





02.07.2012
ZL31ARM: wskaźnik przyspieszenia 3D z czujnikiem MEMS LIS35
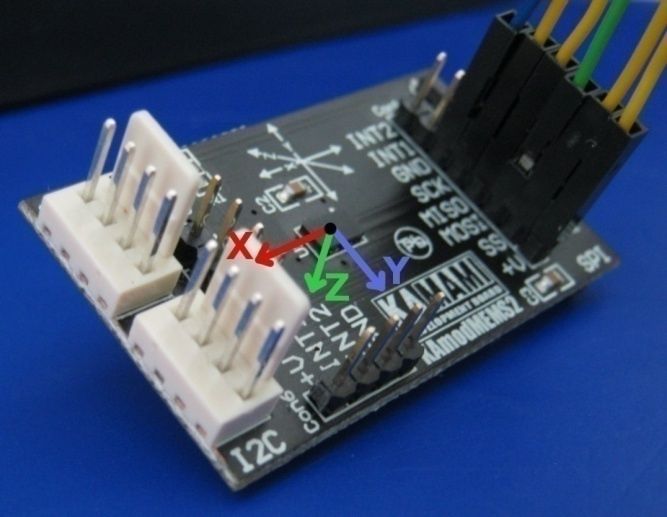
Fot. 7. Powiązanie osi kierunków z czujnikiem MEMS
Poniższy kod nie powinien sprawić problemów w zrozumieniu, ale niektóre fragmenty mogą wymagać komentarzy. Funkcja sChar2Str() konwertuje liczbę w tekst i przyjmuje wskaźnik do ciągu znaków typu char (do którego zostanie zapisana liczba w postaci symboli) oraz wartość liczbową typu signed char. Podczas wyznaczania wysokości słupków występuje podzielenie zmierzonej wartości przez 60 i pomnożenie przez 49 – pierwsza wartość została w przybliżeniu wybrana jako maksymalna mierzona statycznie, a druga określa maksymalną wysokość słupka od linii odniesienia.
signed char x, y, z , xKor=0, yKor=0, zKor=0;
void indicator(){
unsigned int j;
signed int x_temp, y_temp, z_temp;
unsigned char STATE = 0;
//Rysowanie ramek
drawRectangle(-40, -50, -20, 50, RED, 0);
drawRectangle(-10, -50, 10, 50, BLUE, 0);
drawRectangle( 20, -50, 40, 50,GREEN, 0);
//Rysowanie linii odniesienia
drawLine(-66,0,66,0,WHITE);
//Wyświetlenie oznaczeń osi
LCDPutChar('X',120, 35, 0, 0xFFF, 0x00);
LCDPutChar('Y',120, 65, 0, 0xFFF, 0x00);
LCDPutChar('Z',120, 95, 0, 0xFFF, 0x00);
while(1){
//Odczyt wartości przyśpieszeń
LIS35_GetPosition(&x, &y, &z);
//Korekta wskazan akcelerometru
x+=xKor;
y+=yKor;
z+=zKor;
sChar2Str(tempCHAR, x);//Konwersja wartości przyśpieszenia w osi x na ciąg typu String
for (j=0; j < 4; j++) //Wyświetlenie znaków ciągu
LCDPutChar(tempCHAR[j], 0, 20+j*7, 0, 0xFFF, 0x00);
sChar2Str(tempCHAR, y);
for (j=0; j < 4; j++)
LCDPutChar(tempCHAR[j], 0, 50+j*7, 0, 0xFFF, 0x00);
sChar2Str(tempCHAR, z);
for (j=0; j < 4; j++)
LCDPutChar(tempCHAR[j], 0, 80+j*7, 0, 0xFFF, 0x00);
//(***KOREKTA***)
x_temp = (signed int) (( (float) x/60)*49); //Wyznaczenie wysokości słupka
if(abs(x_temp) > 49) x_temp = (x_temp < 0) ? -49:49; //Ograniczenie wysokości słupka
y_temp = (signed int) (( (float) y/60)*49);
if(abs(y_temp) > 49) y_temp = (y_temp < 0) ? -49 : 49 ;
z_temp = (signed int) (( (float) z/60)*49);
if(abs(z_temp) > 49) z_temp = (z_temp < 0) ? -49 : 49 ;
//Rysowanie słupków przyśpieszenia
drawRectangle(-38, 0, -21, x_temp, RED, 1);
drawRectangle( -8, 0, 9, y_temp, BLUE, 1);
drawRectangle( 22, 0, 39, z_temp,GREEN, 1);
Delay(0x6FFFFF); //Ustawienie okresu aktualizacji obrazu
//Czyszczenie narysowanych słupków
drawRectangle(-38, 0, -21, x_temp, 0x000, 1);
drawRectangle( -8, 0, 9, y_temp, 0x000, 1);
drawRectangle( 22, 0, 39, z_temp, 0x000, 1);
if(GPIO_ReadInputDataBit(JOY_PORT, JOY_RIGHT) == 0) break; //Zakonczenie dzialania
}
}
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






