





[PRZYKŁAD] Sterowanie serwomechanizmem za pomocą joysticka oraz KA-NUCLEO-F411CE
Po zmontowaniu sprzętu można przejść do części programowej. Pierwszym etapem jest konfiguracja mikrokontrolera STM32 za pomocą programu STM32CubeMX
Szczegółowy opis narzędzia CubeMX znajduje się w artykule:
STM32Cube graficzny konfigurator STM32
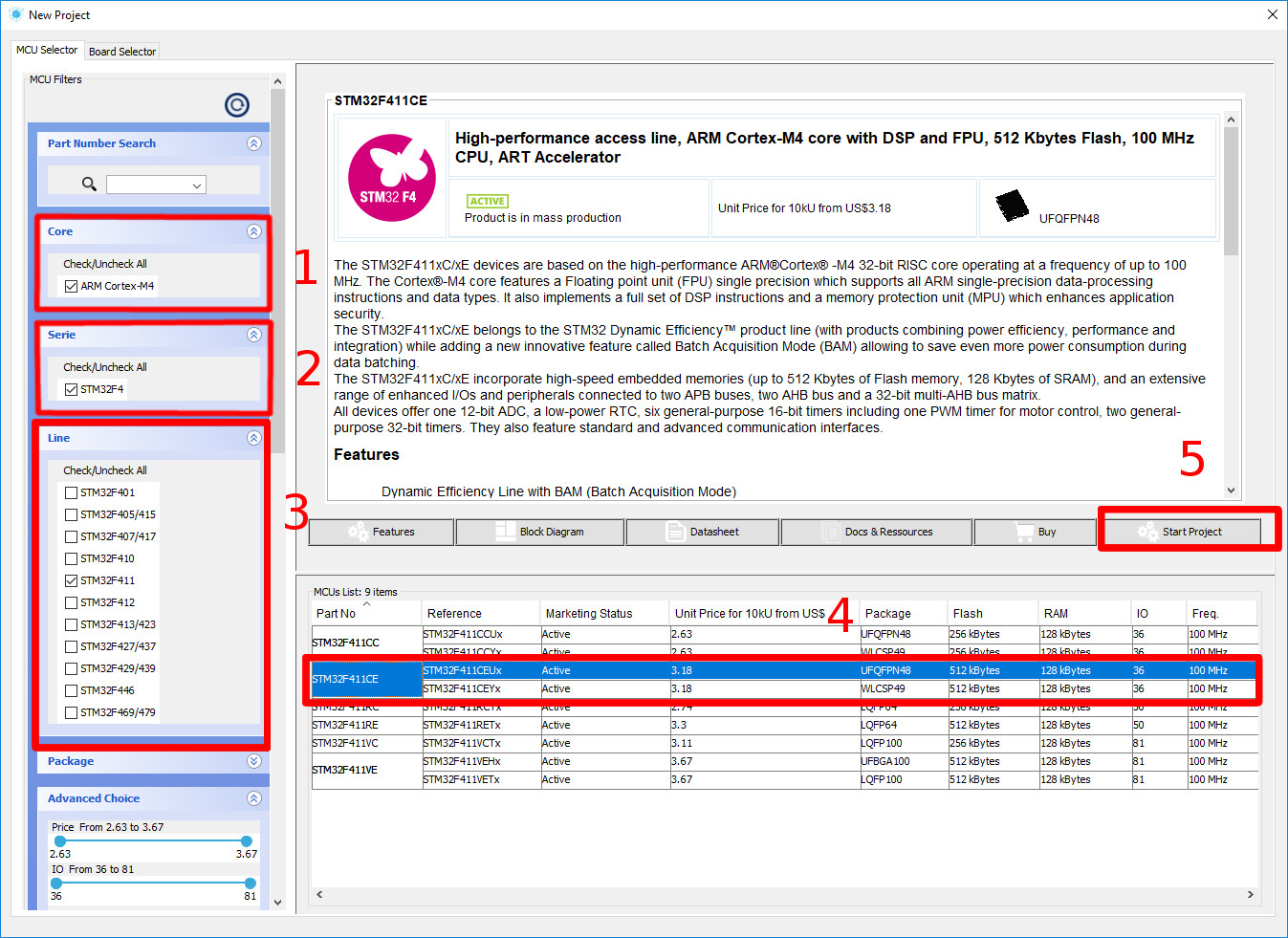
Po uruchomieniu narzędzia i wybraniu nowego projektu należy określić, z jakim procesorem będziemy mieć do czynienia. W poszukiwaniach można sobie pomóc wybierając odpowiedni rdzeń (1), serię (2) oraz linię procesora (3) na pasku bocznym. W naszym przypadku jest to model STM32F411CEUx (4). Wybór zatwierdza się przyciskiem Start Project (5).
