





[NOWY FRAMEWORK] Microchip Harmony dla PIC32, część 2
Zobaczmy teraz jak wygląda możliwość przeniesienia naszego programu na inny mikrokontroler. Do tego celu zostanie wykorzystany moduł PIC32MZ EC Starter Kit z mikrokontrolerem PIC32MZ2048ECH144. Pracę z nowym mikrokontrolerem zaczynamy od utworzenia nowego projektu, uruchomienia MHC i skonfigurowania układu taktowania. Mikrokontrolery PIC32MZ mogą być taktowane częstotliwością do 200MHz, ale dla uproszczenia taktowanie będzie się odbywało z taką samą częstotliwością jak w module z PIC32MX czyli z 80MHz.
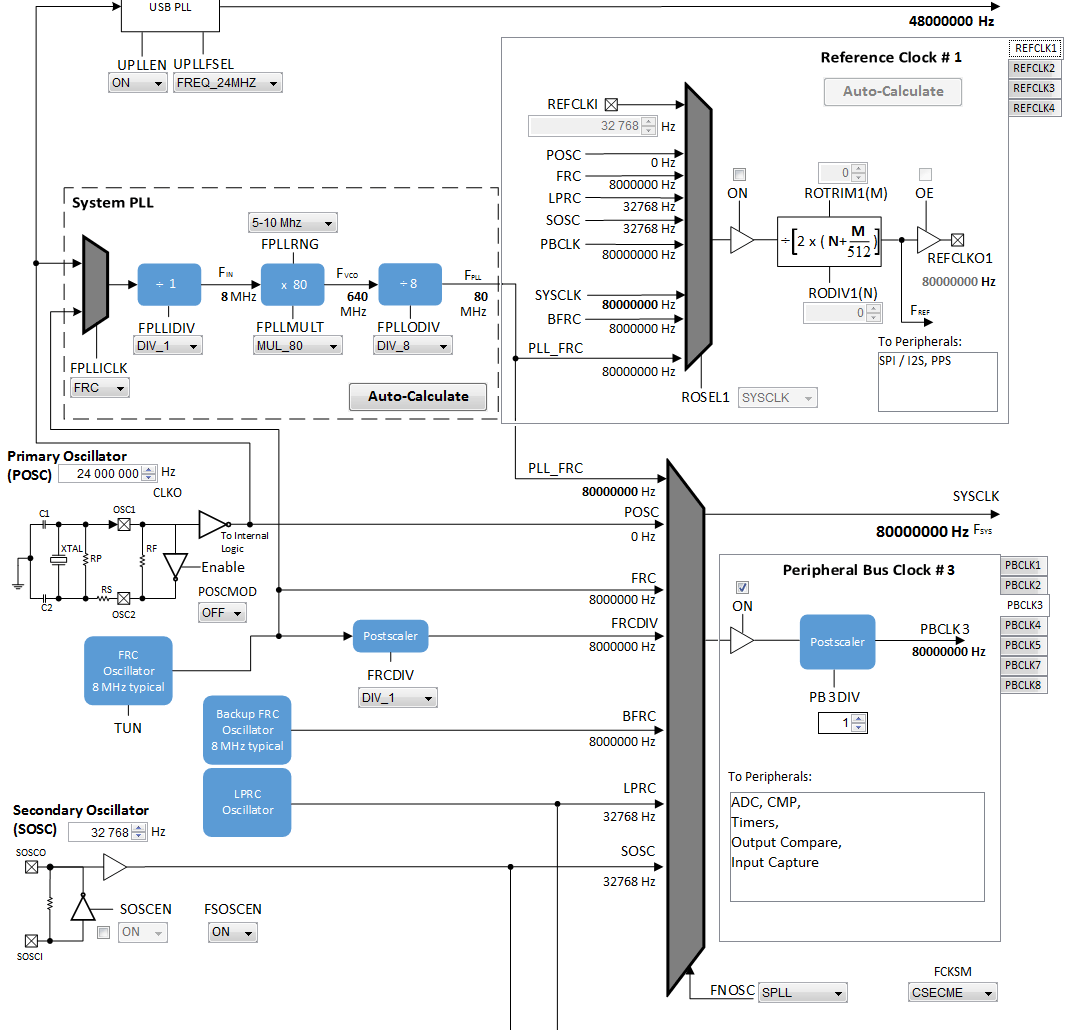
Rys. 14. Konfiguracja taktowania mikrokontrolera PIC32MZ
Na rysunku 14 pokazano okno MPLAB Harmony Clock Configuration dla układu taktowania mikrokontrolerów PIC32MZ. Źródłem sygnału zegarowego został wybrany wewnętrzny oscylator RC o częstotliwości 8MHz. Ten sygnał jest podawany na układ PLL, gdzie jest potem powielany przez 80 i dzielony przez 8. Taktowanie układów peryferyjnych jest podzielone na 8 grup. Dla każdej z tych grup można zdefiniować różne częstotliwości taktowania. Nas interesuje moduł liczników taktowany przez sygnał PBCLK3. Tu również ustawimy częstotliwość 80MHz.
W kolejnym kroku trzeba dodać konfigurację drivera Timer4/5 dokładnie tak samo jak w poprzednim przykładzie, oraz konfigurację BSP z modułem PIC32MZ EC Starter Kit. Kiedy te wszystkie czynności zostaną wykonane, to trzeba wygenerować pliki źródłowe (MHC – Generate) i zmodyfikować procedurę APP_Tasks. Ja po prostu skopiowałem całą funkcję z projektu z mikrokontrolerem PIC32MX. Włączenie opcji wsparcia modułów firmowych BSP spowodowało wygenerowanie definicji linii sterujących diodami LED. Jedyna modyfikacją jaką należy wprowadzić jest definicja portu. Diody LED są sterowane w module PIC32MX USB starter Kit II z portu PORTD, a w module PIC32MZ EC Starter Kit z portu PORTH.
List. 13. Funkcja APP_Tasks dla projektu z PIC32MZ
void APP_Tasks (void )
{
/* Check the application's current state. */
switch (appData.state )
{
/* Application's initial state. */
case APP_STATE_INIT:
{
SYS_PORTS_PinDirectionSelect(PORTS_ID_0, SYS_PORTS_DIRECTION_OUTPUT, PORT_CHANNEL_H ,BSP_LED_1);
SYS_PORTS_PinDirectionSelect(PORTS_ID_0, SYS_PORTS_DIRECTION_OUTPUT, PORT_CHANNEL_H ,BSP_LED_2);
DRV_TMR0_Start();
DRV_TMR0_CounterClear();
appData.state=APP_LED_ON;
break;
}
case APP_LED_ON :
{
led=led&1;
if(led==1)
{SYS_PORTS_PinSet(PORTS_ID_0,PORT_CHANNEL_H ,BSP_LED_1);
SYS_PORTS_PinSet(PORTS_ID_0,PORT_CHANNEL_H ,BSP_LED_2);
appData.state=APP_LED_OFF;}
}
case APP_LED_OFF :
{
led=led&1;
if(led==0)
{SYS_PORTS_PinClear(PORTS_ID_0,PORT_CHANNEL_H ,BSP_LED_1);
SYS_PORTS_PinClear(PORTS_ID_0,PORT_CHANNEL_H ,BSP_LED_2);
appData.state=APP_LED_ON;}
}
case APP_NOP:
{
;
}
/* The default state should never be executed. */
default:
{
/* TODO: Handle error in application's state machine. */
break;
}
}
}
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






