





STM32VLDISCOVERY: obsługa modułu GPS Fastrax IT500
Oprogramowanie
Oprogramowanie dla mikrokontrolera STM32 zostało napisane przy wykorzystaniu środowiska programistycznego Keil µVision oraz bibliotek STM32F10x StdPeriph Lib w wersji 3.5.0. Na rysunku 5 przedstawiono schemat blokowy programu.
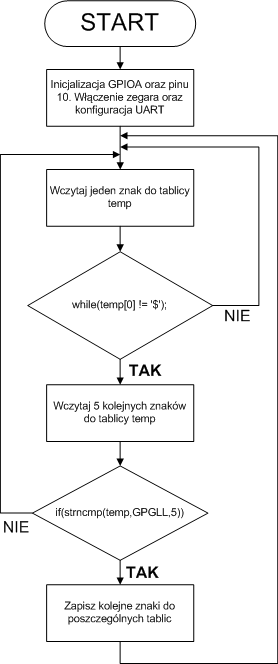
Rys. 5. Schemat blokowy programu
Po uruchomieniu programu w pierwszej kolejności mikrokontroler STM32 konfiguruje wyprowadzenie PA10. Następnie konfigurowany jest interfejs komunikacyjny UART. Parametry pracy są zgodne z parametrami ustawionymi w module GPS:
- Baudrate 9600,
- 8 bitów danych,
- 1 bit stopu,
- Brak parzystości.
Dzięki temu wyprowadzenie PA10 może służyć do odbioru danych z modułu GPS. Następnie mikrokontroler oczekuje na odebranie tychże danych (są one kodowane zgodnie z protokołem NMEA0183). Bajt po odebraniu wpisywany jest do tablicy temp[] w miejsce o indeksie 0. Jeśli zawarta w nim informacja zostanie zinterpretowana jako znak inny niż ‘$’, następnych pięć odebranych bajtów wpisywanych jest pod kolejne indeksy tablicy temp[]. Znaki te symbolizują identyfikator zdania. Jeśli identyfikator nosi nazwę GPGLL, oznacza to, że dane, które po nim wyśle moduł GPS zawierają informację o czasie i pozycji GPS. W tej sytuacji kolejne bajty są wczytywane do tablic o nazwach time[], n[] oraz e[]. W tablicach tych znajdują się odpowiednio: aktualny czas, szerokość geograficzna i długość geograficzna.
Warto przyjrzeć się bliżej wybranym funkcjom programu. Część kodu została opisana w książce [1] i nie będzie powtórnie opisywana w tym opracowaniu.
W listingu 1 przedstawiono ciało funkcji getch(), która odpowiada za sczytywanie poszczególnych znaków do zmiennej. Docelowo funkcja wczytuje wartości do poszczególnych tablic. Dodatkowo funkcja zamienia każdy znak ‘,’ na znak ‘|’.
Listing 1.
char getch(void)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET)
{
}
tmp = USART_ReceiveData(USART1);
if(tmp == ’,’)
{
tmp = ’|’;
}
else
return tmp;
}
W listingu 2 pokazano kod będący „sercem” całego programu. Odpowiada on za odczytywanie danych z modułu GPS i ich interpretację.
Listing 2.
while(1)
{
while((temp[0]=getch()) != ’$’);
for(i=0; i
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






