





(4) Mikrokontrolery MSP430: obsługa programatora i opcje emulatora wbudowanego w zestaw MSP-EXP430FR5739
Opcje emulatora
Jednym z komponentów środowiska IAR EW jest emulator. Opcje emulatora zademonstrujemy na przykładzie programu Oblicz_PI. Program należy pobrać z działu downloads. W programie na podstawie poniższego wzoru jest obliczana wartość liczby π.

Uruchamiamy projekt i w opcjach projektu (Project->Options) sprawdzamy czy wyjście linkera jest ustawione na format Debug information for C-SPY. Jeśli nie jest, to wprowadzamy ustawienia jak na rysunku 10. Zatwierdzamy je przyciskiem OK.
Rys.10. IAR EW – tworzenie pliku wynikowego emulatora, konfiguracja linkera
Następnie kompilujemy projekt (![]() | Project->Compile | Ctrl+F7), linkujemy pliki projektu (
| Project->Compile | Ctrl+F7), linkujemy pliki projektu (![]() | Project->Make | F7) i programujemy mikrokontroler z włączona opcją emulatora (
| Project->Make | F7) i programujemy mikrokontroler z włączona opcją emulatora (![]() | Project->Download and Debug | Ctrl+D). Uruchamiany jest emulator projektu (rysunek 11).
| Project->Download and Debug | Ctrl+D). Uruchamiany jest emulator projektu (rysunek 11).
Rys.11. IAR EW – okno emulatora, projekt Oblicz PI: a) kod źródłowy programu b) kod maszynowy programu c) okno komunikatów emulatora
Pracą mikrokontrolera możemy sterować przy pomocy poleceń zestawionych w tabeli 1.
Tab. 1. Ikony i polecenie służące do sterowania pracą mikrokontrolera w emulatorze zintegrowanym w środowisku IAR EW
| Przycisk | Menu -> Debug | Skrót klawiszowy | Opis |
 |
Reset | – | Restart mikrokontrolera |
 |
Break | – | Przerwanie pracy mikrokontrolera |
 |
Step Over | F10 | Pojedynczy krok, bez wchodzenia do funkcji |
 |
Step Into | F11 | Wejście od funkcji |
 |
Step Out | Shift + F11 | Wyjście z funkcji |
 |
Run to Cursor | – | Wykonaj program do miejsca ustawienia kursora. Zatrzymaj pracę mikrokontrolera w miejscu ustawienia kursora |
 |
Go | F5 | Uruchom pracę mikrokontrolera |
W kodzie źródłowym programu możemy ustawiać pułapki sprzętowe. Umieszczamy kursor w miejscu w którym chcemy ustawić pułapkę sprzętową i wciskamy przycisk: ![]() . Ten sam efekt uzyskamy wybierając z zakładki Edit polecenie Toggle Breakpoint lub stosując skrót klawiszowy F9. Żeby zdjąć pułapkę sprzętową postępujemy w analogiczny sposób.
. Ten sam efekt uzyskamy wybierając z zakładki Edit polecenie Toggle Breakpoint lub stosując skrót klawiszowy F9. Żeby zdjąć pułapkę sprzętową postępujemy w analogiczny sposób.
Emulator środowiska IAR EW pozwala nam na dostęp do zmiennych programu (odczyt, oraz modyfikacja). Podstawowe opcje dostępu przedstawiono w tabeli 2.
Tab. 2. Wybrane opcje dostępu do zmiennych programu
| Menu -> View | Opis |
| Watch | Podgląd i modyfikacja zmiennych oraz wyrażeń wskazanych przez programistę. Żeby dodać zmienną/wyrażenie do okna Watch zaznaczmy zmienną/wyrażenie w programie, wciskamy prawy przycisk myszki i wybieramy opcję: Add to Watch. Zmienne/wyrażenia można także dodawać bezpośrednio w oknie Watch. Należy kliknąć w pole click to edit i wprowadzić nazwę zmiennej, albo zdefiniować wyrażenie. Wyrażeniem w oknie Watch może być formuła matematyczna, rejestr procesora, itp. |
| Locals | Podgląd i modyfikacja zmiennych lokalnych |
| Statics | MPodgląd i modyfikacja statycznych zmiennych globalnych |
Wartość zmiennych, oraz wyrażeń, może być prezentowana w jednym z kilku formatów (binarnie, dziesiętnie, heksadecymalnie, itd.). Format prezentacji danych ustalamy klikając prawym przyciskiem myszki na zmienną/wyrażenie i wybierając jedną z dostępnych opcji. (rysunek 12)

Rys. 12. IAR EW – okno emulatora: a) Watch b) Statics c) Locals d) konfiguracja formatu prezentacji danych
Korzystając z emulatora środowiska IAR EW możemy również uzyskać dostęp do rejestrów mikrokontrolera (View-> Register). Możemy odczytywać, a także modyfikować poszczególne bity konfiguracyjne rejestrów. Możliwy jest również dostęp do pamięci mikrokontrolera (View->Memory) oraz odczyt wywołań stosu programu (View->Call Stack). Okno emulatora z włączonymi opcjami „rejestry/pamięć/wywołania stosu” pokazano na rysunku 13.