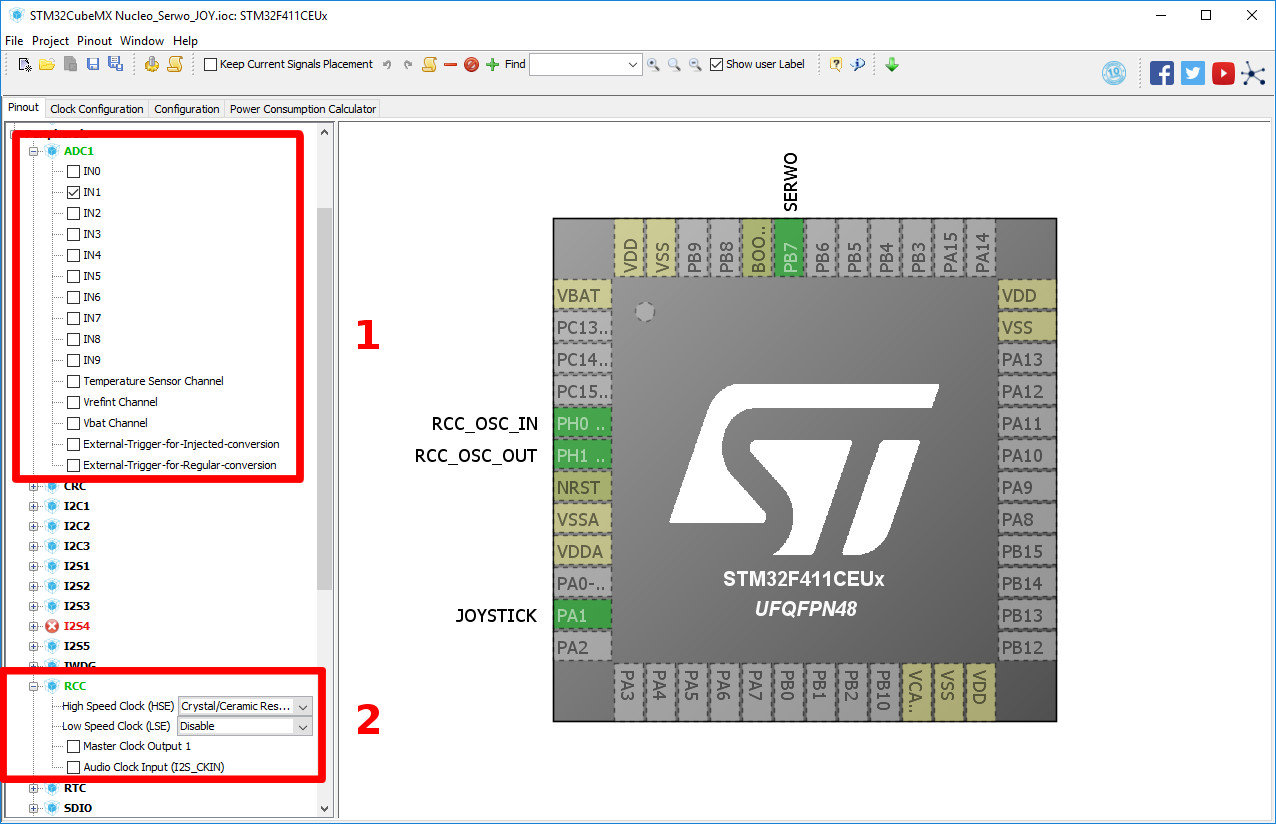
Po utworzeniu projektu trzeba skonfigurować źródło taktowania procesora i magistrali peryferiów. W tym celu, po rozwinięciu listy RCC, przy ustawieniu High Speed Clock (HSE) należy wybrać Crystal/Ceramic Resonator (1). Następnie można ustawić rolę odpowiednich pinów mikrokontrolera. Dla Joysticka będzie to pin analogowy A1. W tym celu, po rozwinięciu listy ADC1, zaznaczamy opcję IN1 (2). Po tych operacjach piny PH0, PH1 i PA1 powinny zmienić kolor na zielono. Ostatni z nich odpowiada pinowi A1 na płytce.
