





Czujnik Halla TLE4966V firmy Infineon w praktycznych aplikacjach

Infineon Technologies to wiodący producent rozwiązań półprzewodnikowych dla systemów przemysłowych i motoryzacyjnych. Jedną z grup produktowych w ofercie tej firmy są zintegrowane czujniki Halla. Nowością w portfolio jest układ TLE4966V-1K – pierwszy na rynku podwójny, scalony czujnik Halla o ustawionych pionowo płaszczyznach detekcji, pozwalający mierzyć nie tylko prędkość obrotu, ale też jego kierunek.
Wstęp
W wielu zastosowaniach niezbędna jest informacja o prędkości i kierunku obrotu silnika. Można ją wygodnie uzyskać stosując czujnik Halla i namagnesowaną przemiennie tarczę, zamontowaną na osi silnika. Aby określić kierunek obrotu, wykorzystuje się dwa czujniki umiejscowione w pewnej odległości od siebie (rysunek 1). Informację o kierunku otrzymuje się analizując różnicę fazy sygnałów wyjściowych czujników S1 i S2. Układ TLE4966V-1K zawiera dwa czujniki Halla umieszczone w odległości 1.25 mm i oblicza kierunek obrotu samodzielnie. Informacja o nim jest podawana na dedykowane wyprowadzenie w postaci cyfrowej (stan wysoki lub niski, odpowiadające odpowiednio obrotowi w prawo lub w lewo), a prędkość obrotu wyprowadzona jest na osobny pin.
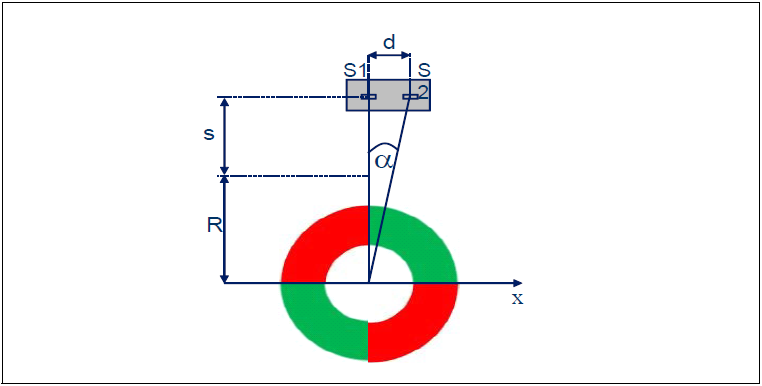
Rys. 1. Układ magnetyczny z namagnesowaną naprzemiennie tarczą i podwójnym czujnikiem Halla TLE4966V-1K
Pewność podawanej informacji o kierunku obrotu zależy od różnych parametrów oraz konstrukcji obwodu magnetycznego. W niniejszym tekście znaleźć można szereg wskazówek dotyczących projektowania tego obwodu oraz wyjaśnienie wpływu różnych parametrów (np. natężenia pola magnetycznego, geometrii namagnesowanej tarczy, odległości od czujnika) na wyniki pomiarów.
Mechanizm detekcji kierunku obrotu
Zaimplementowany w układzie TLE4966V-1K algorytm detekcji kierunku obrotu opiera się na fakcie, że generowane przez dwa czujniki Halla (S1 i S2) sygnały są przesunięte w fazie. Kierunek obrotu odpowiada znakowi przesunięcia fazowego, czyli odpowiedzi na pytanie „który czujnik przełącza się jako pierwszy?”. Na rysunku 2 przedstawiono schemat blokowy układu TLE4966V-1K.
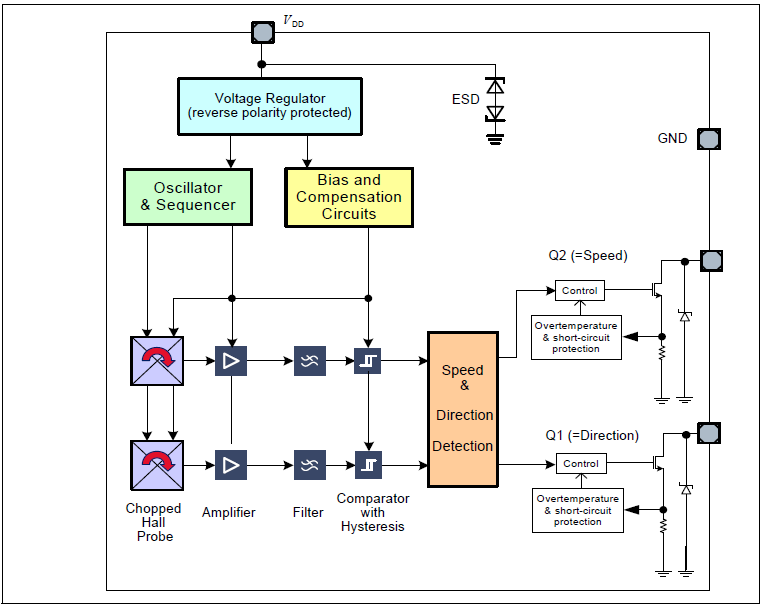
Rys. 2. Schemat blokowy układu TLE4966V-1K
Układ, nazywany podwójnym czujnikiem Halla, zawiera nie tylko dwa niezależne czujniki, ale też generator polaryzujący, obwody kompensujące, oscylator i tranzystory wyjściowe.
