





MGC3130: jednoukładowy kontroler sensora gestów 3D (Microchip GestIC)

W zależności od tego, czy sterowanie pracą urządzenia ma się odbywać za pomocą dłoni lub palca, wymiary i budowa zestawu anten są różne. Generalna zasada jest we wszystkich przypadkach identyczna: system składa się z 5 elektrod (anten) odbiorczych i 1 nadawczej, ale ich wzajemne rozmieszczenie i wymiary są zależne od wymogów aplikacji, co producent dokładnie opisał w dokumentacji technicznej (GestIC Design Guide: Electrodes and System Design MGC3130). Zastosowana przez producenta technologia detekcji położenia ręki pozwala na tanią implementację sensorów, które mogą być wykonywane na laminacie FR4, płytkach z tworzywa sztucznego, tekturze i wielu innych materiałach dielektrycznych. Elektrody nadawcze i odbiorcze mogą być naklejane, wytrawiane, napylane lub nanoszone za pomocą przewodzących lakierów.
|
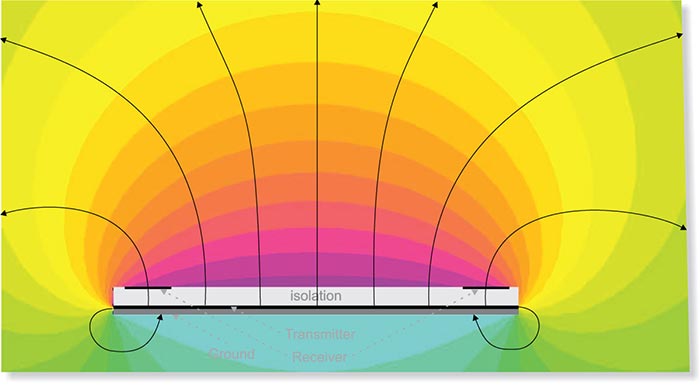
Zasada działania układu MGC3130 Technologia GestIC bazuje na emisji zmiennego pola elektromagnetycznego o częstotliwości ok. 100 kHz, którego długość fali wynosi ok. 3 km. W odniesieniu do wymiarów ekranu, długość emitowanej fali jest nieskończenie duża, co powoduje, że składowa magnetyczna jest bliska zeru, co w przybliżeniu pozwala traktować emitowane pole jako „czysto” elektryczne. Pole to – ze swej natury – chętnie „zamyka” się w obiektach przewodzących prąd elektryczny, do takich należy ciało ludzkie, składające się w znacznym stopniu z elektrolitów. |
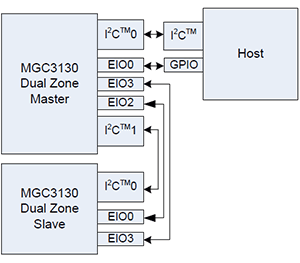
Rys. 5. Schemat połączeń pomiędzy układami MGC3130 umożliwiających ich pracę dwustrefową (niezależne sterowanie dwoma rękami)
Układ MGC3130 jest w stanie samodzielnie śledzić jeden ruchomy obiekt (rękę), ale producent przewidział możliwość – po odpowiednim połączeniu ze sobą dwóch układów tego typu – ich konfiguracji dwustrefowej (rysunek 5), co pozwala na budowanie bardzo złożonych interfejsów komunikacyjnych, w których użytkownik może używać niezależnie dwóch rąk.
