





Mikrokontrolery Infineon XMC4500 w praktyce, część 7. Obsługa magistrali CAN
Analiza sieci CAN
Analiza ruchu sieciowego umożliwia realizację szeregu zadań diagnostycznych pozwalających na np. wykrywanie różnego rodzaju nieprawidłowości, optymalizowanie sieci, zbieranie danych statystycznych itp. Kompleksowa realizacja tej czynności wymaga nie tylko wiedzy, ale również odpowiednich narzędzi diagnostycznych.
Pierwszą grupą narzędzi pozwalających na analizę sieci CAN są tak zwane konwertery. Nazwa urządzeń pochodzi od zasady ich działania – zamiany informacji z formatu CAN na inny (np. USB , RS-232). Proces ten odbywa się to w następujący sposób:
- konwerter odbiera przesyłane przez magistralę ramki CAN, a następnie wysyła je do komputera, gdzie ich zawartość jest wyświetlana operatorowi poprzez program,
- konwerter odbiera z komputera polecenia wysłania ramek o zadanych przez operatora parametrach, a następnie tworzy ramki i wysyła je na magistralę.
Na rynku istnieje szereg komercyjnie oferowanych urządzeń będących konwerterami CAN. Są to między innymi CRUSB firmy DIGA, USB2CAN firmy SYGMI czy PCAN-USB firmy Peak Systems (rysunek 11).
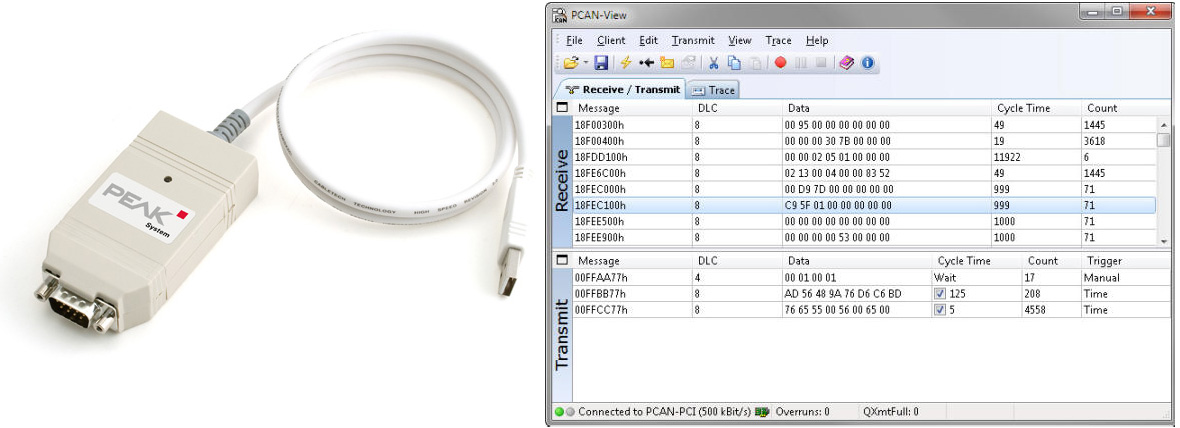
Rys. 11. Konwerter CAN-USB firmy Peak Systems i dedykowany do jego obsługi program komputerowy
Drugą grupę narzędzi umożliwiających analizowanie sieci CAN stanowią przyrządy pomiarowe. Takim przyrządem może być np. oscyloskop. Klasyczny oscyloskop potrafi zarejestrować sygnał CAN. Pozwala to użytkownikowi ocenić parametry sygnału takie jak jego amplituda, parametry czasowe, kształt, zbocza itp. Sam oscyloskop nie daje jednak możliwości wygodnego analizowania sygnału na poziomie zawartości informacji. Taką funkcjonalność udostępnia dopiero bardziej specjalistyczny zestaw – oscyloskop z rozszerzeniem analizy CAN.
| Redakcja portalu dziękuje firmie Tespol za umożliwienie dostępu do oscyloskopu MDO4104-3, który – dzięki wbudowanemu analizatorowi CAN – ułatwił analizę i poprawę jakości działania systemu demonstracyjnego. |
Przykładowy zestaw to oscyloskop MDO4104-3 z opcją DPO4 Auto firmy Tektronix, których dystrybutorem w Polsce jest firma Tespol. Stanowisko pomiarowe składające się z wyposażonego w opcję DPO4 Auto oscyloskopu MDO4104-3 z oraz magistrali CAN i dwóch węzłów CAN zbudowanych w oparciu o płytki XMC4500 Relax Kit przedstawiono na fotografii 12.