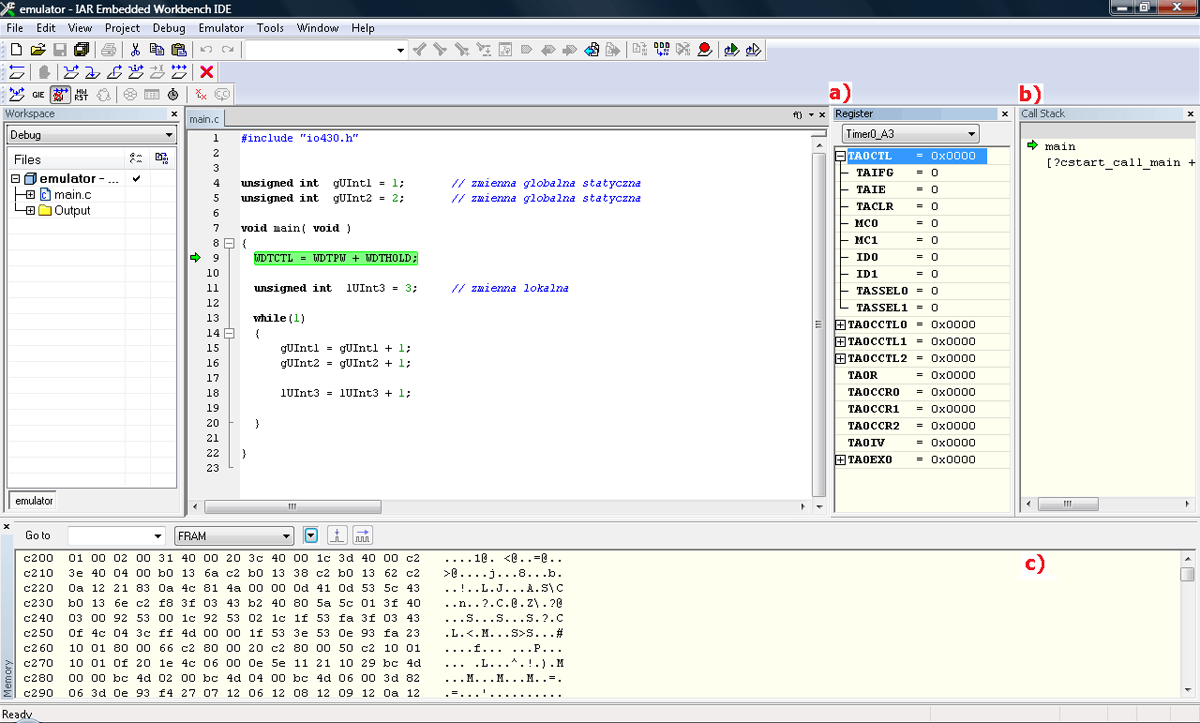
Rys. 13. IAR EW – okno emulatora: a) rejestry mikrokontrolera – moduł licznika TimerA b) wywołania stosu – funkcja main c) pamięć mikrokontrolera – obszar pamięci FRAM
Wróćmy do projektu Oblicz PI. W oknie emulatora (rysunek 11) zamykamy zakładkę kodu maszynowego (b), oraz zakładkę komunikatów emulatora (c). Dodajemy zakładkę Watch (View->Watch) i ustawiamy dostęp do zmiennej globalnej pi_2 (połowa wartości liczby P), dostęp do zmiennej lokalnej n (argument funkcji Pi), oraz wprowadzamy wyrażenie pi_2 *2 (wartość liczby P). Następnie uruchamiamy pracę mikrokontrolera (![]() | Debug -> Go | F5). Wygląd okna emulatora ilustruje rysunek 14.
| Debug -> Go | F5). Wygląd okna emulatora ilustruje rysunek 14.
