





STM32Butterfly: współpraca z 3-osiowym czujnikiem przyspieszenia MEMS (LIS35D)
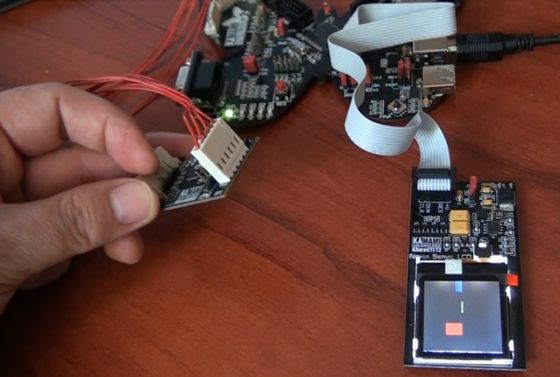
W artykule przedstawiamy efektowną aplikację pozwalającą zapoznać się z akcelerometrem LIS35DE firmy STMicroelectronics, który mierzy przyspieszenie wzdłuż trzech osi. Aplikacja jest przygotowana dla zestawu uruchomieniowego STM32Butterfly2 (z mikrokontrolerem STM32F107), modułu KAmodTFT2 oraz modułu KAmodMEMS2, który jest wyposażony w układ LIS35DE. Sposób dołączenia modułów do zestawu uruchomieniowego opisano w pliku main.c.
Obsługa wyświetlacza
Wyświetlacz modułu KAmodTFT2 jest wyposażony w kontroler PCF8833. Komunikacja z kontrolerem odbywa się przez interfejs szeregowy SPI. Niestety ramka danych ma 9 bitów, co uniemożliwia wykorzystanie sprzętowego interfejsu SPI wbudowanego w mikrokontroler STM32 (tu do wyboru jest wyłacznie 8 lub 16 bitów). Wpływa to negatywnie na wydajność, ale do naszej aplikacji w zupełności wystarczy.
Obsługa akcelerometru
Układ LIS35DE jest wyposażony w interfejsy I2C i SPI, linie tych interfejsów w module KAmodMEMS2 zostały wyprowadzone na wygodne w użyciu złącza. W aplikacji wykorzystałem interfejs SPI. Odczyt rejestrów układu polega na wysłaniu w pierwszym bajcie:
- bitu 0 o wartości 1 (odczyt),
- bitu 1 o wartości 0 lub 1 (dla wartości 1 adres rejestru będzie automatycznie inkrementowany)
- bitów 2..7 zawierających adres rejestru
Następnie należy odczytać zawartości rejestrów. Zapis przebiega analogicznie z tą różnicą, że bajt 0 ma mieć wartość 0. Poniżej przedstawiam funkcje realizujące zapis i odczyt rejestrów.
#define LIS35_WRITE 0
#define LIS35_READ 0x80
#define LIS35_ADDR_NO_INC 0
#define LIS35_ADDR_INC 0x40
...
void LIS35_ReadRegister(char addr,char * v)
{
SPI_CS_Enable();
SPI_Transmit(LIS35_READ|LIS35_ADDR_NO_INC|addr);
*v=SPI_Receive();
SPI_CS_Disable();
}
void LIS35_WriteRegister(char addr,char v)
{
SPI_CS_Enable();
SPI_Transmit(LIS35_WRITE|LIS35_ADDR_NO_INC|addr);
SPI_Transmit(v);
SPI_CS_Disable();
}
Po dołączeniu zasilania akcelerometr jest w stanie power-down, funkcja inicjalizująca przełącza układ w tryb active przez ustawienie bitu PD w rejestrze CTRL_REG1 oraz odblokowuje wszystkie trzy osie akcelerometru przez ustawienie bitów ZEN, YEN i XEN w tym samym rejestrze.
char InitializeLIS35(void)
{
char RegVal, LIS35Settings;
//Reset LIS35 configuration
LIS35_RebootMemory();
LIS35_ReadRegister(LIS35_REG_CR1, &RegVal);
//Power up
LIS35Settings = LIS35_REG_CR1_XEN | LIS35_REG_CR1_YEN | LIS35_REG_CR1_ZEN | LIS35_REG_CR1_ACTIVE;
LIS35_WriteRegister(LIS35_REG_CR1, LIS35Settings);
LIS35_ReadRegister(LIS35_REG_CR1, &RegVal);
//Check whether power up is set
if (RegVal == LIS35Settings) return LIS35_OK;
return LIS35_ERROR;
}
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