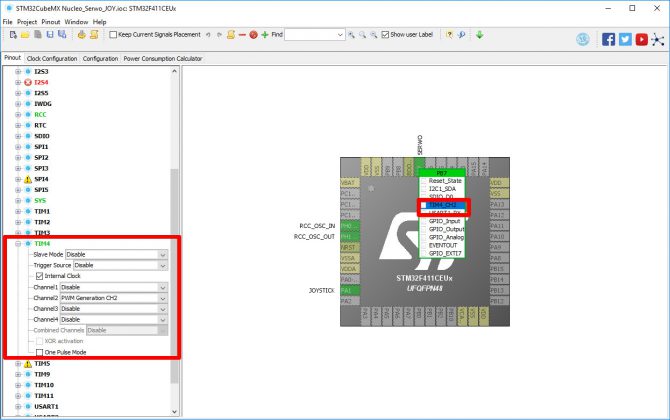
Teraz należy ustawić rolę pinu D9 jako wyjścia PWM. W tym celu trzeba kliknąć na pin PB7 i wybrać opcję TIM4_CH2. Na panelu bocznym, po rozwinięciu listy TIM4, powinno się oznaczyć opcję Internal Clock a z listy Channel 2 wybrać PWM Generation CH2.
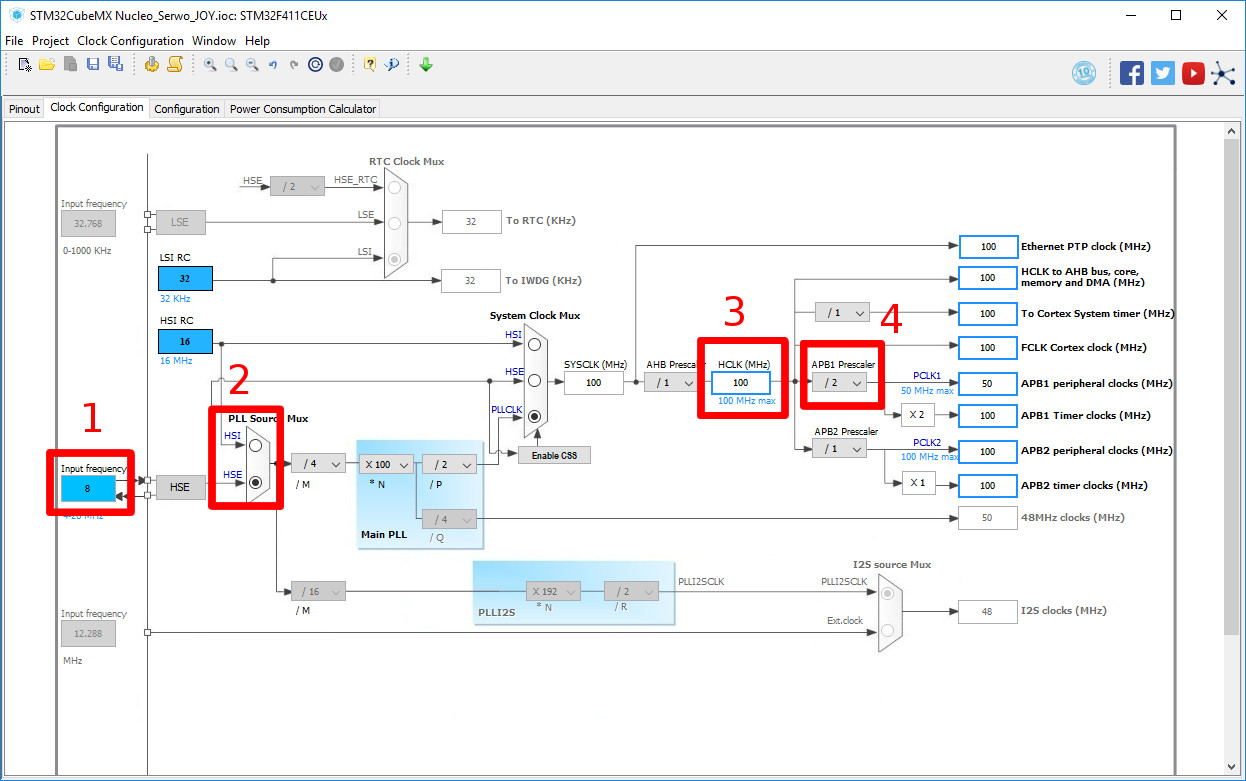
Zakładka Clock Configuration służy do konfiguracji częstotliwości taktowania wewnątrz procesora. Parametr Input Frequency należy ustawić na wartość 8 MHz (1). Źródłem sygnału pętli PLL powinien być sygnał z oscylatora, a więc HSE (2). Częstotliwość zegara HCLK trzeba ustawić na 100 MHZ (3). Prescaler magistrali ABP1 powinno się ustawić na /2 (4).
