





[PROJEKT] Prosty robot z czujnikiem odległości Sharp GP2Y0D810Z0F

W projekcie zrealizowany jest prosty robot mobilny. Jest on oparty na płytce rozwojowej KA-Nucleo–F411CE z mikrokontrolerem SMT32. Wykorzystuje również czujnik odległości, aby uniknąć zderzenia z przeszkodą.
Do zrealizowania projektu potrzebne są:
- KA-NUCLEO-F411CE
- Dwukanałowy sterownik silników (mostek H) z L298 dla Arduino
- Podwozie 2WD Robot Car
- Cyfrowy czujnik odległości 10 cm (GP2Y0D810Z0F)
- Przewody żeńsko-męskie
- Źródło zasilana np. akumulator Li-pol 7,4 V
Podstawę dla naszego robota stanowi podwozie 2WD Robot Car. To zestaw do samodzielnego montażu, który zawiera elementy konstrukcyjne wykonane z przezroczystej plexi, dwa silniki prądu stałego z kołami o średnicy 65 mm, dwa kółka podporowe oraz koszyk na 2 baterie AA. W zestawie znalazły się również odpowiednie śrubki oraz dystanse potrzebne do złożenia podwozia. Po złożeniu podwozie 2WD Robot Car prezentuje się następująco:
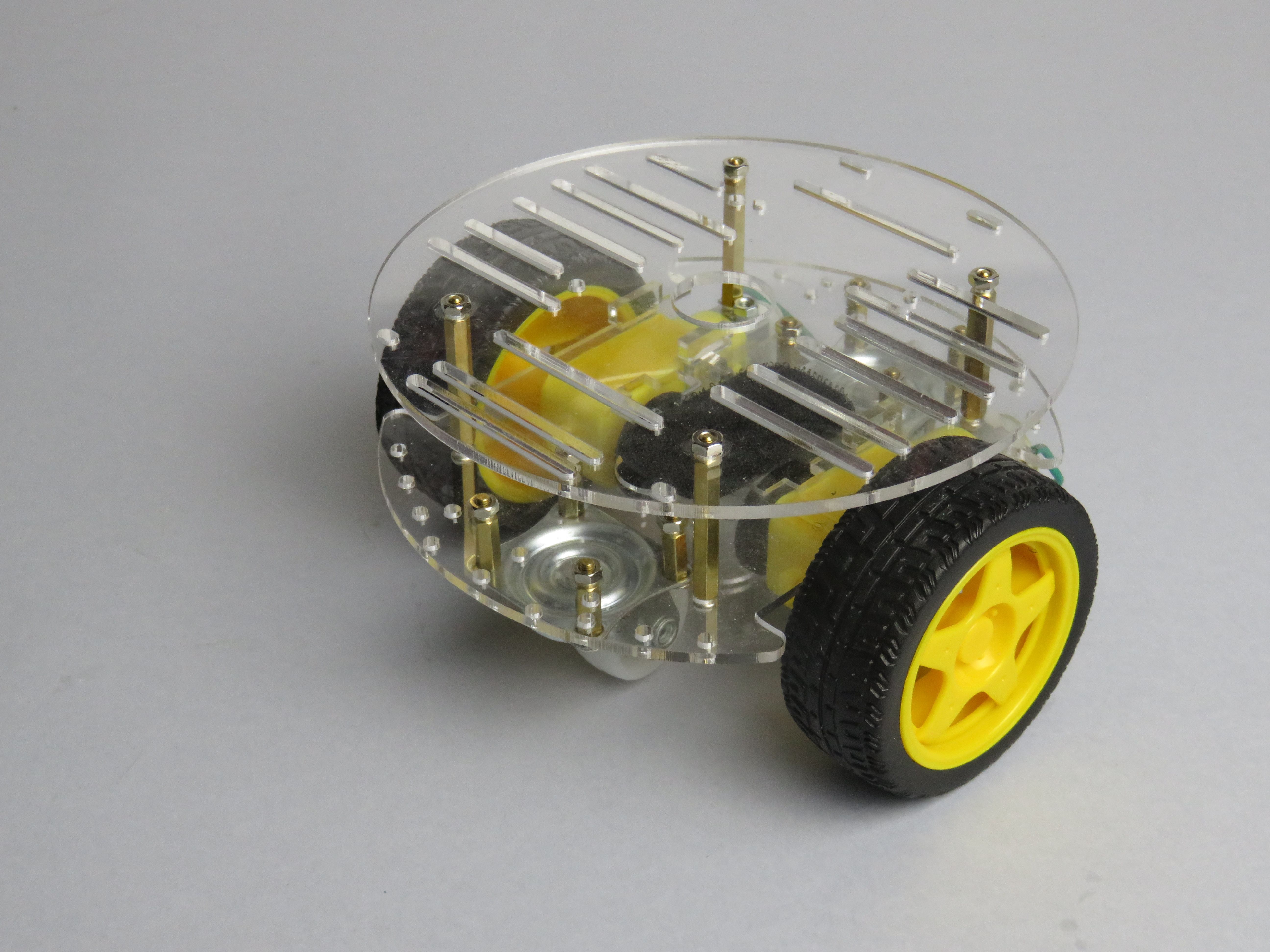
