





[RAQ] Przypadek błądzącego żyroskopu (Inertial Measurement Unit)
Pytanie:
Słyszałem, że wskazanie żyroskopu może akumulować błąd dryftu przez długi czas. Czy to może zdarzyć się w przypadku mojego IMU?
Odpowiedź:
Żyroskop typu MEMS, który mierzy prędkość kątową, ma kilka wewnętrznych przyczyn powodujących powstanie błędu. Jedną ze składowych błędu jest niestabilność odchylenia. Jednak układ typu IMU (inercyjna jednostka pomiarowa) ma w porównaniu do komponentu dyskretnego kilka zalet, które pozwalają uzyskać lepsze parametry. IMU z sześcioma stopniami swobody składa się z kilku inercyjnych czujników MEMS z kompensacją temperaturową, które zostały skalibrowane tak, aby zapewnić zgodność z ortogonalnymi osiami współrzędnych. Wewnętrzny trój- osiowy żyroskop mierzy obrót względem znanego punktu, natomiast trójosiowy akcelerometr mierzy przemieszczenie. W kolejnym kroku następuje przetwarzanie z wykorzystaniem procesora sygnałowego lub mikrokontrolera, zespolonego wewnętrznie, pozwalającego uzyskać łączny odczyt z obu tych czujników.
Żyroskopy są podatne na niestabilność odchylenia – w którym początkowy odczyt zerowy na żyroskopie będzie dryfował w czasie na skutek sumowania wrodzonych niedoskonałości i szumów występujących w urządzeniu. Powtarzalność odchylenia można skalibrować w znanym nam zakresie temperatur pracy IMU. Jednak sumowanie się stałego niezrównoważenia spowoduje błąd określenia kąta. Błędy te będą się akumulować jako, że żyroskop, w wyniku szacowanego dryftu rotacji lub kąta, dryfował w dłuższym okresie czasu. Niepożądanym skutkiem dryftu jest ciągły błąd obliczonego kursu. Natomiast akcelerometry zachowują się inaczej – są wrażliwe na wibracje i inne przyspieszenia niezwiązane z grawitacją.
Dryft żyroskopu wynika głównie z połączenia dwóch składowych: wolnozmiennej (niemal stałej), zwanej niestabilnością odchylenia oraz szumu na wyższych częstotliwościach, zwanego losowym błędem kątowym (angular random walk – ARW), inaczej białym szumem w ruchu obrotowym. Te parametry są mierzone w stopniach obrotu na jednostkę czasu. Oś Z (Yaw) jest najbardziej narażona na dryft tego typu. Natomiast duża część dryftu w osiach Y (przechylenia) i X (obrotu), może zostać usunięta w IMU za pomocą sprzężenia zwrotnego do monitorowania pozycji względem. punktu środka ciężkości (punktu wspólnego osi X, Y i Z). Filtrowanie wyjścia żyroskopowego, realizowane w IMU za pomocą filtru dolnoprzepustowego lub filtru Kalmana, jest również powszechnie stosowaną metodą usunięcia części błędu wynikającego z dryftu.
W idealnym przypadku, aby skorygować dryft żyroskopu dla wszystkich osi, niezbędne są dwie referencje. Układ IMU z 9-cioma stopniami swobody zazwyczaj zawiera dodatkowe czujniki w postaci magnetometrów odpowiadających za każdą z trzech osi. Magnetometr mierzy natężenie pola odniesione do północnego bieguna magnetycznego Ziemi. Czujniki te można wykorzystać razem z danymi z akcelerometru jako dodatkowe źródło referencyjne, aby zniwelować skutki dryftu żyroskopu wzdłuż osi Z. Jednak zaprojektowanie odpowiednich magnetometrów przestrzennych może być trudniejszym rozwiązaniem niż akcelerometru, ponieważ istnieje wiele źródeł generujących pola magnetyczne o amplitudzie zbliżonej do pola ziemskiego.
Jedną z najskuteczniejszych metod eliminacji długoterminowego dryftu jest aktualizacja zerowej prędkości kątowej żyroskopu. Jeżeli skądinąd wiadomo, że urządzenie jest w danym momencie nieruchome, odchylenie żyroskopu w danej osi można wyzerować. Występowanie takiej okoliczności może się znacząco różnić w zależności od aplikacji. Jednak w każdej sytuacji, gdy system znajduje się w powtarzalnym stanie spoczynku, można wyzerować jego wskazania. Typowe sytuacje tego typu to np. zatrzymany samochód, stacjonarny autonomiczny robot, lub moment między krokami idącego człowieka.
Oczywiście zastosowanie wysokiej klasy IMU, który zapewnia minimalną niestabilność niezrównoważenia w danym projekcie, już na starcie może dać najbardziej bezpośredni wpływ na dryft żyroskopu. Stały błąd niezrównoważenia żyroskopu można zmierzyć, uśredniając wartość na wyjściu w długim odcinku czasu, podczas którego urządzenie się nie obraca. Wykres wariancji Allana układu IMU pokazuje dryft żyroskopu w stopniach na godzinę w funkcji czasu integracji Tau. Zazwyczaj przedstawia się go w skali logarytmicznej.
Układ ADIS16490 to najnowszy produkt w ofercie ADI obejmującej wysokiej klasy układy IMU o wyśrubowanych parametrach. Niestabilność odchylenia początkowego ADIS16490 wynosi tylko 1,8 stopnia na godzinę. Znajduje to odzwierciedlenie w wykresie wariancji Allana układu ADIS16490 przedstawionym na rysunku 1, na którym błąd 1,8 stopnia odpowiada okresowi godziny (3600 sekund).
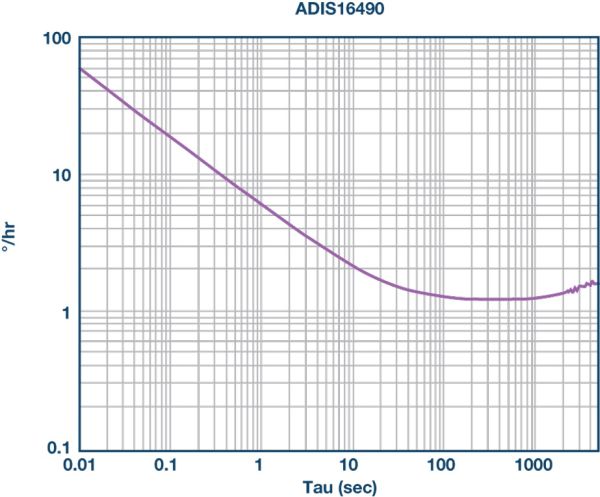
Rysunek 1. Wykres wariancji Allana układu ADIS16490
 Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?
Grzegorz Kamiński: Dlaczego powstały tranzystory FinFET i GAAFET?  Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii
Google stawia na fuzję jądrową. AI potrzebuje coraz więcej energii  Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji
Fotowoltaika perowskitowa: od wydajności laboratoryjnej do masowej komercjalizacji 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



