





Czujnik Halla TLE4966V firmy Infineon w praktycznych aplikacjach
Opis matematyczny
Punktem wyjścia jest rysunek 1, na którym przedstawiono geometryczny model ustawienia czujnika. R to promień tarczy magnetycznej, s to odległość od tarczy do detektora, a d to odległość między czujnikami S1 i S2. Dla układu TLE4966V-1K d=1,25 mm. To dzięki tej odległości między sygnałami z czujników występuje przesunięcie fazowe, oznaczane φ. Można je wyliczyć z następującego równania, w którym N oznacza liczbę par biegunów magnetycznych namagnesowanej tarczy:
 (1)
(1)
Jest oczywiste, że im większa jest różnica faz, tym łatwiej prawidłowo określić kierunek obrotu.
Natężenia pola magnetycznego B1(t) i B2(t) w miejscach, gdzie znajdują się czujniki S1 i S2, przy założeniu sinusoidalnej zmienności natężenia pola, można wyrazić następującymi równaniami:
![]() (2)
(2)
Przełączenie czujników Halla nastąpi w chwilach t1 i t2, gdy tylko B1(t1)=Bop1 i B2(t2) = Bop2.
Wykorzystując równanie (2), chwile te można wyrazić jako:
 (3a)
(3a)
 (3b)
(3b)
Wprowadzając dopasowanie magnetyczne BMatch (BMatch = Bop1 – Bop2) otrzymujemy równanie 4:
 (4)
(4)
Tak długo, jak różnica t2 – t1 nie zmienia znaku, obliczony kierunek jest poprawny. Błąd określenia kierunku pojawia się, gdy przekraczana jest granica t2 = t1, która jest najgorszym możliwym przypadkiem, minimalnym warunkiem, jaki musi być spełniony, aby wskazanie było poprawne. Podstawienie do równania (4) φ z równania (1) daje ostateczną postać zależności:
 (5)
(5)
Dla s << s+R można przyjąć, że atan(x)=x, co prowadzi do równania (6):

W równaniu tym, Bop1 jest punktem pracy czujnika, B0 amplitudą natężenia pola magnetycznego w miejscu położenia detektora, BMatch opisuje dopasowanie magnetyczne, N i R określają liczbę par biegunów magnetycznych i promień namagnesowanej tarczy, a d=1,25 mm jest odległością między czujnikami Halla układu TLE4966. Równanie to można rozwiązać numerycznie i wyliczyć niego minimalną amplitudę natężenia pola magnetycznego B0, która jest niezbędna do niezawodnego określania kierunku obrotu dla danej tarczy i geometrii układu magnetycznego.
W związku z poczynionymi założeniami i uproszczeniami modelu, uzyskana wartość B0 jest tylko przybliżeniem, dającym jednak użyteczną wskazówkę, jeśli chodzi o możliwości detekcyjne danego układu magnetycznego. Przy projektowaniu takiego układu należy wziąć pod uwagę pewien margines bezpieczeństwa. Co więcej, nie można zapominać o zmianach właściwości materiału magnetycznego przy wahaniach temperatury. Generalnie, gęstość strumienia magnetycznego spada ze wzrostem temperatury, a szybkość spadku może wynosić do -2000 ppm/K dla magnesów ferrytowych. Przy projektowaniu należy więc wziąć pod uwagę możliwe wahania dla całego zakresu temperatur pracy urządzenia.
Przykład
W tej części artykułu przedstawiony zostanie przykład, ilustrujący zależność pewności informacji o kierunku obrotu od geometrii układu magnetycznego. Wyestymowana zostanie minimalna amplituda natężenia pola magnetycznego Bmin, konieczna do uzyskania prawidłowego określenia kierunku.
