





[ARDUINO, EAGLE i TY] Biblioteki Arduino dla sterownika H silnika elektrycznego
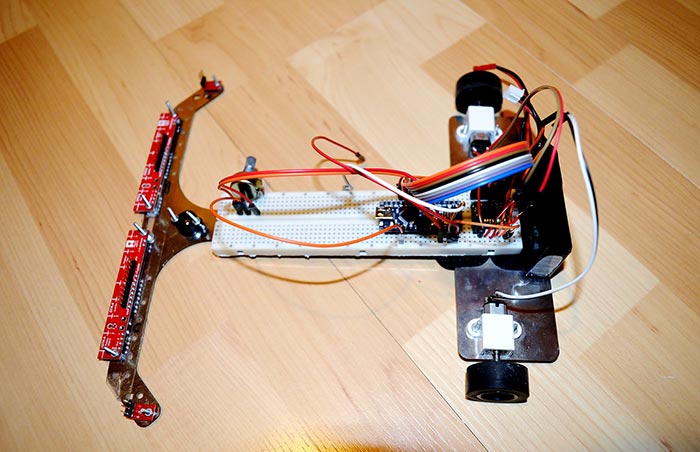
W artykule opisałem sposób przygotowania płytki drukowanej integrującej moduły: sterownika silników oraz Arduino Nano. W tym artykule skupię się na prezentacji przygotowania oprogramowania w środowisku Arduino, testy zostaną przeprowadzone na robocie NesPiDi który startował w tegorocznych zawodach Robomaticon.
Aby rozpocząć pracę nad programem powinniśmy zaopatrzyć się następujące podzespoły:
- Moduł Arduino Nano
- Moduł sterownika silników z układem TB6612
- Płytkę stykową
- Zestaw kabli
- Silniki wraz z mocowaniami, kołami i ogumieniem
- Akumulator (w moich projektach wykorzystuję Li-Poly 7,4V)
- Podwozie robota wykonane z dowolnego materiału
Poprzedzając pisanie programu powinniśmy wykonać połączenia zgodnie z rysunkiem 1.
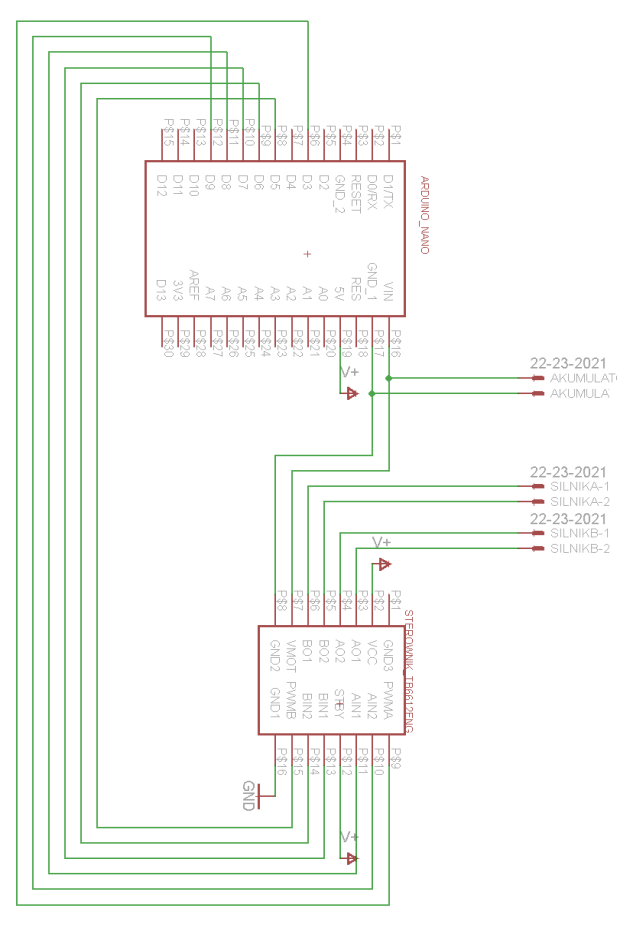
Rys. 1. Schemat połączeń elektrycznych niezbędnych do przetestowania tworzonych bibliotek
Do sterowania pracą silnika wykorzystamy następujące porty:
- sterowanie prędkościami silników: pwmA port 3 oraz pwmB port 5,
- sterowanie kierunkiem pracy silników: silnik A porty 6 i 7 oraz silnik B porty 8 i 9.
