





[PROJEKT] MCP19111: „triakowy” ściemniacz LED bez efektu migotania
Jedną z istotnych cech każdego sterownika LED, który wykorzystuje ściemniacz oparty na triaku, jest powodowanie niepożądanego migotania. Trudno uniknąć tego efektu, zwłaszcza w niskim zakresie poziomu przyciemnienia z wykorzystaniem triaka.

W artykule przedstawiamy projekt sterownika LED wykorzystujący układ MCP19111 firmy Microchip. Jest to analogowy kontroler zasilania wzbogacony o cyfrowe funkcje. Układ może między innymi wysterować diody LED za pomocą triaka w bardzo szerokim zakresie prądów od 1 mA do 750 mA bez migotania diody. Płytka demonstracyjna MCP19111_EVAL (ADM00397) stanowi platformę sprzętową umożliwiającą wysterowanie pojedynczej diody LED.
W dalszej części zostały także opisane sposoby na wysterowanie diod LED pracujących w szerokim zakresie napięć zasilania.
Charakterystyka hybrydowego kontrolera zasilania
Przedstawiony projekt wykorzystuje cechy hybrydowych kontrolerów zasilania z nowej rodziny MCP1911x. Nowa rodzina produktów składa się z trzech par analogowych układów mocy wzbogaconych o funkcje cyfrowe. Każdy z nich jest przeznaczony dla konkretnych topologii konwertera mocy. Model MCP19111 obsługuje synchroniczne przetwornice obniżające napięcie.
„Hybrydowa” zasada działania oznacza, że obok możliwości konwersji mocy, układy te mają funkcje typowe dla mikrokontrolerów. Wbudowany 8-bitowy mikrokontroler PIC w układach MCP1911x udostępnia takie funkcje, jak watchdog, 11 pinów ogólnego przeznaczenia (GPIO), 12-kanałowy przetwornik analogowo-cyfrowy (ADC) o rozdzielczości 10 bitów oraz układ peryferyjny I2C kompatybilny z SMBus/PMBus.
Opisywany projekt oświetlenia LED wykorzystuje układ MCP19111 do wysterowania pojedynczej diody LED dużej mocy – model LUXEON Rebel firmy Philips. Dioda ma wejście AC 12 V przeznaczone do przyciemniania triakiem. Topologia konwersja napięcia to synchroniczna przetwornica obniżająca napięcie. Schemat typowego obwodu MCP19111 wzięty bezpośrednio z karty katalogowej jasno pokazuje, że za pomocą tego układu można łatwo zrealizować przetwornicę, co widać na rysunku 1.
Wyprowadzenia MCP19111 są niemal równo podzielone między obsługę PIC (po lewej) a obsługę elementów synchronicznej przetwornicy (po prawej). Warto również zauważyć, że większość pinów związanych z mikrokontrolerem PIC jest wielofunkcyjna.
Rys. 1. Układ MCP19111 może pracować w prostym obwodzie lub dynamicznie kontrolować pracę elementów synchronicznej przetwornicy obniżającej napięcie w zależności od komend hosta
Z tego powodu MCP19111 może pracować w prostym obwodzie, jak również dynamicznie kontrolować pracę synchronicznej przetwornicy obniżającej napięcie w zależności od komend hosta przesyłanych magistralą PMBus lub interfejsem I2C. Niezależnie od tego wszystkie piny związane z obsługą przetwornicy muszą być podłączone, jak na rysunku 1.
Schemat pokazuje, że MCP19111 jest w praktyce analogowym kontrolerem synchronicznej przetwornicy sterowanym cyfrowo. Układ pracuje pod nadzorem oddzielnego mikrokontrolera, który może obsługiwać osobną aplikację. Po skonfigurowaniu programowalnych elementów synchronicznej przetwornicy może ona pracować bez dalszego udziału rdzenia PIC.