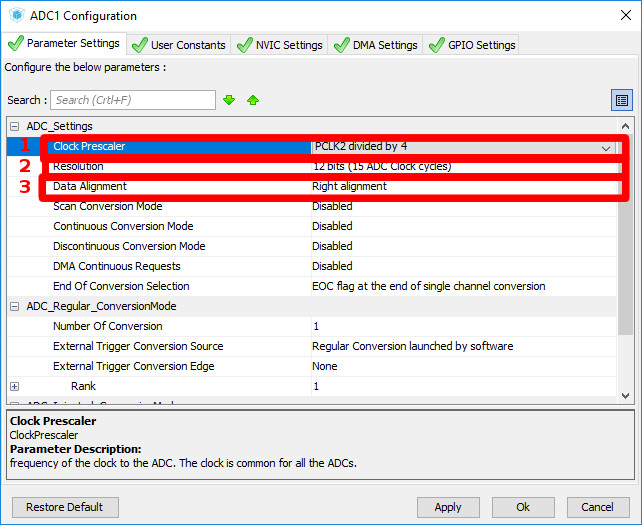
W tym momencie należy przejść do zakładki Configuration. Po naciśnięciu przycisku ADC1 można ustawić konfigurację przetwornika Analogowo-Cyfrowego. Aby uzyskać najlepszą dokładność i dobrą szybkość przetwarzania powinno się ustawić opcje: Clock prescaler na PCLK2 divided by 4 (1) i Resolution na 12 bits (15 ADC Clock cycles). Resztę opcji można pozostawić domyślnie, jednak należy sprawdzić czy opcja Data Alignment jest ustawiona w stan Right aligment (To ustawienie powoduje naturalne rozłożenie bitów w zwracanej próbce t.j. najmłodszy bit jest po prawej stronie) (3).
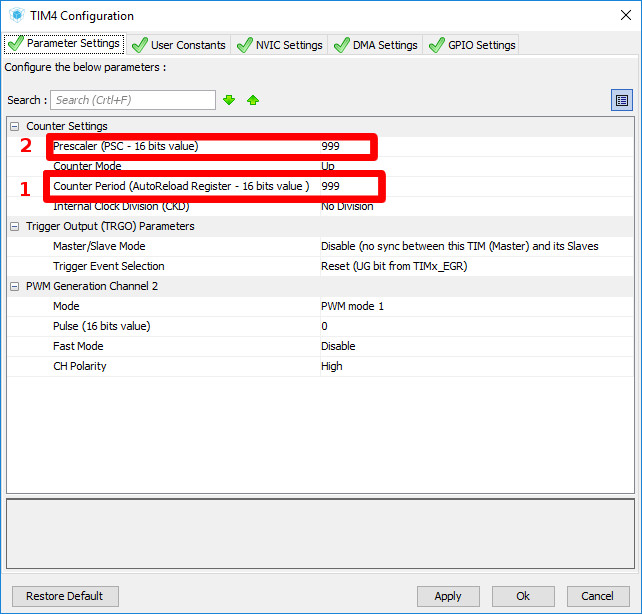
W zakładce TIM4 można ustawić parametry sygnału PWM. Sygnał ten powinien mieć częstotliwość 50 Hz i dokładność ustawianego wypełnienia 0,1% (Przy takich parametrach serwomechanizmu daje to rozdzielczość ustawianego kąta ok. 1°). Dokładność można ustawić wpisując wartość do rejestru Counter Period. Wpisujemy tam ilość stopni swobody minus 1, co daje nam wartość 999 (1). Wartość prescalera obliczamy z wzoru:
PSC = (TIM_CLK/((ARR+1)*FREQ)) – 1
Gdzie:
- TIM_CLK – zegar magistrali, w tym przypadku 50 MHz
- ARR – wartość rejestru Counter Period, w tym przypadku 999
- FREQ – wymagana częstotliwość sygnału PWM, w tym przypadku 50 Hz
Obliczona wartość wpisujemy do konfiguratora (2):
PSC = (50000000/((999+1)*50)) – 1 = 999
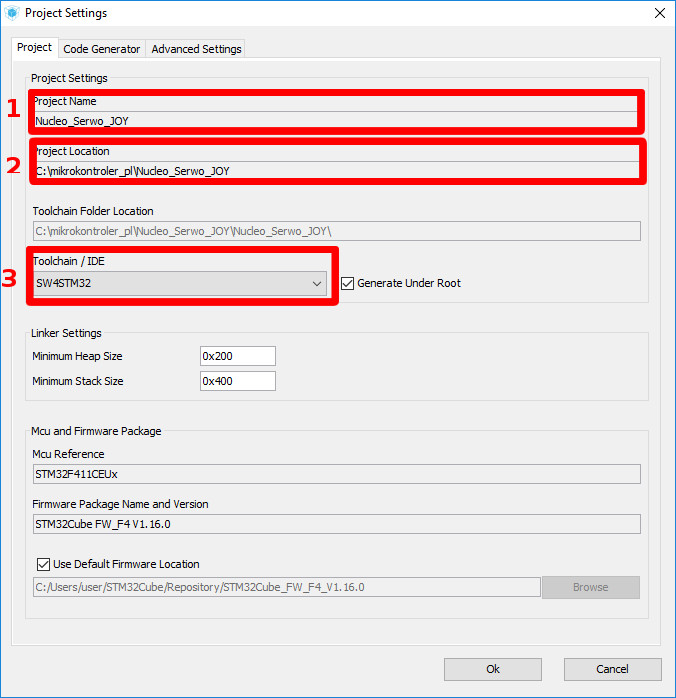
Po wpisaniu nazwy projektu (1), folderu(2) oraz wyborze środowiska (3) w zakładce Project > Settings, należy wygenerować kod za pomocą opcji Project > Generate Code. W przykładzie wykorzystywane jest środowisko System Workbench for STM32, które w programie CubeMX obecne jest pod nazwą SW4STM32.
