





ZL27ARM: współpraca z odbiornikiem GPS z modułu KAmodGPS
W projekcie zrealizowano następujące zadanie: odczyt współrzędnych z modułu KAmodGPS w formacie NMEA-0183, i taka obróbka odczytanych danych, żeby szerokość geograficzna była przedstawiona na wyświetlaczu w formacie DMS (stopnie, minuty, sekundy), a długość geograficzna w formacie DM (stopnie, minuty).
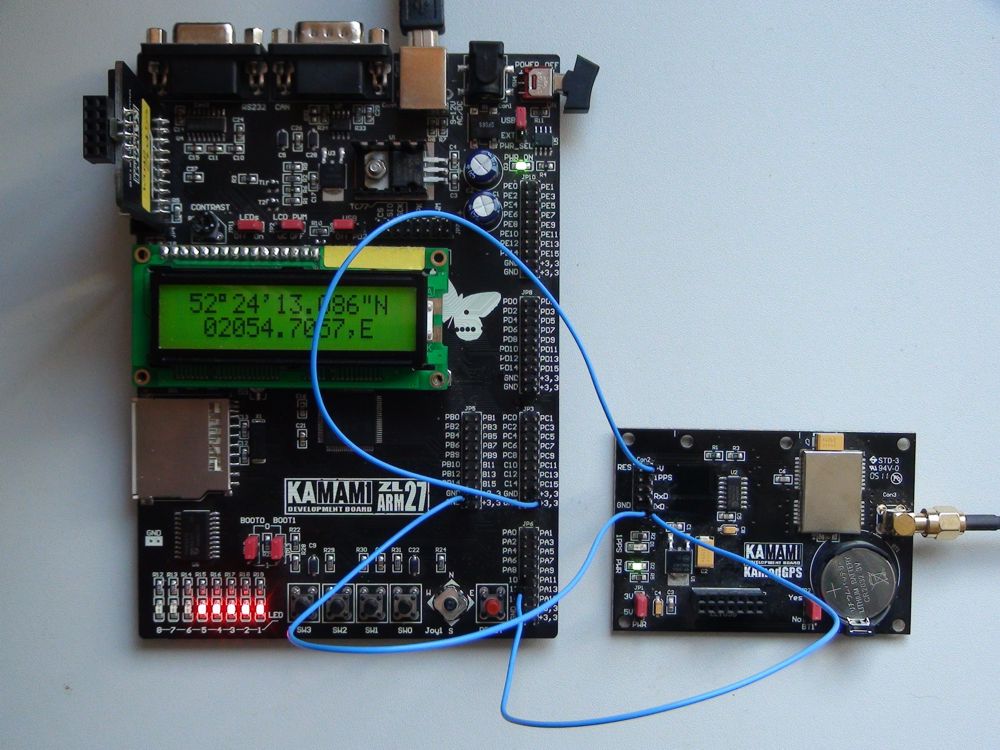
Najprostszym rozwiązaniem tak postawionego zadania okazało się połączenie modułu KAmodGPS za pomocą trzech przewodów do zestawu ZL27ARM i prezentacja wyniku działania na wyświetlaczu LCD 2×16, dla którego gniazdo znajduje się w standardowym wyposażeniu zestawu uruchomieniowego ZL27ARM (STM32F103).
Ponieważ dane z GPS są wyłącznie odbierane, to w przykładzie wykorzystano linię TxD KAmodGPS, linia RxD nie została podłączona. Schemat połączeń pomiędzy KAmodGPS i ZL27ARM pokazano na rysunku 1.
Rys. 1. Schemat połączeń pomiędzy ZL27ARM i KAmodGPS
Przed dołączeniem zasilania należy sprawdzić położenie zworki PWR w module KamodGPS i ustawić ją na odpowiednie napięcie zasilania modułu, w naszym przykładzie będzie to 3,3 V).
W programie głównym main odczytywana jest szerokość geograficzna oraz długość geograficzna za pomocą funkcji getch():
char getch(void)
{
char tmp;
while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
tmp = USART_ReceiveData(USART1);
return tmp;
}
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




