzystanie poligonów w interfejsie dotykowym
Stosując się do wszystkich wymienionych sugestii dotyczących projektowania elektrod sensorowych można przystąpić do budowy interfejsu użytkownika opartego na technologii dotykowej. Najczęściej spotykanym składnikiem takiego interfejsu są pojedyncze przyciski. Gdy funkcjonalność przycisków jest niewystarczająca warto zastosować klawiaturę matrycową (rys. 10), w której interpretacja dotkniętego pola sensorowego jest dokonywana na podstawie odczytu dwóch lub więcej elektrod. Analogicznie do pojedynczych przycisków kształt i geometria elementów klawiatury powinny być dopasowane do wielkości ludzkiego palca.
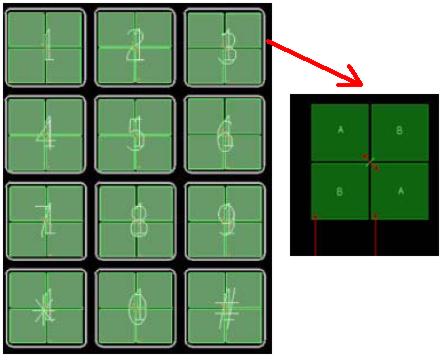
Rys. 10. Klawiatura dotykowa
Innymi często spotykanymi w interfejsach dotykowych strukturami są suwaki. Służą one do odczytu naciśniętego miejsca oraz prędkości i kierunku, w którym się ono przesuwa. Suwak zazwyczaj składa się z 8 przylegających do siebie przycisków. Przykład suwaka jednoosiowego przedstawiono na rys. 11, natomiast suwak obrotowy przedstawiono na rys. 12.

Rys. 11. Suwaki jednoosiowe

Rys. 12. Suwak obrotowy
W artykule przedstawiono podstawowe informacje z zakresu projektowania elektrod do interfejsów dotykowych. Opisane zasady i wskazówki posłużyć mogą jako pomoc przy realizacji własnego rozwiązania z tego zakresu.
[1] www.freescale.com AN3863 – Designing touch sensing electrodes, 09/2010
 Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?
Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?  Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii
Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii  Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



