





Jitter, pętle PLL, generacja sygnałów zegarowych – elementarz
Wraz ze wzrostem częstotliwości taktowania i przepustowości kanałów komunikacyjnych inżynierowie, którzy nie musieli zajmować się jitterem zegara i szumami fazowymi, zauważają coraz większą potrzebę poszerzenia swojej wiedzy w tych obszarach. Niniejszy tekst dostarcza ogólnego omówienia tematu jitteru, przedstawia praktyczne wskazówki dotyczące jego pomiarów i prezentuje rolę pętli synchronizacji fazy (Phase-Locked Loop, PLL) w tej dziedzinie.
Klasy jitteru
Zacznijmy od zdefiniowania kilku klas jitteru i omówienia, dlaczego są one istotne w niektórych zastosowaniach. Jitter dzieli się na dwie zasadnicze kategorie: losowy i deterministyczny (rysunek 1).
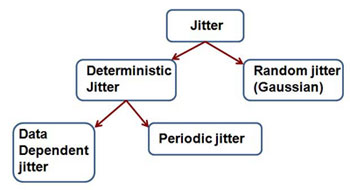
Rys. 1. Klasy jitteru
Jitter losowy to szerokopasmowy, gaussowski proces stochastyczny, nazywany czasem szumem wewnętrznym (intrinsic noise), gdyż występuje on zawsze. Na przedstawianych dalej wykresach szumu fazowego, względnie gładkie części na końcu krzywych reprezentują poziom szumów (noise floor) odpowiadającą jitterowi losowemu. Mimo, że jitter losowy jest często określany mianem szumu tła lub szumu termicznego, może on być najważniejszym składnikiem całkowitego jitteru. Ponieważ jitter losowy jest modelowany rozkładem Gaussa, jego chwilowa wartość może być, z matematycznego punktu widzenia, nieograniczona. Ogony przedstawionej na rysunku 2 krzywej gaussowskiej asymptotycznie zdążają do zera, ale nigdy go nie osiągają i mimo, iż prawdopodobieństwo wystąpienia niektórych wartości jest bardzo małe, to nie jest zerowe, a zatem szum gaussowski jest uznawany na nieograniczony.
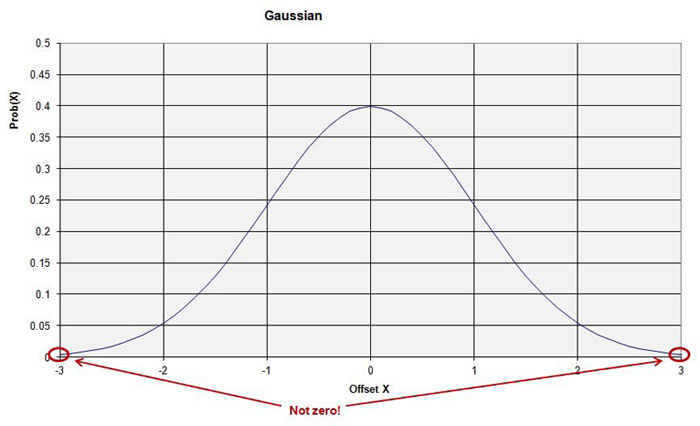
Rys. 2. Rozkład Gaussa
Jitter deterministyczny nie jest losowy, ani nieunikniony – ma konkretną przyczynę, choć może być bardzo trudno ją zidentyfikować. Często ma charakter okresowy lub wąskopasmowy. Dla przykładu, może być spowodowany przesłuchami sygnału okresowego ze źródła zasilania lub sygnałów jednoczesnego przełączania szybkich wyjść układu scalonego. Jitter deterministyczny można podzielić na okresowy i zależny od danych. Zakłócenia ze źródła zasilania są przykładem jitteru okresowego, gdyż będzie on miał ten sam okres, co układ przełączający. Dla odmiany przykładem jitteru quasiokresowego, zależnego od danych, są interferencje między symbolowe, wywoływane przez asynchroniczny strumień zakodowany 8B/10B (np. w interfejsie Ethernet PCI Express). Ten sposób kodowania wykorzystuje dynamiczne zmiany współczynnika wypełnienia i nieregularne zbocza sygnału zegara zależnie od układu bitów w strumieniu, a oba te czynniki zwiększają całkowity jitter. Biorąc pod uwagę, że sygnały zegarowe są pozbawione jitteru zależnego od danych, a niniejszy tekst jest poświęcony sygnałom zegarowym, jitter tego typu nie będzie tu już więcej wspominany.