Gotowa platforma sprzętowa
System opisany poniżej wykorzystuje płytkę testową MCP19111 bez żadnej modyfikacji w warstwie sprzętowej. Kod obsługujący system wykorzystuje istniejący fragment kodu dostarczony przez Microchip o nazwie „Buck Power-Supply Application”. Modyfikacje i rozszerzenia potrzebne do realizacji sterownika LED zostały w pełni opisane i są dostępne na stronie.
Narzędzie programistyczne Design Analyzer 1.1 opracowane przez Microchip pozwala użytkownikowi zoptymalizować częstotliwość przełączania płytki i charakterystykę pętli kontroli oraz dobrać wartości oporników, kondensatorów i cewek w celu uzyskania żądanego prądu i napięcia na wyjściu. Okienko z pięcioma zakładkami prowadzi użytkownika krok po kroku i może również służyć do realizacji opisywanego tu systemu. Narzędzie jest dostępne na stronie.
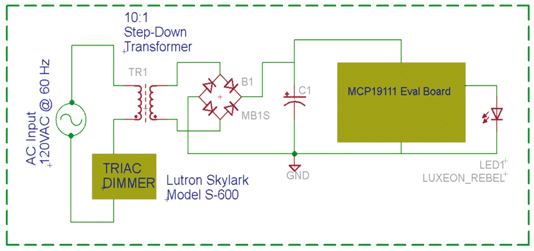
Rys. 2. Schemat testowy dla sterownika przyciemniającego LED opartego na MCP19111
Aby ocenić zachowanie systemu została zestawiona konfiguracja testowa, taka jak na rysunku 2. Wyjście AC ściemniacza przechodzi przez transformator obniżający napięcie w stosunku 10:1 (TR1) i wysterowuje mostek diodowy. Sygnał na wyjściu prostownika jest filtrowany przez aluminiowy elektrolityczny kondensator (C1) i dociera do wejścia napięciowego płytki testowej MCP19111. Wiele triakowych ściemniaczy zostało przetestowanych, aby zapewnić ich kompatybilność z systemem.
Prąd obciążenia płynący przez triak wynosi około 1:10 prądu obciążenia na wejściu płytki testowej MCP19111 za sprawą transformatora obniżającego napięcie w stosunku 10:1. W przypadku tego systemu o względnie niskim zużyciu mocy oznacza to maksymalny pobór poniżej 3 W, zatem prąd obciążenia będzie mniejszy od typowego prądu podtrzymującego pracę triaka. Można to wywnioskować na podstawie następującej zależności:
Istnieją triaki o czułych bramkach, które pozwalają na pracę z prądem znacznie poniżej tej wartości, w przypadku adaptacji starych urządzeń takie triaki mogą nie być odpowiednie. Takie urządzenia stanowią najgorszy przypadek, w którym prąd podtrzymujący pracę triaka jest wyższy od prądu obciążenia.
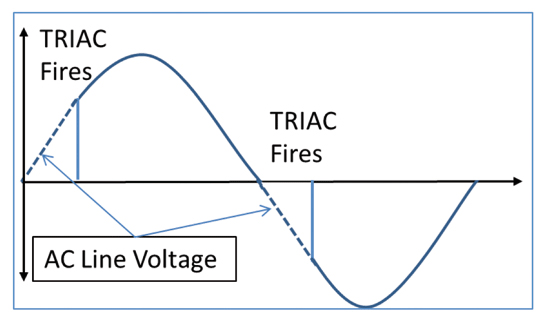
Rys. 3. Przebiegi na wyjściu triaka przed mostkiem
Gdy prąd obciążenia triaka spadnie poniżej prądu podtrzymania, triak nie załączy się poprawnie. W efekcie będzie się szybko włączał i wyłączał w trakcie dodatniego półokresu napięcia, co przedstawia rysunek 4. W wielu obwodach sterowników LED spowoduje to widoczne migotanie, które jest całkowicie niedopuszczalne z punktu widzenia użytkownika.
Sygnał po przejściu przez mostek diodowy i kondensator filtrujący zostaje po prostu przekształcony na napięcie zmienne ze składową stałą, co widać na rysunkach 3 i 4. Oczywiście wartość średniokwadratowa sygnału będzie znacznie niższa w przypadku rysunku 4 niż 3, ale nie ma to znaczenia. Dopóki wartość wyprostowanego i przefiltrowanego sygnał jest wyższa, niż pewien próg konwersji (V_In_Min_Conv), układ MCP19111 będzie pobierał prąd z kondensatora i dostarczał go do obciążenia.
