





Sterownik modelu helikoptera na STM32 z manipulatorami MEMS
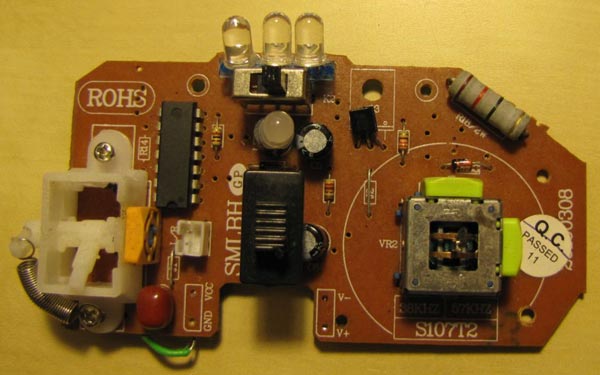
Fot. 7. Zdemontowana płytka kontrolera helikoptera Syma 107
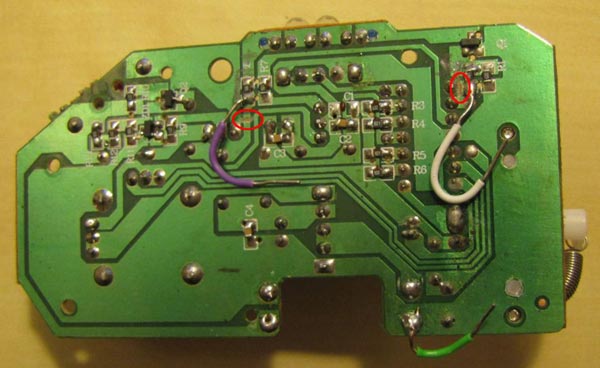
Fot. 8. Dolna strona płytki drukowanej z zaznaczonymi na czerwono miejscami przecięcia ścieżek oraz dolutowanymi przewodami (biały: sterowanie podczerwonymi diodami LED, fioletowy: zasilanie +, zielony: zasilanie –)
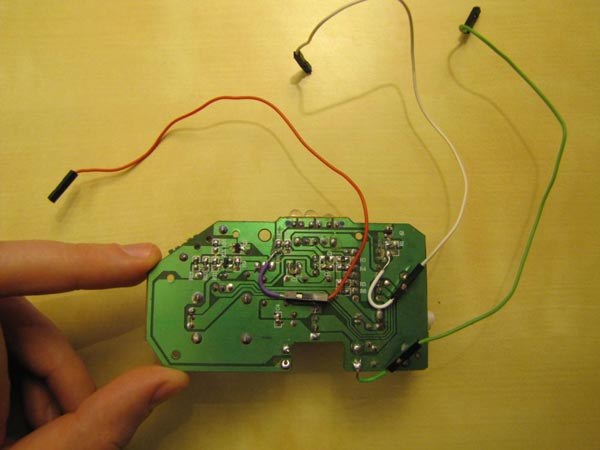
Fot. 9. Płytka kontrolera z wyprowadzonymi przewodami (biały: sterowanie podczerwonymi diodami LED, czerwony: zasilanie +, zielony: zasilanie –)
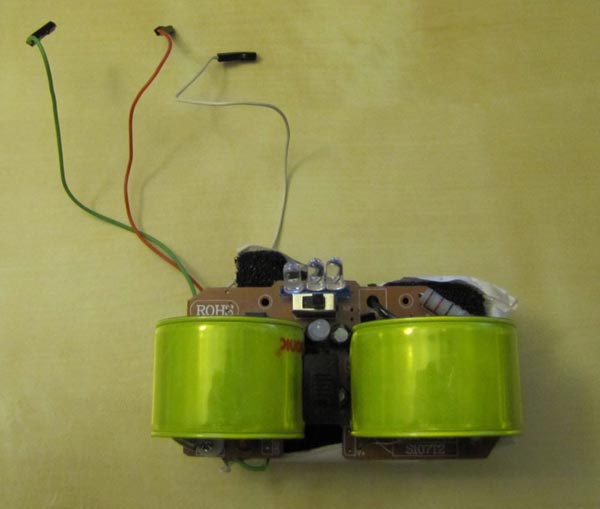
Fot. 10. Płytka kontrolera z akcesoriami (z odblaskową opaską rowerową i czarną pianką z kawałkiem papieru)

Fot. 11. Przykład przymocowania płytki kontrolera Syma 107 do ręki
Sposób połączenia płytek STM32F4Discovery oraz zmodyfikowanej płytki kontrolera helikoptera Syma 107 przedstawiono w tabelach poniżej.
|
Płytka STM32F4DISCOVERY (lewa ręka) |
Przewód |
Płytka STM32F4DISCOVERY (prawa ręka) |
|
VDD |
<=> |
VDD |
|
PD0 |
<=> |
PE8 |
|
PD1 |
<=> |
PE9 |
|
PD2 |
<=> |
PE10 |
|
PD3 |
<=> |
PE11 |
|
PD4 |
<=> |
PE12 |
|
PD5 |
<=> |
PE13 |
|
PD6 |
<=> |
PE14 |
|
PD7 |
<=> |
PE15 |
|
GND |
<=> |
GND |
|
Płytka STM32F4DISCOVERY (prawa ręka) |
Przewód |
Płytka kontrolera Syma 107 |
|
5V |
<=> |
Zasilanie + |
|
PC6 |
<=> |
Sterowanie |
|
GND |
<=> |
GND |
WAŻNE!
- Kabel zasilający z USB należy podłączyć do płytki STM32F4DISCOVERY prawej ręki;
- Za sterowanie wartością THROTTLE – potocznie wznoszeniem – odpowiada lewa płytka (pochylanie przód-tył lewym nadgarstkiem);
- Za sterowanie wartością YAW, odpowiada prawa płytka (pochylanie lewo-prawo prawym nadgarstkiem);
- Za sterowanie wartością PITCH, odpowiada prawa płytka (pochylanie przód-tył prawym nadgarstkiem).
Po podłączeniu wszystkich płytek zgodnie z powyższym opisem i po podłączeniu kabla USB do płytki STM32F4DISCOVERY prawej ręki, należy:
- wykonać zerowanioe każdej z dwóch płytek STM32F4DISCOVERY w położeniu bazowym (zerowym);
- w razie konieczności zmienić wartość ADJUST_value w kodzie programu prawej płytki STM32F4DISCOVERY.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