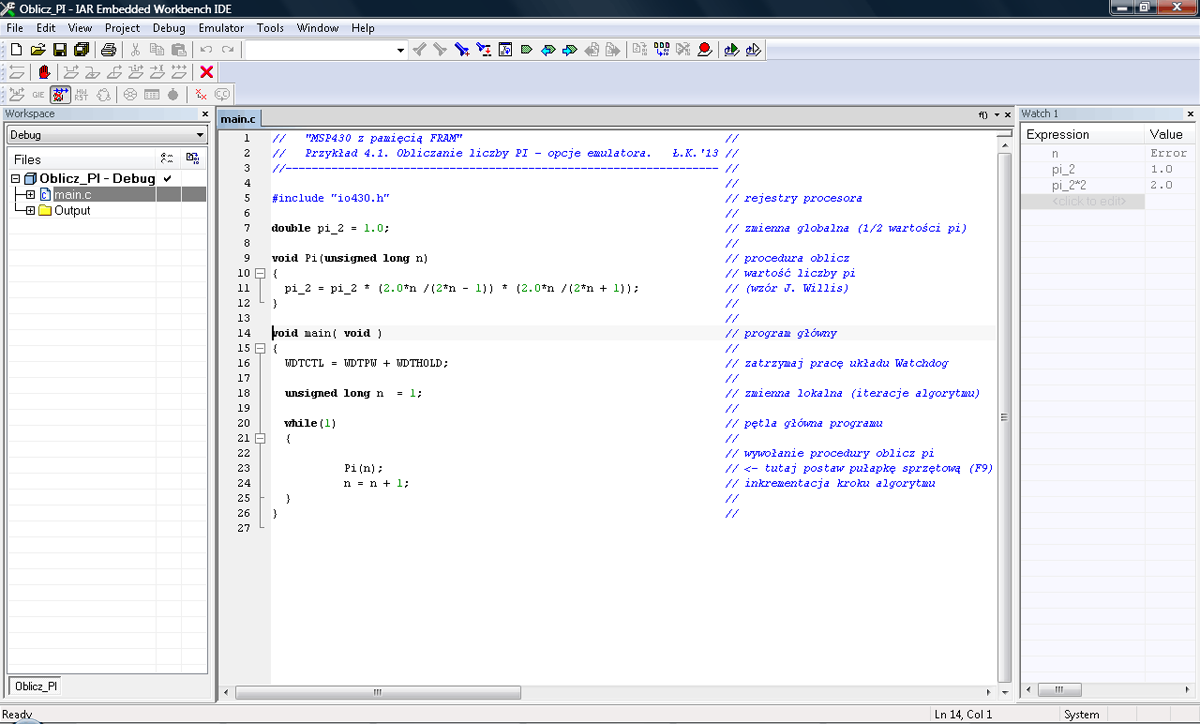
Rys. 14. IAR EW – okno emulatora: projekt Oblicz PI, uruchomienie pracy mikrokontrolera MSP430
Następnie kursor myszki ustawiamy w linii numer 23 (wywołanie procedury obliczającej wartość liczby π) oraz ustawiamy pułapkę sprzętową ( ![]() | Edit ->Toggle Breakpoint | F9). Praca mikrokontrolera zostaje zatrzymana „na pułapce”. W oknie Watch są wyświetlane uaktualnione wartości zmiennych n, pi_2 oraz nowo obliczono wartość formuły pi_2*2. W przykładzie demonstrowanym na rysunku 15 po zrealizowaniu 2200 iteracji algorytmu (n = 2200) obliczona wartość liczby π wynosi: 3,14123559356554 (zgodność ze wzorcem liczby π wynosi 3 cyfry po przecinku).
| Edit ->Toggle Breakpoint | F9). Praca mikrokontrolera zostaje zatrzymana „na pułapce”. W oknie Watch są wyświetlane uaktualnione wartości zmiennych n, pi_2 oraz nowo obliczono wartość formuły pi_2*2. W przykładzie demonstrowanym na rysunku 15 po zrealizowaniu 2200 iteracji algorytmu (n = 2200) obliczona wartość liczby π wynosi: 3,14123559356554 (zgodność ze wzorcem liczby π wynosi 3 cyfry po przecinku).