Sygnał PWM jest sygnałem z regulowaną wartością wypełnienia. Dla przykładu na rysunku 2 pokazano kilka charakterystycznych wartości.
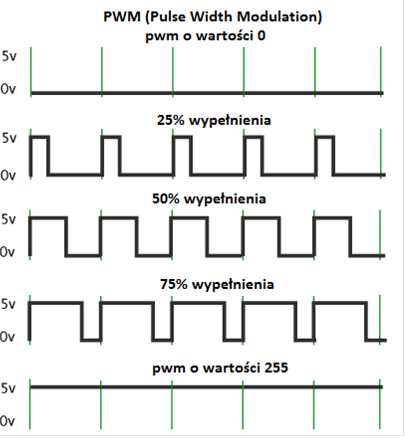
Rys. 2. Sygnały PWM o różnych wartościach współczynnika wypełnienia
Po podłączeniu poniższego układu rozpoczynamy programowanie. W nagłówku programu umieszczamy adresy wszystkich portów, z których będziemy korzystać podczas dalszej części. Sygnały PWM zostały podłączone do portów cyforwych c oraz 5. Ta informacja w kodzie będzie wyglądać w sposób następujący:
int pwmA=3; //pin portu pwm sterującego prędkością silnika A int pwmB=5; //pin portu pwm sterującego prędkością silnika B
Sterowanie kierunkami pracy silników odbywać się będzie przy wykorzystaniu portów cyfrowych, 6 i 7 dla silnika A oraz 8 i 9 dla silnika B. W związku z uproszczeniem kodu oraz możliwości modyfikacji adresu portów zostały one zapisane w postaci tablicy.
Zapis w kodzie:
int sterowanie_silnikami[4]={6,7,8,9};
//sterowanie_silnikami[1]i[2] przypisane do silnika A
//sterowanie_silnikami[3]i[4] przypisane do silnika B
Kolejnym etapem jest ustawienie opisanych portów jako wyjścia. Do tego celu wykorzystamy funkcję pinMode.
void setup()
{
pinMode(sterowanie_silnikami[0],OUTPUT);
pinMode(sterowanie_silnikami[1],OUTPUT);
pinMode(sterowanie_silnikami[2],OUTPUT);
pinMode(sterowanie_silnikami[3],OUTPUT);
pinMode(pwmA,OUTPUT);
pinMode(pwmB,OUTPUT);
//ustawienie wszystkich portów sterujących jako wyjścia
}
Tab. 1. Tabela prawdy działania sterownika silników
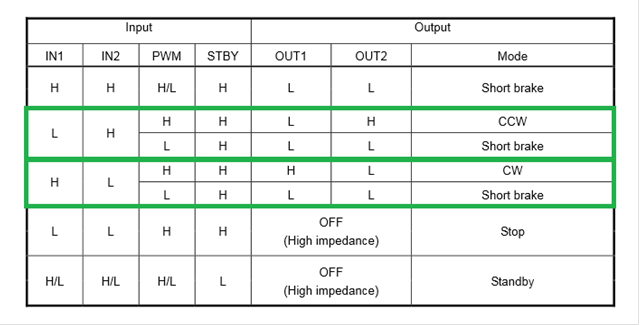
Przy pierwszych projektach najważniejszymi nastawami będą oznaczone kolorem zielonym na rysunku trzecim. Kierunek do przodu oraz kierunek przeciwny uzyskamy wykorzystując następujący kod:
void loop()
{
digitalWrite(sterowanie_silnikami[0],LOW);
digitalWrite(sterowanie_silnikami[1],HIGH);
//dla silnika A
digitalWrite(sterowanie_silnikami[2],LOW);
digitalWrite(sterowanie_silnikami[3],HIGH);
//dla silnika B
delay(10);
}
Powyższy kod umożliwia jedynie ustawienie kierunku pracy silnika. Nie nadaje mu jednak prędkości. Aby silniki poruszały się z odpowiednią prędkością należy na port pwm podać wartość z przedziału (0;255). Dokonamy tego w następujący sposób:
void loop()
{
int predkosc;
digitalWrite(sterowanie_silnikami[0],LOW);
digitalWrite(sterowanie_silnikami[1],HIGH);
analogWrite(pwmA, predkosc);
//dla silnika A
digitalWrite(sterowanie_silnikami[2],LOW);
digitalWrite(sterowanie_silnikami[3],HIGH);
analogWrite(pwmB, predkosc);
//dla silnika B
delay(10);
}
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



