





[1] Pierwsze kroki z STM32F0DISCOVERY: od czego zacząć
Uwaga! Opublikowane odcinki kursu są dostępne pod adresem.
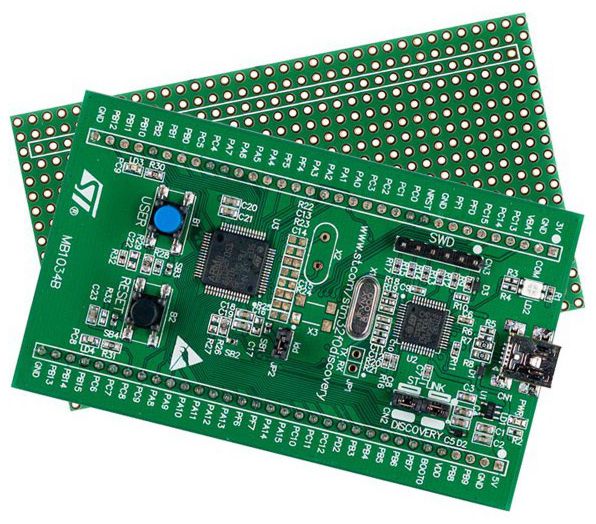
Przedstawiamy pierwszy odcinek ekspresowego kursu, który ma na celu wprowadzenie inżynierów w świat mikrokontrolerów STM32. Przykłady programów są przeznaczone dla płytki ewaluacyjnej STM32F0DISCOVERY firmy STMicroelectronics. Zaprezentowane projekty obejmują niemal wszystko, co można zaprezentować korzystając z płytki STM32F0DISCOVERY, bez konieczności dołączana do niej zewnętrznych układów elektronicznych.
Samouczek jest dedykowany szczególnie tym projektantom, którzy stają przed perspektywą zmiany mikrokontrolera z 8-bitowego na nowszy i tańszy 32-bitowy. Wszystkie programy są pisane w języku C. W przykładach nie użyto bibliotek służących do obsługi peryferiali, dzięki czemu kod programów jest krótki i czytelny, a zajętość pamięci znacznie mniejsza, niż w typowych programach demonstracyjnych, udostępnianych przez producentów mikrokontrolerów. Zwrócono również szczególną uwagę na poprawność prezentowanych rozwiązań i sposób zapisu programu ułatwiający optymalizację kodu i wychwytywanie błędów przez kompilator. Przedstawione programy zostały napisane w taki sposób, że nie generują one żadnych ostrzeżeń kompilatora.
Środowisko Keil MDK-ARM
Przykłady programów zostały przygotowane przy użyciu środowiska MDK-ARM firmy Keil dla systemu Windows, którego darmową wersję ewaluacyjną z ograniczeniem długości kodu do 32 KiB można pobrać z portalu www.keil.com. Spośród wielu dostępnych środowisk programowania dla mikrokontrolerów z rdzeniami ARM, MDK-ARM wyróżnia się łatwością przygotowania do pracy i tworzenia pierwszych projektów, jest więc to dobry wybór dla stawiających pierwsze kroki w programowaniu mikrokontrolerów z rdzeniami Cortex-M.
Przed rozpoczęciem działań z STM32F0 należy pobrać i zainstalować aktualną wersję środowiska. Prezentowane przykłady zostały stworzone przy użyciu wersji 4.70 i 4.60.
Wszystkie przykładowe projekty opisane w tekście znajdują się w pliku F0tutorial.zip (do pobrania poniżej). Po rozpakowaniu pliku do nowego foldera projekty można otworzyć przy użyciu środowiska Keil indywidualnie (klikając na pliku projektu z rozszerzeniem .uvproj) lub poprzez plik przestrzeni roboczej f0tutorial.umpw. Warto jednak stworzyć je od nowa samodzielnie, nabierając w ten sposób wprawy w posługiwaniu się środowiskiem.
Przygotowanie do pracy z STM32F0DISCOVERY
Po zainstalowaniu środowiska w komputerze, przed pierwszym podłączeniem modułu Discovery, należy w folderze, w którym zostało zainstalowane środowisko (domyślnie C:\Keil) odnaleźć folder ARM\STLink\USBdriver i uruchomić zawarty w nim instalator ST?Link_V2_USBdriver.exe. Następnie należy podłączyć moduł Discovery i korzystając z dialogu instalacji drivera w systemie, przerwać poszukiwanie drivera w sieci. System Windows powinien odnaleźć świeżo zainstalowany driver i skonfigurować go do pracy z płytką Discovery.
Uwaga: Próby instalacji drivera STLink w inny sposób często kończą się niepowodzeniami.