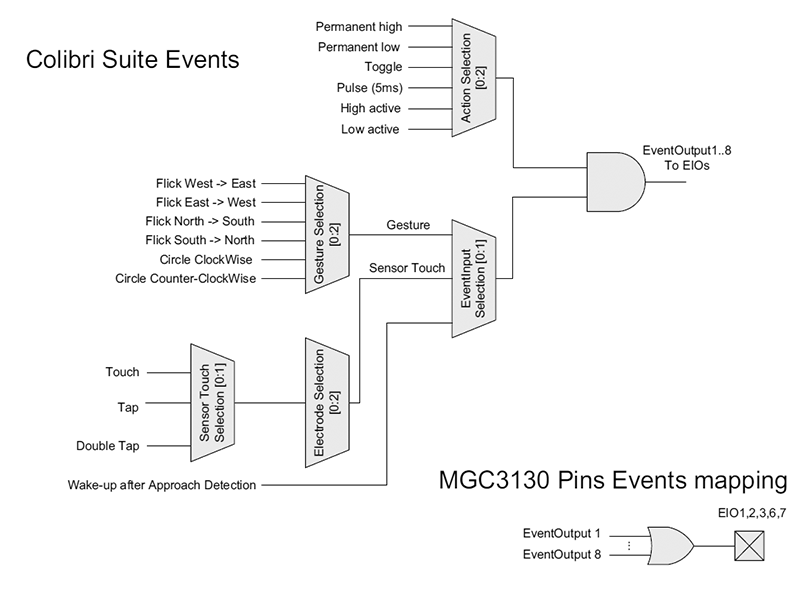
Rys. 6. Schemat konfigurowalnego bloku logicznego odpowiadającego za zgłaszanie przerwań związanych z wykryciem określonych gestów
Komunikacja pomiędzy kontrolerami MGC3130 oraz mikrokontrolerem zarządzającym ich pracą odbywa się za pomocą niezależnych od siebie interfejsów I2C oraz konfigurowalnych linii I/O. Użytkownik może programowo wymusić sygnalizowanie przez kontroler mikrokontrolerowi zarządzającemu wykonanie przez użytkownika określonego gestu, co powoduje – po jego wykryciu – zgłoszenie przerwania. Schemat konfigurowalnej części logicznej odpowiadającej za zarządzanie przerwaniami pokazano na rysunku 6.
Za detekcję gestów oraz wykrywanie trajektorii ruchu odpowiada w MGC3130 oprogramowanie, które steruje pracą wbudowanego w kontroler procesora sygnałowego. Oprogramowanie to nosi nazwę ColibriSuite, jest ono przechowywane w wewnętrznej pamięci Flash układu MGC3130. Producent cały czas je rozwija, dzięki czemu jakość działania algorytmów wykrywających gesty jest coraz lepsza, zwiększana jest także liczba gestów rozpoznawanych przez oprogramowanie. Jedną z nowych możliwości aktualnej wersji biblioteki ColibriSuite jest detekcja pojedynczych i podwójnych puknięć w powierzchnię sensora, co pozwala użytkownikom implementować – poza interfejsem 3D – także interaktywne lub statyczne klawiatury.
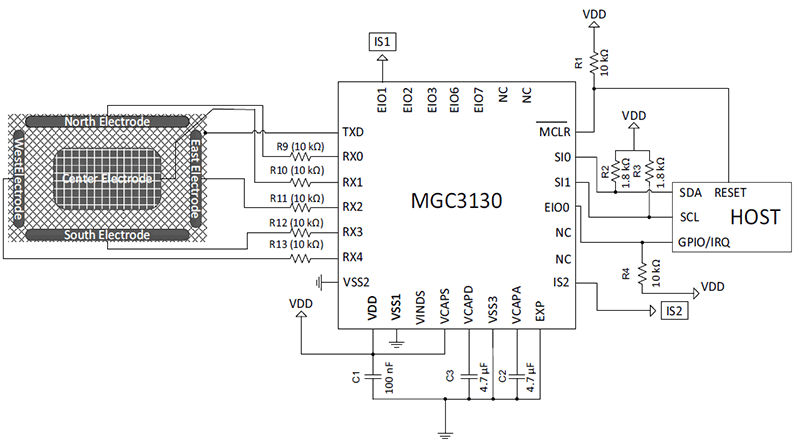
Rys. 7. Schemat aplikacyjny układu MGC3130
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






