





Implementacja algorytmów sterowania silnikami DC w XMC4000
Transformacja Clarka:
![]()
![]()
Transformacja Parka:
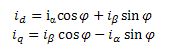
Gdy wartości i d oraz i q są już znane, powinny zostać przetworzone przez regulator PI. Regulator PI jest odmianą regulatora proporcjonalno-całkująco-różniczkującego (PID – proportional-integral-derivative controller ), różniąc się od niego tym, że blok różniczkujący nie jest używany (K D ma wartość zero). Jeden regulator PI steruje prądem i d sprowadzając jego wartość do zera i zapewniając kąt 90 stopni pomiędzy strumieniem stojana i wirnika. Drugi regulator PI steruje prądem i q ustalając jego zadeklarowaną wartość.
Biblioteka CMSIS DSP zawiera implementację stałoprzecinkową i zmiennoprzecinkową transformacji Clarka i Parka, jak również kontrolera PID. Na rysunku 5 zilustrowano schemat blokowy regulatora PI. Sygnał e(t) jest różnicą pomiędzy zadaną wartością i d oraz i q i aktualną wartością i d oraz i q, które są wyliczone przy pomocy zmierzonych prądów stojana i pozycji wirnika.
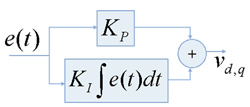
Rys. 5. Kontroler PI
Należy zauważyć, że wyjściem regulatorów PI są wartości napięcia v d oraz v q. Nie można ich bezpośrednio przełożyć na parametry sygnału PWM.
Istnieje wiele sposobów, aby zamienić napięcia v d oraz v q na sygnały 3-fazowego falownika. Jedną z nich jest SVM ( Space Vector Modulation ). v d oraz v q są powiązane z pozycją wirnika. Należy wykonać rozkład tych wektorów na wektory napięcia, które mogą być generowane przez 3-fazowy falownik.
Na rysunku 6 pokazano przykład 3-fazowego falownika. Każdy wektor napięcia powstaje poprzez włączenie jednego sterownika typu „high-side switch” oraz dwóch sterowników typu „low-side switch”, bądź dwóch sterowników typu „high-side switch” oraz jednego sterownika typu „low-side switch”. Wektory napięcia oraz odpowiadające wygenerowaniu ich stany falownika pokazano na rysunku 7.
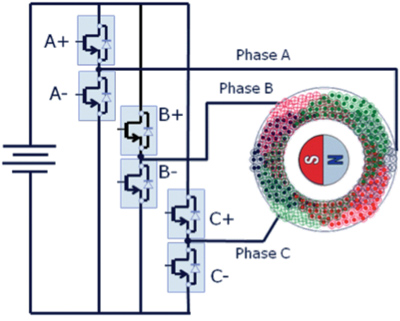
Rys. 6. 3-fazowy falownik połączony z 3-fazowym silnikiem PMSM
Uzyskanie rozkładu v d i v q na wektory napięć przeprowadzone zostanie w dwóch etapach. Pierwszy etap to wykonanie odwrotnej transformacji Parka ( Inverse Park Transform ). Jak nazwa wskazuje, zamienia ona v d i v q na v α oraz v β, co pokazano na rysunku 7 (A). Odwrotna transformacja Parka została zaimplementowana w bibliotece CMSIS DSP.
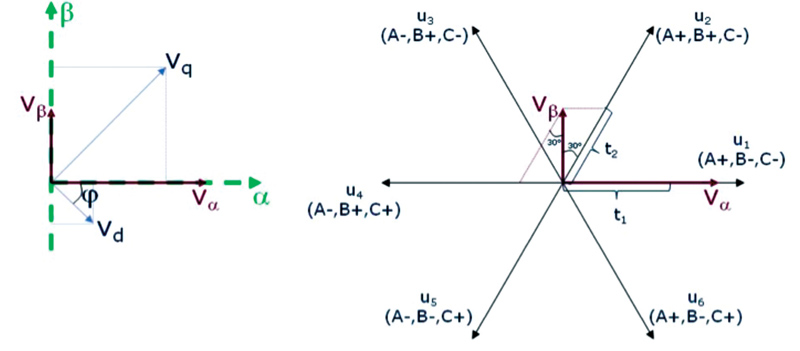
Rys. 7. Rysunek A pokazuje przekształcenie v d i v q na v α oraz v β za pomocą odwrotnej transformacji Parka, natomiast rysunek B pokazuje przekształcenie v α i v β na stany sterowników
Odwrotna transformacja Parka:
![]()
Gdy wartości v α i v β są znane, mogą zostać przekształcone na wektory stanów sterowników (wybierany jest wektor najbliższy sumie v α i v β ). Poniżej przedstawiono wzory stosowane w przypadku, gdy wektor sumy v α i v β zawiera się pomiędzy u 1 i u 2 :
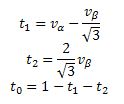
t 1 i t 2 to procent czasu, przez jaki aktywny powinien być odpowiednio pierwszy i drugi wektor najbliższy sumie v α i v β. W przypadku gdy t 1 + t 2 < 100%, pozostaje trochę czasu, który nazwany jest t 0. W jego trakcie wszystkie sterowniki mogą pozostawać w stanie włączenia.
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")

![Szymon Robak oprowadza po katowickim Laboratorium Badań Kompatybilności Elektromagnetycznej w Sieć Badawcza Łukasiewicz - Instytucie Sztucznej Inteligencji i Cyberbezpieczeństwa. Zapraszamy na film! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/06/Szymon-Robak-tytulowe.png "https://www.youtube.com/watch?v=gHcP8AajoN4")