Po rozpoznaniu modułu Discovery (co zostaje potwierdzone ciągłym świeceniem większej z czerwonych diod umieszczonych na płytce w okolicy złącza USB) należy zaktualizować wbudowane oprogramowanie ST-Link, uruchamiając z foldera ARM\STLink program ST?LinkUpgrade.exe.
Tworzenie projektu
Na początek stworzymy projekt z programem, który nic nie robi oraz przyjrzymy się procesowi tworzenia projektu i budowie modułu startowego:
- Wybieramy z menu opcję Project – new ?Vision Project
- Wybieramy lokalizację projektu. Warto założyć folder grupujący wszystkie projekty, a w nim dopiero folder projektu. Pierwszemu projektowi nadamy nazwę Empty.
- Po wprowadzeniu nazwy projektu wybieramy producenta i typ mikrokontrolera – w naszym przypadku STMicroelectronics STM32F051R8.
- Akceptujemy sugestię wygenerowania przez środowisko pliku startowego i włączenia go do projektu.
W ten sposób stworzyliśmy pierwszy, niekompletny jeszcze projekt oprogramowania. Został wygenerowany moduł startowy zawierający deklaracje procedur obsługi wyjątków oraz procedurę inicjującą działanie mikrokontrolera. Środowisko ustawiło również ścieżki dla plików nagłówkowych, dzięki czemu będziemy mogli włączać je do naszych modułów pisanych w języku C.
Rozwijamy foldery w panelu widoku plików z lewej strony okna i otwieramy moduł startowy. W środowisku Keil jest on napisany w języku asemblera ARM, pomimo że nie ma przeciwwskazań, aby był on napisany w C. W module możemy zauważyć deklaracje nazw procedur obsługi wyjątków oraz słabe definicje tych procedur. Dzięki temu mamy zapewnioną domyślną obsługę niespodziewanych wyjątków w postaci pętli nieskończonych, a jednocześnie mamy możliwość stworzenia własnych procedur, które przysłonią procedury domyślne.
Fragment kodu rozpoczynający się etykietą ResetHandler jest procedurą inicjującą działanie mikrokontrolera, uruchamianą po zainicjowaniu go, np. przez włączenie zasilania lub podanie sygnału RESET. Procedura ta w środowisku Keil składa się jedynie z wywołań dwóch procedur: SystemInit i main. Procedura SystemInit służy do wczesnego zainicjowania mikrokontrolera; zwykle zawiera ona programowanie generatora przebiegu zegarowego oraz konfigurację parametrów dostępu do pamięci. Procedura main jest zawarta w bibliotece dostarczanej wraz ze środowiskiem. Przygotowuje ona środowisko pracy dla programów napisanych w C, a następnie wywołuje procedurę main. Procedury SystemInit i main muszą zostać dostarczone przez programistę. Można również skorzystać z modułu z procedurą SystemInit dostarczonego przez producenta mikrokontrolera.
Konfiguracja projektu
Przed rozpoczęciem pisania programu warto ustawić podstawowe parametry konfiguracji projektu. W przypadku prostych projektów możemy wszystkie pliki źródłowe przechowywać w głównym folderze projektu. Nie ma jednak sensu zaśmiecać tego foldera plikami roboczymi, postaciami pośrednimi i innymi plikami tworzonymi podczas kompilacji i konsolidacji, dlatego warto na wstępie zmienić kilka opcji ustawień projektu.
Zaczynamy od zmiany domyślnej nazwy nazwy generowanej wersji projektu z domyślnej Target 1 na nazwę projektu – w naszym przypadku Empty. Możemy to zrobić klikając powoli dwukrotnie na nazwie Target 1 w panelu z lewej strony okna i wpisując nową nazwę.
Następnie klikamy prawym przyciskiem myszy na folderze Empty i z menu kontekstowego wybieramy pierwszą opcję – Options for target 'Empty’. Mamy tu do wykonania kilka zmian:
- W zakładce Output wybieramy Select Folder for Objects, w otwartym dialogu tworzymy folder o nazwie Obj i wybieramy go jako miejsce składowania plików pośrednich.
- W zakładce Listing wybieramy Select Folder for Listings, w otwartym dialogu tworzymy folder o nazwie Lst i wybieramy go jako miejsce składowania plików raportów.
- W zakładce C/C++ wybieramy poziom optymalizacji kodu 2.
Tworzenie programu
Wybieramy opcję File-New i piszemy nasz pierwszy, niemal pusty program w języku C. Program zawiera dyrektywę preprocesora włączającą plik nagłówkowy z definicją zasobów mikrokontrolera (która w pustym programie jest całkowicie zbędna) oraz dwie puste procedury – SystemInit i main.