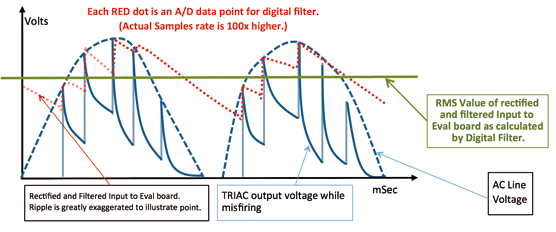
Rys. 4. Przebiegi na wyjściu triaka po przejściu przez mostek i filtr
Ponieważ triak może pracować niepoprawnie bez końca, jak na rysunku 4, w takim wypadku do obciążenia można dostarczyć bardzo mały prąd bez wyłączania ani zaburzenia pracy diody emitującej światło. W użytej konfiguracji testowej (rysunek 2) udaje się utrzymać prąd o wartości 1 mA.
Algorytm
Na rysunku 5 przedstawiono schemat blokowy algorytmu zakodowanego w układzie MCP19111 sterującym zasilaczem impulsowym. Opisuje on stan początkowy po inicjalizacji.
Po uruchomieniu program wstrzymuje jakiekolwiek przełączanie tranzystorów FET, dopóki napięcie wejściowe nie przekroczy wartości 5,0 V na przynajmniej 100 ms. Po spełnieniu tego warunku algorytm przechodzi w tryb zarządzania prądem obciążenia. W tym trybie prąd wyjściowy jest określany przez iloczyn wartości docelowej i stosunku wartości napięcia na wejściu płytki (V_Input_New) do oczekiwanej wartości nominalnej (V_nom), co opisuje poniższy wzór:
W dalszych krokach wartość prądu wyjściowego jest zwiększana lub zmniejszana o jeden krok lub też ustawiana na wartość minimalną lub maksymalną.
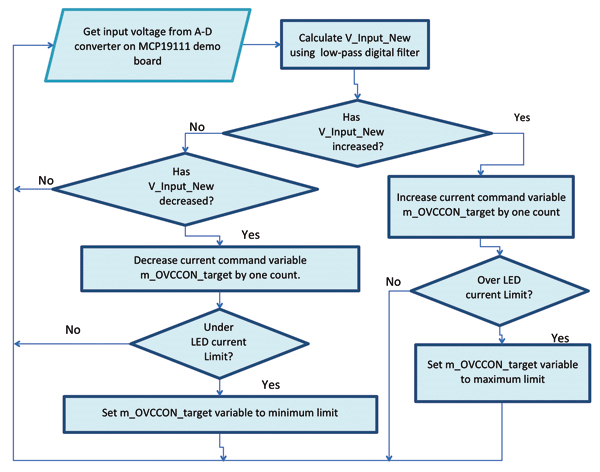
Rys. 5. Algorytm aplikacji sterującej diodą LED z wykorzystaniem MCP19111
Z powyższego równania wynika, że nie ulega zmianie długość półokresu triaka. Zmiana wartości średniokwadratowej napięcia po prostowaniu i filtracji zostanie potraktowana tak samo bez względu na to, czy wynika ona ze zmiany długości półokresu a triaka, czy ze zmiany wartości napięcia zmiennego na wejściu.
Rozszerzanie możliwości systemu
Opisany system stanowi bazę, na której projektanci mogą tworzyć lepsze i bardziej rozbudowane rozwiązania w oparciu o układ MCP19111. Przykładowo, obwód wykorzystujący MCP19111 i płytka testowa mogą zostać zmodyfikowane, aby obsłużyć większy zakres napięć wejściowych i wyjściowych. Można też zrealizować bezpośrednie analogowe przyciemnianie lub skorygować zmiany poziomu napięcia AC niezależne od długości półokresu triaka.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