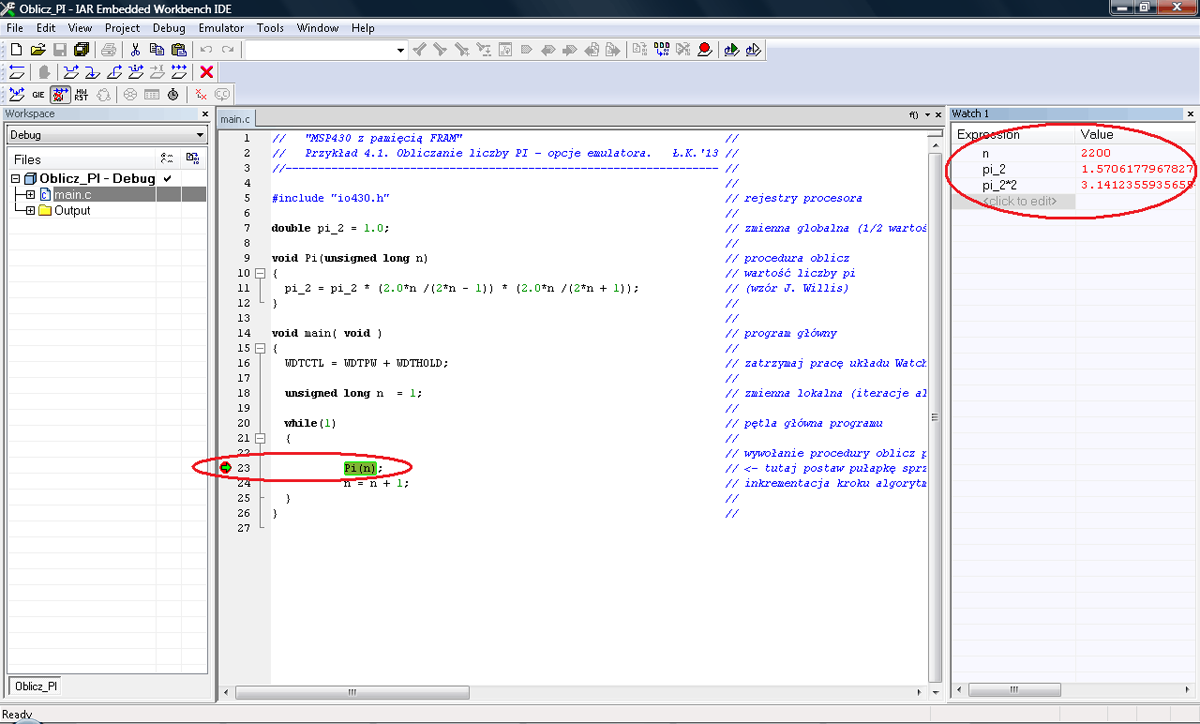
Rys. 15. IAR EW – okno emulatora: projekt Oblicz PI, zatrzymanie pracy MSP430
Żeby uzyskać bardziej precyzyjną wartość liczby π, usuwamy pułapkę sprzętową ( ![]() | Edit ->Toggle Breakpoint | F9) i ponownie uruchomić pracę mikrokontrolera (
| Edit ->Toggle Breakpoint | F9) i ponownie uruchomić pracę mikrokontrolera ( ![]() | Debug -> Go | F5). Po pewnym czasie ponownie ustawiamy pułapkę sprzętową, a praca mikrokontrolera zostaje zatrzymana. Wówczas z okna Watch odczytujemy nową wartość liczby π. Pracując z emulatorem możemy również używać pozostałych funkcji sterujących MSP430 opisanych w tabeli 1. W praktyce bardzo użyteczne są funkcje pojedynczego kroku (
| Debug -> Go | F5). Po pewnym czasie ponownie ustawiamy pułapkę sprzętową, a praca mikrokontrolera zostaje zatrzymana. Wówczas z okna Watch odczytujemy nową wartość liczby π. Pracując z emulatorem możemy również używać pozostałych funkcji sterujących MSP430 opisanych w tabeli 1. W praktyce bardzo użyteczne są funkcje pojedynczego kroku (![]() | Step Over | F10), wejścia do funkcji (
| Step Over | F10), wejścia do funkcji ( ![]() | Step Into | F11), oraz wyjścia z funkcji(
| Step Into | F11), oraz wyjścia z funkcji( ![]() | Step Out | Shift + F11). Działanie tych oraz innych funkcji emulatora można przećwiczyć korzystając z omawianego projektu Oblicz PI. Żeby zakończyć pracę emulatora wciskamy przycisk
| Step Out | Shift + F11). Działanie tych oraz innych funkcji emulatora można przećwiczyć korzystając z omawianego projektu Oblicz PI. Żeby zakończyć pracę emulatora wciskamy przycisk ![]() . Ewentualnie z zakładki Debug wybieramy opcje Stop Debugging albo używamy skrótu klawiszowego Ctrl+Shift+D.
. Ewentualnie z zakładki Debug wybieramy opcje Stop Debugging albo używamy skrótu klawiszowego Ctrl+Shift+D.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