Rysunek 1. Złożone podwozie 2WD Robot Car
Górny element podwozia posiada liczne otwory, które ułatwiają montaż różnych elementów. Na szczycie podwozia znajduje się płytka KA-Nucleo-F411CE. Akumulator Li-Pol umieszczony jest niżej. Po montażu elementów robot prezentuje się następująco:
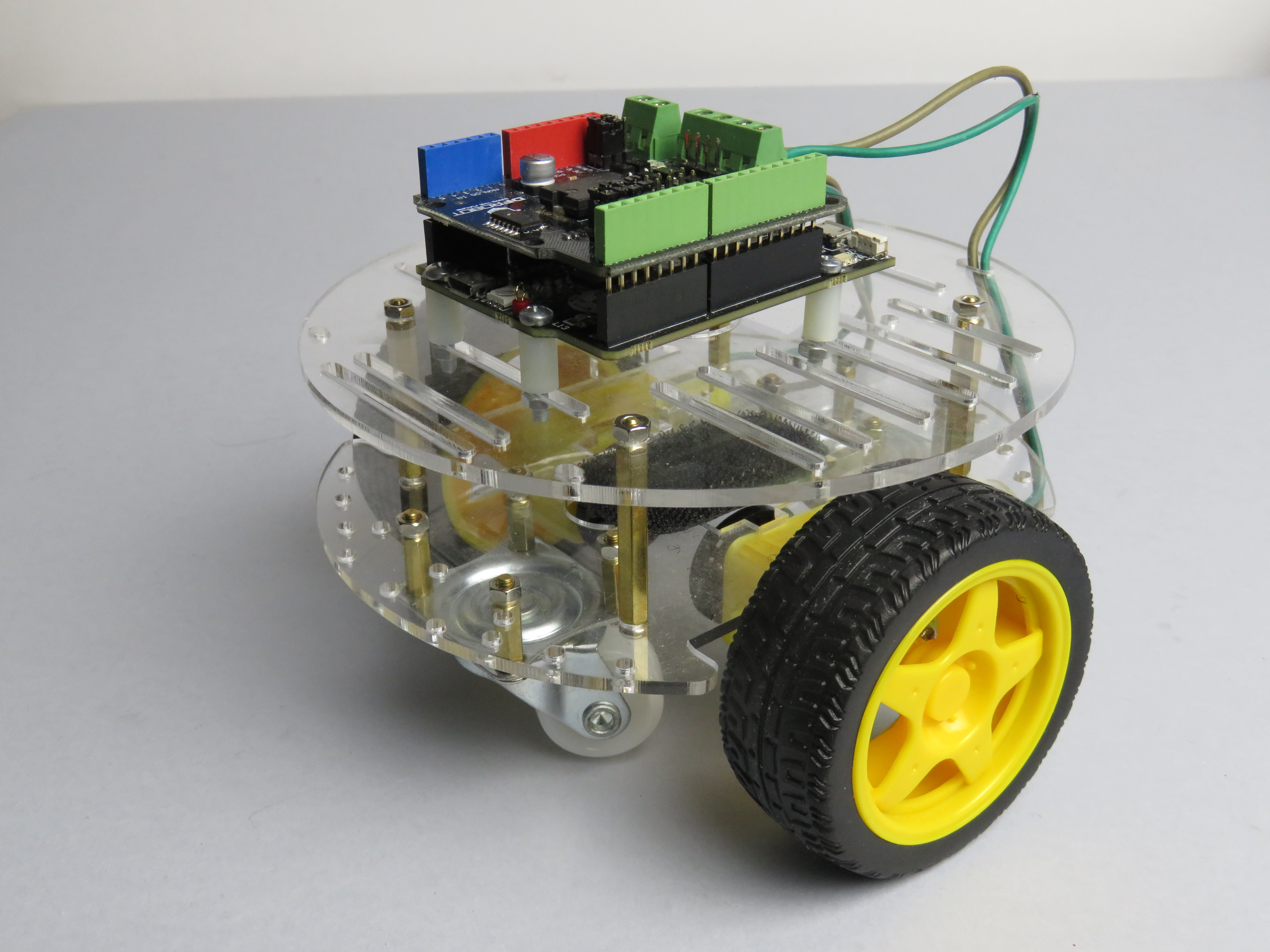
Rysunek 2. Podwozie z zamontowaną płytką KA-Nucleo-F411CE i sterownikiem silników
Ostatnim elementem jest cyfrowy czujnik odległości Sharp (GP2Y0D810Z0F), który pozwala wykrywać przeszkody w odległości 2…10 cm. Czujnik ma wyjście cyfrowe. Domyślnie na jego wyjściu jest stan wysoki, jednak gdy przed czujnikiem pojawi się jakiś obiekt, na wyjściu pojawia się stan niski. Sensor wykorzystuje światło podczerwone do wykrywania obiektów. Do podwozia przymocowany jest za pomocą mocowania wydrukowanego na drukarce 3D (plik znajduje się w sekcji „do pobrania”), można go również zamocować w inny sposób, np. wykorzystując dwustronną taśmę klejącą. Czujnik jest zamontowany z przodu podwozia jak na rysunku 3.