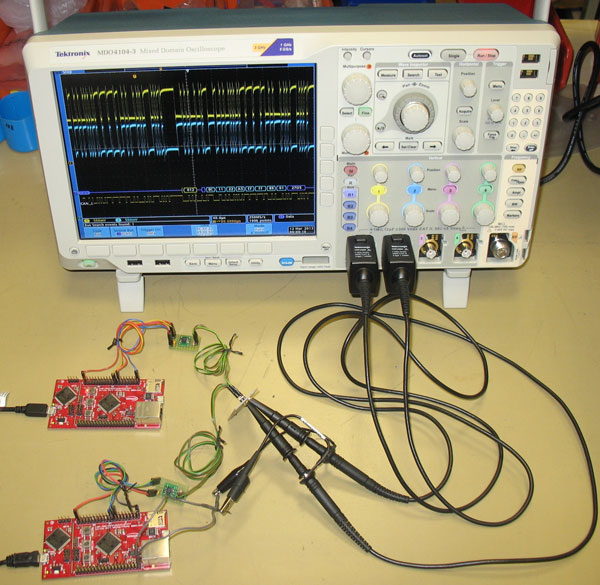
Fot. 12. Stanowisko do analizowania ruchu w sieci CAN przy wykorzystaniu oscyloskopu
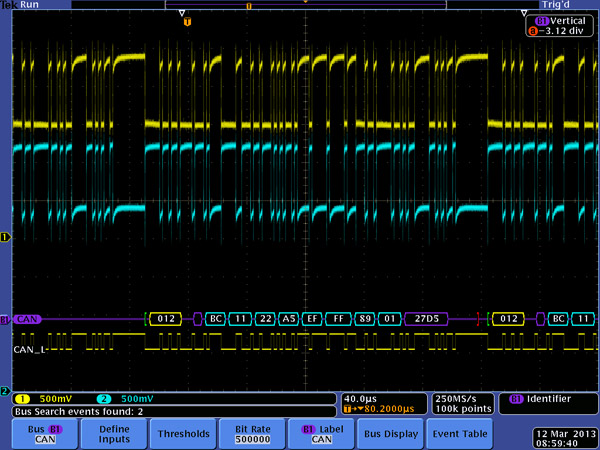
Rys. 13. Ekran oscyloskopu, od góry: sygnał różnicowy CAN, zdekodowania wiadomość, sygnał binarny
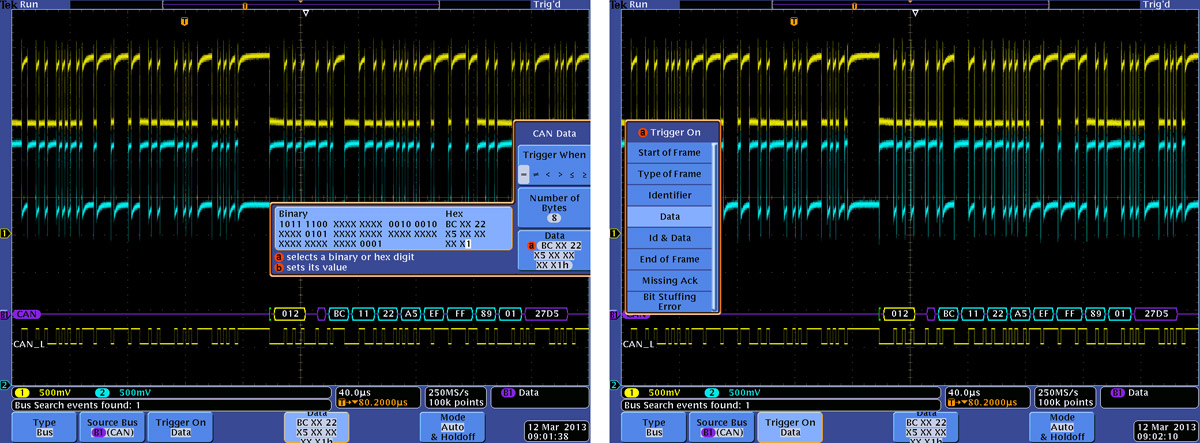
Rys. 14. Konfiguracja trybów wyzwalania

Rys. 15. Lista wiadomości CAN
Dzięki rozszerzeniu DPO4 Auto oscyloskop MDO4104-3 może na podstawie zarejestrowanego sygnału uzyskać sygnał binarny oraz zdekodować wiadomość CAN (rysunek 13). Dodatkowo użytkownik może skonfigurować tryby wyzwalania np. konkretną wartość identyfikatora lub fragmentu identyfikatora wiadomości CAN (rysunek 14). Wiadomości spełniające ustawione kryteria mogą być wyświetlane w formie listy (rysunek 15).
Literatura
[1] https://auobd2.com/service/controller-area-network-can-bus-diagnostics-456.html [2] An Overview of Controller Area Network (CAN) Technology, Machine Bus Corporation, 2003 [3] Introduction to the Controller Area Network (CAN), Texas Instruments, 2008 [4] http://www.technologyuk.net/telecommunications/industrial_networks/can.shtml [5] www.infineon.com XMC4500 Reference Manual [6] System pomocy DAVE 3 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