Jitter można też podzielić na skorelowany i nieskorelowany. Korelacja występuje zawsze między dwoma zdarzeniami lub rozkładami, więc mówiąc o korelacji, zawsze trzeba zapytać, z czym ona występuje. Jitter okresowy zawsze jest więc skorelowany z czymś lub przez coś wywołany. Przykładem skorelowanego jitteru nieokresowego może być sytuacja, w której linia danych interfejsu szeregowego zakłóca sygnał zegarowy. Zakłócenie jest skorelowane z danymi, ale sygnał na linii danych może być zarówno okresowy, jak i nieokresowy, a prawdopodobne jest, że będzie on miał charakter mieszany. Dwa zdarzenia są nieskorelowane, jeśli nie są ze sobą związane statystycznie. Jitter nieskorelowany nie jest więc statystycznie powiązany z możliwym do zidentyfikowania zjawiskiem. Jitter losowy zawsze jest nieskorelowany, ale jitter nieskorelowany nie musi być losowy i możliwe jest występowanie dwóch sygnałów z jitterami okresowymi, które są nieskorelowane. W takich przypadkach dwa nieskorelowane źródła jitteru nie wpływają na siebie nawzajem.
Najważniejszą kwestią jest tu jednak fakt, że zarówno jitter okresowy, jak i skorelowany mają konkretne przyczyny. Jeśli uda się je określić, czasami możliwe jest podjęcie działań zmniejszających jitter całkowity.
Rodzaje pomiarów jitteru
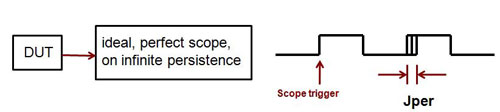
Powszechnie wykorzystywanych jest kilka typów pomiarów jitteru i ważne jest umieć dobrać proces pomiarowy do konkretnego zastosowania. Jak pokazano na rysunku 3, szczytowy jitter międzyokresowy (cycle-to-cycle jitter) to maksymalna różnica między dwoma kolejnymi okresami sygnału zegarowego, mierzona w ustalonym czasie, najczęściej 1000 lub 10000 okresów. Miara ta jest używana zawsze wtedy, gdy istnieje potrzeba ograniczenia rozmiaru nagłego skoku częstotliwości. Angielski termin peak-to-peak jitter (jitter międzyszczytowy) jest natomiast definiowany jako różnica między najmniejszą i największą długością okresu uzyskaną podczas pomiaru. Miary tej używa się, np. przy sterowaniu pętlami PLL, kiedy to pożądane jest ograniczanie chwilowych zmian częstotliwości, aby pętla nie straciła synchronizacji.

Rys. 3. Jitter międzyokresowy (cycle-to-cycle jitter)
Jak przedstawiono na rysunku 4, międzyszczytowy jitter okresowy (peak-to-peak period jitter) jest różnicą między największym i najmniejszym okresem dla wszystkich uzyskanych w czasie pomiaru wartości. Jest to miara bardzo użyteczna dla zagwarantowania ustawienia i czasu trzymania przerzutników w systemach cyfrowych.
Rys. 4. Międzyszczytowy jitter okresowy (peak-to-peak period jitter)
Na rysunku 5 przedstawiono jitter związany z błędem przedziału czasu (Time Interval Error jitter, TIE jitter), znany też jako jitter zakumulowany (accumulated jitter) lub jitter fazowy (phase jitter). Jest on w istocie odchyleniem od idealnego okresu zegara, jakie występuje łącznie we wszystkich okresach. Zawiera on jitter na wszystkich częstotliwościach modulacji i jest używany powszechnie w systemach sieci rozległych WAN, takich jak SONET, Synchronous Ethernet (SyncE) czy sieci optyczne OTN.