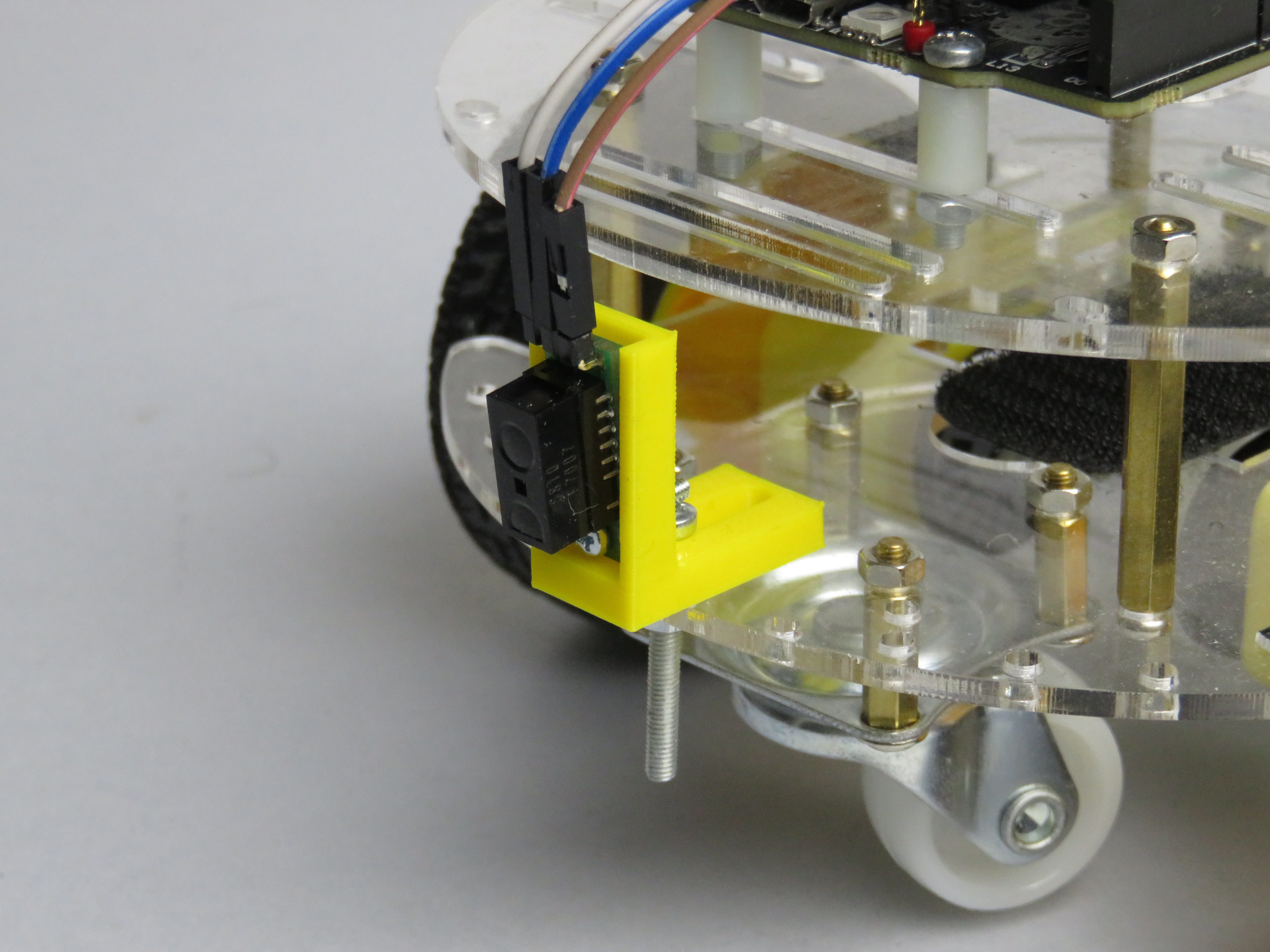
Rysunek 3. Czujnik odległości zamontowany na podwoziu
Gdy wszystkie elementy znajdują już się na podwoziu, musimy podłączyć czujnik odległości do KA-Nucleo-F411CE zgodnie z tabelą poniżej:
| Pin KA-Nucleo | Czujnik odległości |