W przykładzie użyte zostały następujące parametry:
- Bop = 4,5 mT (najgorszy przypadek wg noty katalogowej układu TLE4966V-1K)
- Bm = +/– 1 mT – dopasowanie magnetyczne (najgorszy przypadek wg noty katalogowej)
- R = 7,5 mm – promień tarczy magnetycznej
- s = 2,5 mm – odległość między tarczą i elementem defekującym
- d = 1,25 mm – odległość między czujnikami Halla w układzie TLE4966V-1K
Rozważone zostały trzy różne liczby par biegunów magnetycznych (N = 1, 2, 3). Rozwiązane zostało równanie (5) i na jego podstawie określono punkt przecięcia zera (t1 = t2). Punkt ten pozwala znaleźć natężenie pola Bmin niezbędne do prawidłowego określenia kierunku obrotu (rysunek 5, rysunek 6, rysunek 7). Dla każdej z trzech wersji tarczy magnetycznej wykreślone zostały trzy krzywe dla BMatch = 1 mT, 0 mT i -1 mT.
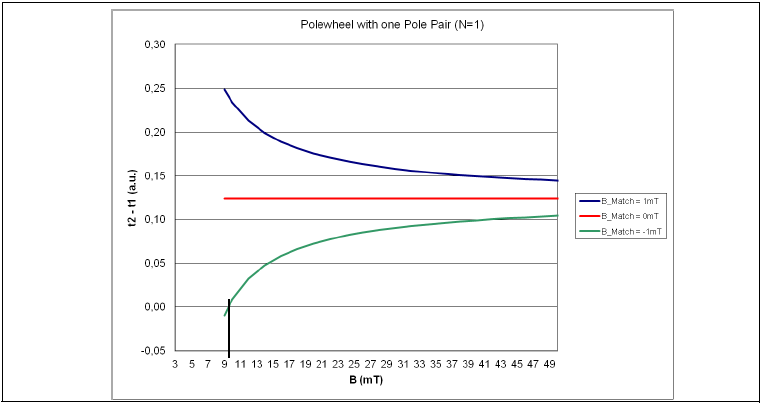
Rys. 5. Tarcza magnetyczna z N = 1, minimalne wymagane natężenie pola Bmin = 9 mT dla t2 – t1 = 0
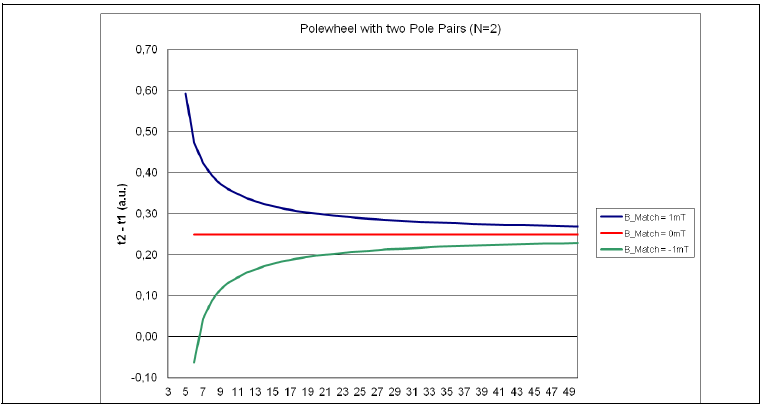
Rys. 6. Tarcza magnetyczna z N = 2, minimalne wymagane natężenie pola Bmin = 7 mT dla t2 – t1 = 0
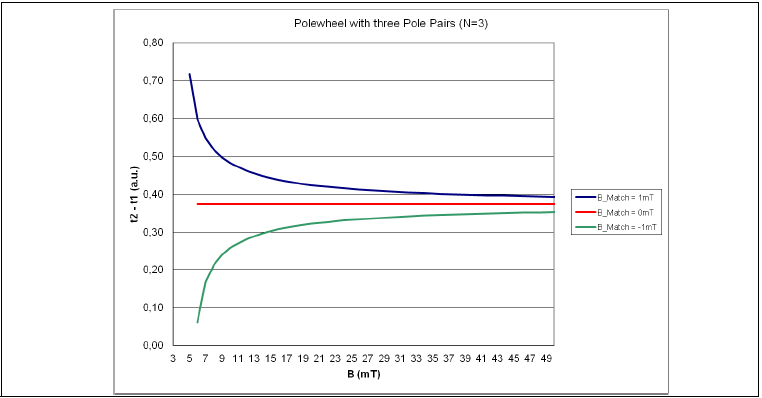
Rys. 7. Tarcza magnetyczna z N = 3, minimalne wymagane natężenie pola Bmin = 6 mT dla t2 – t1 = 0
Przy idealnym dopasowaniu magnetycznym (Bm = 0 mT) przełączenie (t2 -–t1) jest niezależne od natężenia pola B. W każdym przypadku otrzymana informacja o kierunku obrotu jest poprawna. To samo można powiedzieć dla Bm > 0 mT. Tylko jeśli dopasowanie jest ujemne może się pojawić błąd określenia kierunku obrotu. Wartość natężenia pola magnetycznego dla punktu przecięcia zera odpowiada minimalnej wartości koniecznej do uzyskania prawidłowego wskazania kierunku obrotu w