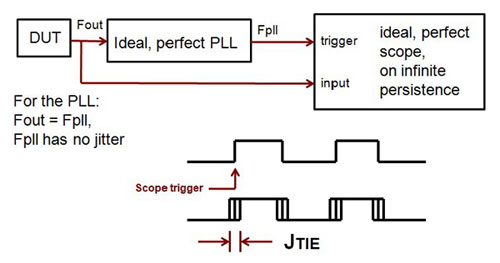
Rys. 5. Jitter TIE (Time Interval Error jitter)
Jest intuicyjne, że jitter międzyokresowy ma znaczny komponent wysokoczęstotliwościowy, ponieważ ramka czasowa wpływająca na dany okres zegara obejmuje tylko ten jeden okres. Podobnie, wydaje się, że jitter okresowy ma więcej składowych o wysokich częstotliwościach niż jitter fazowy (TIE). Można to zaobserwować na rysunku 6, przedstawiającym wyniki pomiarów trzech typów jitteru wykonanych dla sygnału zegarowego zakłóconego jitterem typu szum biały o płaskim widmie. Jak można zauważyć, jitter TIE jest taki sam dla wszystkich częstotliwości, co jest własnością szumu białego, podczas gdy jitter okresowy i międzyokresowy mają widma w różnym stopniu nachylone w kierunku wyższych składowych.
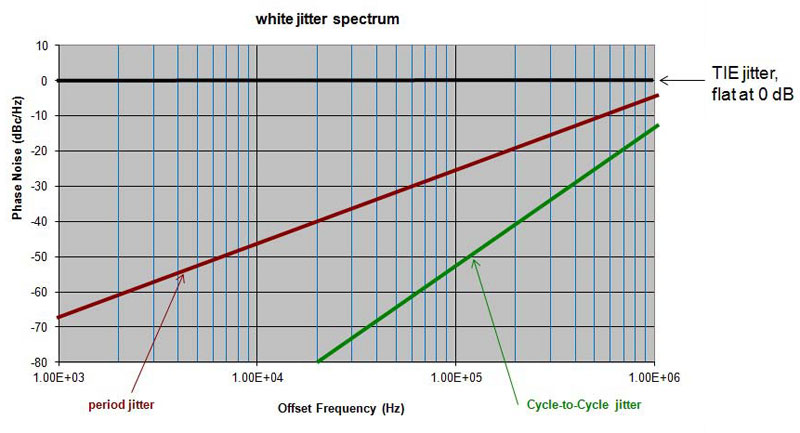
Rys. 6. Zawartość częstotliwościowa jitterów: TIE, okresowego i międzyokresowego
Dla wszystkich typów jitteru możliwe jest policzenie różnych parametrów statystycznych. Dla jitterów TIE, okresowego i międzyokresowego istnieje wartość międzyszczytowa, RMS (Root Mean Squared) i inne, ale niektóre z parametrów są bardziej popularne od innych. Do policzenia wartości międzyszczytowej konieczne jest zebranie odpowiednio dużej liczby próbek, aby pomiar był wiarygodny – liczba ta waha się typowo od 1000 do 10000.
Często chcemy konwertować wartości międzyszczytowe na RMS i z powrotem. Typowym podejściem do tego problemu jest użycie współczynnika szczytu (crest factor), przy którym zakłada się gaussowski model szumu. Do obliczeń konieczna jest znajomość akceptowalnej bitowej stopy błędów (BER), która jest albo podana, albo można ją założyć, a otrzymany współczynnik wykorzystuje się do konwersji. Dla przykładu, przy BER wynoszącej 10…12, współczynnik szczytu RMS to 14, a zatem sygnał zegara z jitterem o wartości RMS równej 1 ps ma wartość międzyszczytową jitteru równą 14 ps. Więcej na ten temat można znaleźć rozdziale 12.11.2.2 publikacji [2].
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Opcja DDS zwiększa elastyczność generatorów arbitralnych (AWG) ogólnego przeznaczenia
Opcja DDS zwiększa elastyczność generatorów arbitralnych (AWG) ogólnego przeznaczenia  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników 