| 5V | 5V |
| GND | GND |
| D2 | OUT |
Po podłączeniu czujnika odległości całość prezentuje się następująco:
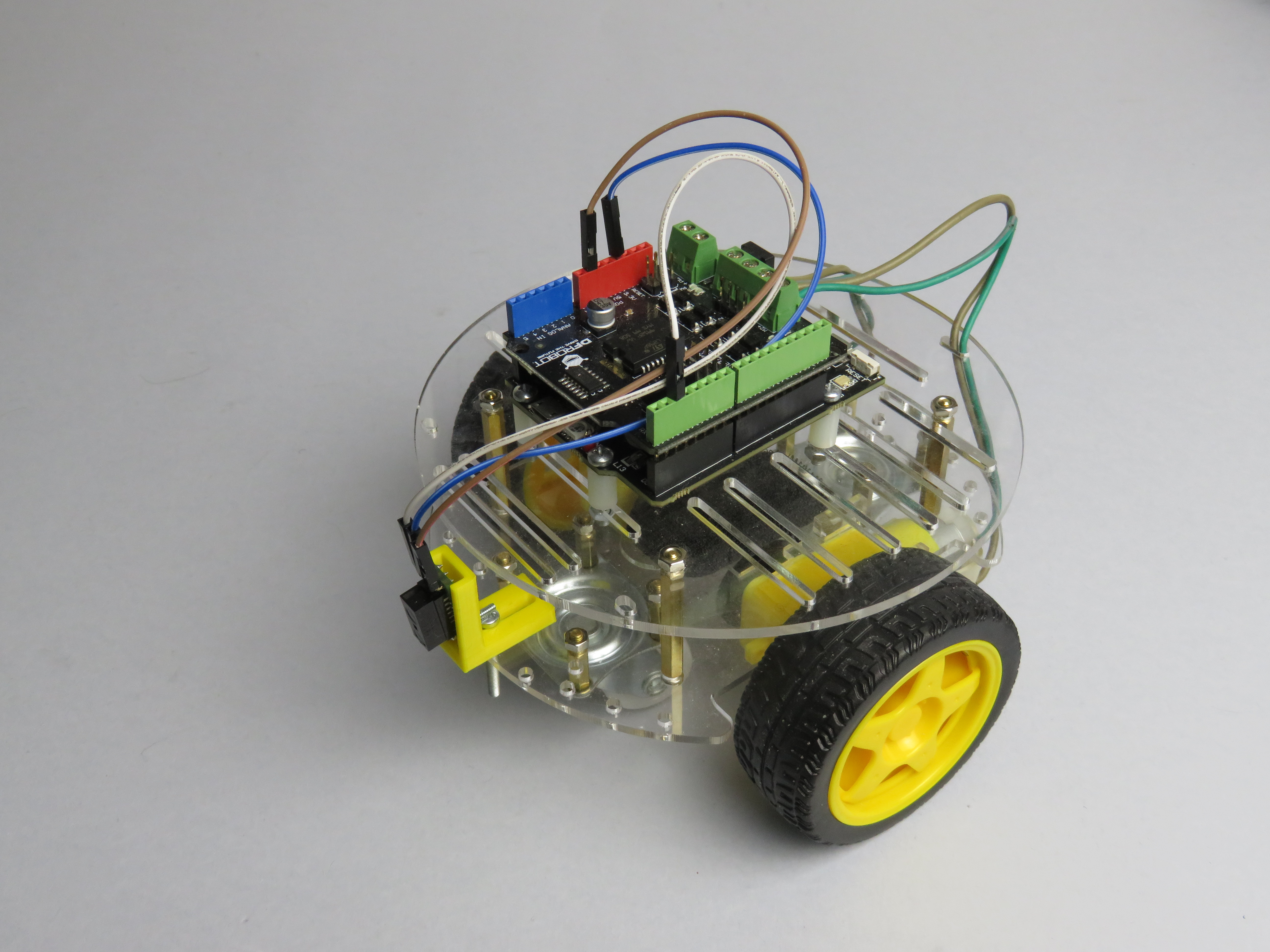
Rysunek 4. Gotowa konstrukcja „robota”
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






