





Mikrokontrolery AVR XMEGA w praktyce, część 7. Sygnały zegarowe
W mikrokontrolerach ATmega i ATtiny układ dystrybucji sygnałów zegarowych był tak prosty, że wręcz aż prymitywny. W szczególności w procesorach starej generacji, takich jak ATmega8, mogliśmy wybrać źródło sygnału zegarowego przy pomocy fusebitów i podczas pracy procesora w żaden sposób nie można było go zmienić. Ponadto, błędne ustawienie fusebitów mogło prowadzić do zablokowania procesora. Najwyższy czas, by porzucić poczciwą ósemkę i przejść na mikrokontrolery nowej generacji!
W XMEGA układ zegarowy jest zdecydowanie bardziej rozbudowany. Mamy do dyspozycji różne źródła sygnału zegarowego, takie jak wbudowany generator szybki 32 MHz, energooszczędny 32 kHz oraz normalny 2 MHz, który uruchamia się zawsze po włączeniu zasilania. Możemy te częstotliwości podzielić preskalerem lub pomnożyć wbudowanym układem PLL. Oprócz tego, możemy oczywiście podłączyć różne kwarce, a w razie uszkodzenia kwarcu, procesor samoczynnie przełączy się na wbudowany generator. Mało tego – podczas pracy możemy zmieniać nie tylko częstotliwość zegara, ale również źródło sygnału. Różne peryferia mogą być taktowane różnymi zegarami, a niektóre z nich mogą pracować nawet z częstotliwością 128 MHz!
Uproszczony schemat układu dystrybucji sygnałów zegarowych przedstawiono na rysunku 1. Po wybraniu jednego z pięciu dostępnych źródeł, mamy do dyspozycji aż trzy preskalery, umożliwiające taktowanie poszczególnych peryferiów mikrokontrolera różnymi zegarami. CLKCPU to zegar dla rdzenia procesora i może mieć maksymalnie 32MHz. CLKPER taktuje większość peryferiów. CLKPER2 i CLKPER4 służą do taktowania peryferiów zdolnych do pracy z zegarem szybszym od CLKCPU. Oprócz tego, mamy jeszcze osobne zegary dla RTC i USB, jeśli mikrokontroler jest wyposażony w te peryferia.
Rys. 1. Układ dystrybucji sygnałów zegarowych
Sposób wyboru źródła sygnału zegarowego sprowadza się do trzech punktów:
- Konfiguracja i uruchomienie generatora,
- Oczekiwanie na stabilizację generatora,
- Przełączenie źródła.
W tej części kursu napiszemy kilka funkcji, umożliwiających przełączenie źródła sygnału taktującego oraz obserwację efektów tej zmiany przy pomocy migającej diody i wyświetlacza LCD ze sterownikiem HD44780. Wykorzystamy wewnętrzny generator RC 2 MHz, 32 MHz, a także zewnętrzny generator kwarcowy i układ PLL. Schemat układu, wykorzystywanego podczas ćwiczeń, przedstawiono na rysunku 2, a jego zdjęcie jest na rysunku 3.
Rys. 2. Schemat układu demonstracyjnego
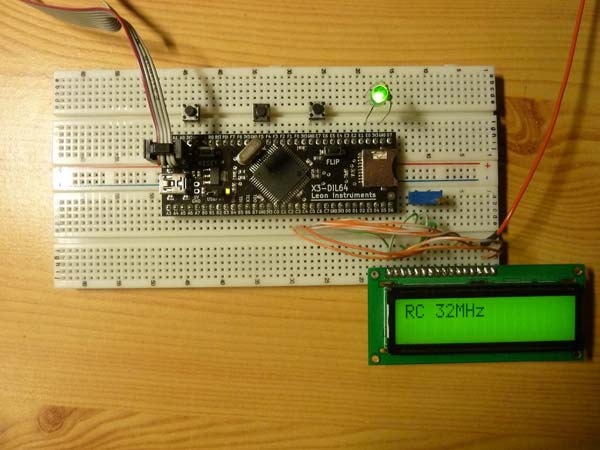
Rys. 3. Układ demonstracyjny zbudowany na płytce stykowej
Zacznijmy od przeanalizowania funkcji main().
#define F_CPU 62000000UL #include#include #include #include "hd44780.h" int main(void) { // zmienna uint8_t pll = 4; // diody PORTE.DIR = PIN0_bm; // dioda LED // przyciski PORTA.DIRCLR = PIN0_bm; // przycisk - RC 2MHz PORTA.PIN0CTRL = PORT_OPC_PULLUP_gc; // podciągnięcie do zasilania PORTE.DIRCLR = PIN5_bm; // przycisk FLIP - RC 32MHz PORTE.PIN5CTRL = PORT_OPC_PULLUP_gc; // podciągnięcie do zasilania PORTE.DIRCLR = PIN6_bm; // przycisk - XTAL PORTE.PIN6CTRL = PORT_OPC_PULLUP_gc; // podciągnięcie do zasilania PORTF.DIRCLR = PIN4_bm; // przycisk - PLL PORTF.PIN4CTRL = PORT_OPC_PULLUP_gc; // podciągnięcie do zasilania // wyświetlacz LCD LcdInit(); // komunikat o źródłe sygnału zegarowego LcdClear(); Lcd("RC 2MHz"); // włączenie przerwań sei(); while(1) { PORTE.OUTTGL = PIN0_bm; _delay_ms(50); if(!(PORTA.IN & PIN0_bm)) Osc2MHz(); if(!(PORTE.IN & PIN5_bm)) Osc32MHz(); if(!(PORTE.IN & PIN6_bm)) OscXtal(); if(!(PORTF.IN & PIN4_bm)) { pll++; // zwiększ zmienną pll if(pll > 31) pll = 1; // jeśli pll większe od 31 to ustaw na 1 OscPLL(pll); // funkcja konfigurująca PLL } } }
Zwróćmy uwagę na funkcję opóźniającą _delay_ms(50); Co w niej jest nie tak? Funkcja powoduje, że procesor kręci się w pustej pętli nic nie robiąc, aż upłynie żądany czas. Jednak funkcja _delay_ms() oblicza ilość potrzebnych cykli na podstawie definicji #define F_CPU 62000000UL. W przypadku kiedy częstotliwość taktowania się zmienia, to pamiętajmy, że standardowe funkcje opóźniające nie uwzględniają aktualnej częstotliwości, w związku z czym odmierzony czas nie będzie prawidłowy. Zaobserwujemy ten problem w naszym programie testowym – dioda podłączona do E0 będzie mrugać z różną częstotliwością, mimo że w pętli głównej jest _delay_ms(50) ze stałym argumentem równym 50.
Pliki źródłowe omawianego programu można pobrać na dole strony – będziemy używać biblioteki do obsługi wyświetlacza autorstwa Radosława Kwietnia, którą opisałem w 5 części kursu. W kolejnych odcinkach przedstawię, jak działają poszczególne generatory i jak skonfigurować ich rejestry kontrolne.
Dominik Leon Bieczyński
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 