Generator polaryzujący dostarcza prąd do czujników Halla i układów aktywnych, a obwody kompensujące stabilizują pracę układu przy zmianach temperatury i niwelują różnice technologiczne.
Układ aktywnej kompensacji błędów redukuje natomiast offset sygnałów i wpływ naprężeń mechanicznych obudowy, pojawiających się w procesach jej formowania i lutowania oraz pod wpływem czynników termicznych, na detektory Halla. W połączeniu z generatorem progów i komparatorem zapewnia on precyzyjne ustalanie progów przełączania.
Algorytm detekcji kierunku obrotu wykorzystuje sygnały z dwóch komparatorów związanych z oboma czujnikami.
Na rysunku 3 przedstawione są dwa przesunięte w fazie sygnały z czujników S1 i S2.
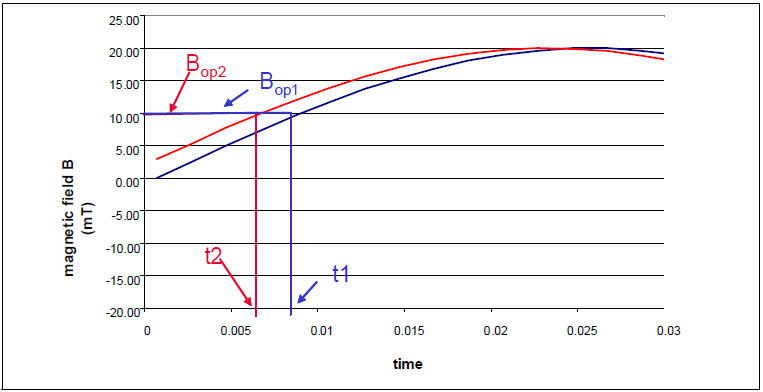
Rys. 3. Wewnętrzne sygnały z czujników Halla S1 i S2 z widocznym przesunięciem fazowym
W przypadku idealnym, magnetyczne parametry (Bop1, Bop2) dwóch czujników Halla są identyczne. W związku z przesunięciem fazowym, w przedstawionym na rysunku 3 przykładzie, czujnik S2 osiąga punkt pracy Bop2 wcześniej, niż czujnik S1, co określa obliczany kierunek obrotu.
W rzeczywistości jednak zawsze istnieje pewne niedopasowanie parametrów magnetycznych czujników, związane z procesem produkcyjnym i założonymi tolerancjami. Dopasowanie własności magnetycznych jest nazywane dopasowaniem magnetycznym i oznaczane BMatch (BMatch = Bop1 – Bop2). Dla układu TLE4966V-1K, parametr ten w temperaturze pokojowej ma wartość poniżej +/- 1 mT (dokładne informacje można znaleźć w nocie katalogowej).
Przy spełnieniu pewnych warunków może się zdarzyć, że podawana przez układ informacja o kierunku jest błędna. Zależy to od natężenia pola magnetycznego, geometrii układu magnetycznego oraz wartości parametru BMatch. Taki przypadek przedstawiony jest na rysunku 4, na którym widać, że czujnik S1 osiąga próg Bop1 wcześniej, niż czujnik S2, co prowadzi do błędnego – w stosunku do idealnego przypadku zaprezentowanego na rysunku 3 – określenia kierunku ruchu.
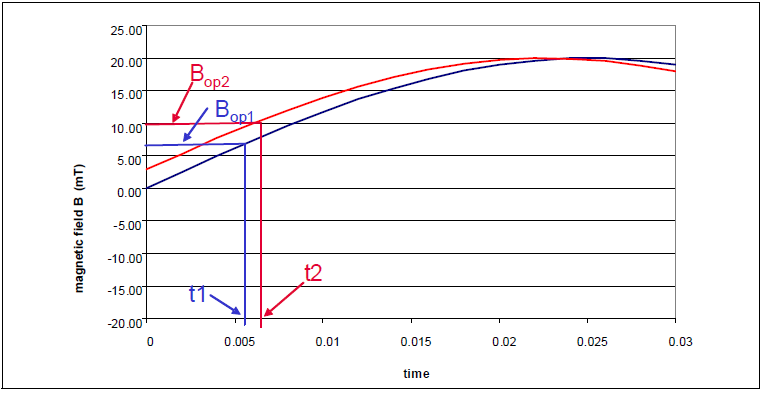
Rys. 4. Błędne określenie kierunku obrotu
W następnej części tekstu przedstawiony jest matematyczny opis tego efektu. Wykorzystując podane tam równania możliwe jest określenie czy układ magnetyczny jest wystarczająco niezawodny, by zawsze prawidłowo określić kierunek obrotu.
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