/*
STM32F0DISCOVERY
empty program project
gbm, 12'2012
*/
#include "stm32f0xx.h"
//========================================================================
void SystemInit(void)
{
}
//========================================================================
int main(void)
{
}
Po napisaniu programu zapamiętujemy go w folderze projektu pod nazwą main.c, a następnie dodajemy plik programu do projektu korzystając z menu kontekstowego foldera Source Group 1 – opcja Add Files to Source Group 1.
Gotowy projekt przygotowany według powyższego opisu można znaleźć w folderze Empty, powstałym po rozpakowaniu pliku F0Tutorial.zip.
Następnie z paska narzędzi wybieramy Build, co spowoduje skompilowanie i konsolidację projektu. Raport z tych czynności możemy zaobserwować w dolnym panelu okna. Po usunięciu przyczyn ewentualnych błędów i ostrzeżeń sprawdzamy rozmiar wygenerowanego obrazu raportowany przez konsolidator w dolnym panelu okna. Nasz pusty program zajmuje po kilkaset bajtów kodu i stałych danych. Stałe (sekcja RO-data) – zawiera tablicę adresów procedur obsługi wyjątków zawarta w module startowym oraz dane o pozostałych sekcjach, z których korzysta procedura main podczas inicjowania pamięci RAM. W przypadku procesora Cortex-M0 tablica wyjątków zajmuje 192 bajty. W sekcji stałych są również zapisane początkowe wartości danych statycznych inicjowanych wartościami różnymi od zera, o ile takie dane wstępują w programie. Większość sekcji kodu zajmuje procedura main i inne procedury pochodzące z biblioteki kompilatora. Procedury ResetHandler, SystemInit i main zajmują łącznie zaledwie kilkadziesiąt bajtów.
Dwie pierwsze sekcje (Code i RO-data) zajmują pamięć Flash mikrokontrolera. Pozostałe dwie sekcje – dane statyczne o niezerowych wartościach początkowych (RW-data) oraz pozostałe dane statyczne wraz ze stosem i stertą (sekcja ZI-data) zajmują jedynie pamięć RAM.
Sekcja danych statycznych jest pusta, gdyż nasz program nie definiuje żadnych danych. Ostatnia sekcja oprócz stosu (domyślnie 1024 B) i sterty (domyślnie 512 B) zawiera również obszar roboczy dla biblioteki (96 B). Łączny rozmiar tej sekcji przekracza 1.5 KiB, może on jednak zostać zmieniony poprzez konfigurację modułu startowego.
Przykłady dla płytki STM32F0DISCOVERY bez dodatkowych układów
Pierwszy program, który coś robi
Kolejny program będzie tradycyjnym pierwszym programem dla nowego mikrokontrolera – będzie on naprzemiennie zaświecał i gasił dwie diody świecące dostępne na płytce STM32F0DISCOVERY. Gotowy program znajduje się w projekcie blink0.
Tworzenie programu
Tworzymy projekt i plik programu w taki sam sposób, jak w poprzednik przykładzie, pamiętając o zmianie domyślnych nazw oraz konfiguracji opcji projektu. W pliku programu przed funkcjami umieszczamy definicje połączeń LED i przycisku, określające nazwy portów i pozycje linii portów, do których są podłączone te elementy na płytce DISCOVERY. Są to linie 8 i 9 portu GPIOC.
Po zainicjowaniu mikrokontroler pracuje z wewnętrznym generatorem przebiegu zegarowego o częstotliwości 8 MHz. Ponieważ nie ma powodu, by zmieniać źródło przebiegu ani jego częstotliwość na potrzeby pierwszych, prostych prigramów, funkcja SystemInit() może pozostać pusta. Napiszemy natomiast funkcję main(), która będzie cyklicznie zaświecała i gasiła diody. Wewnątrz funkcji deklarujemy zmienną, która posłuży do realizacji programowej pętli opóźnienia. Zmienna ma typ uint32_t – jest to 32-bitowa zmienna całkowita bez znaku. Użycie typów o jawnie określonych rozmiarach, zdefiniowanych w pliku nagłówkowym stdint.h (włączanym pośrednio przez plik stm32f0xx.h), podnosi czytelność i przenośność programu, dlatego będziemy ich używali w kolejnych przykładach.
W celu przygotowania portu do pracy wykonujemy kolejno następujące czynności:
- włączamy moduł GPIOC poprzez ustawienie bitu w rejestrze AHBENR,
- ustawiamy linie portu GPIOC odpowiadające LED jako wyjścia,
- zaświecamy jedną z diod.
Po zainicjowaniu portu program wchodzi w pętlę nieskończoną, w której następują dwie akcje:
- opóźnienie zrealizowane jako prosta pętla programowa,
- zmiana stanu obu wyjść sterujących diodami poprzez zanegowanie bitów portu, które im odpowiadają.