ogóle. Dla wartości niższych możliwe jest uzyskanie wskazania błędnego. Jak widać, wymagane natężenie pola spada ze wzrostem liczby par biegunów magnetycznych. Dla tarczy magnetycznej z trzema parami biegunów (rysunek 7) wynosi ono 6 mT, a dla jednej pary biegunów wymagane jest natężenie ok. 9 mT. Uzyskiwane wyniki są znacznie lepsze w porównaniu z układem TLE4966V, co jest efektem dużo węższej specyfikacji parametru BMatch.
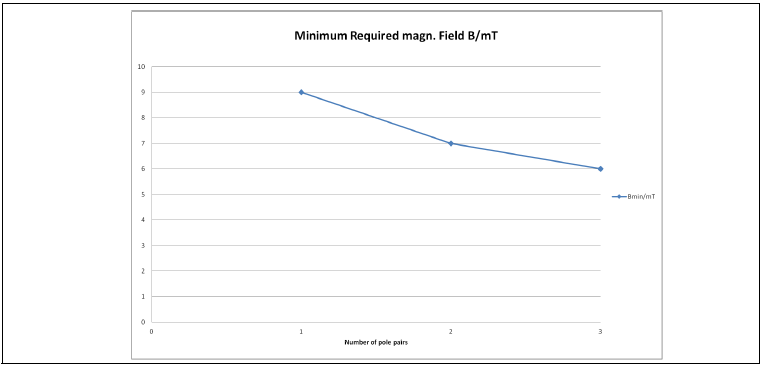
Rys. 8. Minimalne natężenie pola magnetycznego dla różnej liczby par biegunów magnetycznych przy Bm = -1 mT.
Podsumowanie
Podane wcześniej równania (5) i (6) można wykorzystać do określenia czy użyte układy magnetyczne są wystarczająco dobre, aby niezawodnie podawać prawidłową informację o kierunku obrotu. Znając geometrię tarczy magnetycznej i jej parametry (N, R, s) oraz biorąc pod uwagę najgorsze akceptowalne wartości z noty katalogowej (Bop, BMatch), można obliczyć minimalne wymagane natężenie pola magnetycznego Bmin w miejscu położenia czujników. Jeśli wartość ta jest wyższa, niż natężenie pola zapewniane przez używaną tarczę magnetyczną, możliwe jest pojawienie się fałszywych wskazań kierunku obrotu. W takich przypadkach warto zmienić układ magnetyczny, aby zwiększyć odporność na błędy. W zawiązku z tym, że w podanych równaniach użyto przybliżeń i uproszczeń, konieczne jest też uwzględnienie marginesu bezpieczeństwa, celem zapewnienia bezproblemowej pracy w różnych warunkach.
Artykuł powstał w oparciu o tłumaczenie noty aplikacyjnej firmy Infineon Technologies pod tytułem „Magnetic Circuit Design for Correct Direction Detection of TLE4966V”.
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