W ten sposób co określony czas dioda dotychczas świecąca zgaśnie, a ta, która była wygaszona – zaświeci się. Gotowy tekst programu jest przedstawiony poniżej.
Programiści znający mikrokontrolery 8-bitowe mogą zauważyć, że zaprezentowany program różni się od analogicznych programów dla układów 8-bitowych jednym istotnym szczegółem – włączeniem portu GPIOC przed jego konfiguracją. To typowa cecha wszystkich peryferiali w mikrokontrolerach z rdzeniami Cortex-M – przed użyciem modułu należy go uaktywnić. Jest to również najczęstsze źródło błędów w programach pisanych przez początkujących. Jeżeli programista nie włączy modułu, odwołania do niego nie będą miały żadnych skutków albo będą powodowały błędy podczas wykonania programu.
Mikrokontrolery z rdzeniami Cortex-M mają zwykle wiele modułów peryferyjnych, a każdy z nich jest widoczny dla oprogramowania w postaci wielu rejestrów sterujących. Pliki nagłówkowe dostarczane przez producentów mikrokontrolerów najczęściej definiują moduły peryferyjne jako struktury języka C, a poszczególne rejestry modułów – jako pola tych struktur. Przy odwołaniach do rejestrów używamy adresu modułu zdefiniowanego jako stałej typu wskaźnikowego, wskazującej strukturę zawierającą rejestry danego modułu, operatora -> i nazwy rejestru.
Plik nagłówkowy stm32f0xx.h definiuje zarówno nazwy rejestrów jak i nazwy pól (w tym pojedynczych bitów) tych rejestrów. Brakuje w nim jednak definicji symboli odpowiadających możliwym wartościom pól o szerokości powyżej jednego bitu, dlatego potrzebne w programie wartości pól bitowych będziemy definiować jako własne symbole preprocesora. W praktyce warto byłoby stworzyć własny plik nagłówkowy zawierający takie definicje, z którego można będzie korzystać w wielu projektach, jednak w pierwszych projektach będziemy umieszczać te definicje w głównym pliku programu, dla zwiększenia czytelności kodu.
Aby zrozumieć znaczenie poszczególnych instrukcji programu należy zajrzeć do dokumentacji mikrokontrolera. Rejestr AHBENR w module RCC służy do włączania niektórych peryferiali, w tym portów GPIO. Każdy port GPIO zawiera wiele rejestrów sterujących. W naszym przykładzie użyliśmy dwóch z nich: MODER i ODR. Rejestr MODER służy do ustawiania trybu pracy linii portu. Każdej z 16 linii portu odpowiadają dwa kolejne bity rejestru MODER, a ustawienie tych bitów na wartość binarną 01 powoduje zaprogramowanie linii portu jako wyjścia. Nasz program zawiera definicję tej wartości pod nazwą GPIO_MODER_OUT. Przy zapisie do rejestru MODER wartość ta musi być przesunięta w lewo o liczbę pozycji równą podwojonemu numerowi bitu portu.
Rejestr ODR zawiera wartości wyjść. Ponieważ diody są włączone pomiędzy wyjścia mikrokontrolera i masę, ich zaświecenie wymaga wysterowania wyjścia w stan wysoki. Operacja różnicy symetrycznej wykonywana w pętli głównej powoduje zanegowanie stanu obu wyjść sterujących diodami i – w konsekwencji – zmianę stanu obu diod.
/*
STM32F0DISCOVERY
Trivial blinker - very first project
gbm, 12'2012
*/
#include "stm32f0xx.h"
//========================================================================
// defs for STM32F05x chips
#define GPIO_MODER_OUT 1
//========================================================================
// defs for STM32F0DISCOVERY board
#define LED_PORT GPIOC
#define BLUE_LED_BIT 8
#define GREEN_LED_BIT 9
//========================================================================
void SystemInit(void)
{
}
//========================================================================
int main(void)
{
uint32_t i;
// port setup
RCC->AHBENR = RCC_AHBENR_GPIOCEN; // turn on GPIOC
LED_PORT->MODER = GPIO_MODER_OUT <<(GREEN_LED_BIT <<1)
| GPIO_MODER_OUT <<(BLUE_LED_BIT <<1); // LED pins as outputs LED_PORT->>ODR = 1 <<GREEN_LED_BIT; // green initially ON
for (;;)
{
for (i = 0; i < 1000000; i ++); // quick-and-dirty delay // toggle both LEDs LED_PORT->ODR ^= 1 <
 Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji  Czy kamery termowizyjne pokazują nam całą prawdę?
Czy kamery termowizyjne pokazują nam całą prawdę?  Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000
Generowanie ujemnego napięcia odniesienia – eksperymenty z zestawem ADALM2000 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