Po wygenerowaniu możemy od razu nacisnąć Open Project, aby przejść do uzupełnienia kodu (Cały projekt znajduje się w sekcji „do pobrania”). Na początku należy zaimportować niezbędną bibliotekę math.
/* USER CODE BEGIN Includes */ #include <math.h> /* USER CODE END Includes */
W następnym kroku powinno się zainicjalizować niezbędne zmienne:
/* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ uint16_t pomiarADC; int przesuniecie; /* USER CODE END PV */
Po wykonaniu wszystkich funkcji inicjalizujących peryferia, należy je włączyć następującymi poleceniami:
/* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_2); HAL_ADC_Start(&hadc1); /* USER CODE END 2 */
W pętli głównej programu z przetwornika ADC pobierana jest próbka danych, a następnie obliczana jest wartość wypełnienia PWM. Wzór wynika z faktu, że maksymalne wychylenie serwa w lewo powinno się osiągnąć dla napięcia na przetworniku 0 V, a w prawo – dla napięcia 3,3 V. Liczba, jaka należy wpisać do rejestru CCR2 jest – dla tych ustawień – stukrotnością długości impulsu w milisekundach. Obliczona wartość znajduje się w zmiennej przesuniecie, której wartość od razu wpisywana jest do rejestru CCR2. Następnie ponownie włączany jest przetwornik ADC, a także wprowadzane jest niewielkie opóźnienie, które jednak nie ma widocznego wpływu na płynność działania.
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
pomiarADC = HAL_ADC_GetValue(&hadc1);
przesuniecie = round(60+pomiarADC*(190.0/4095.0));
TIM4->CCR2 = przesuniecie;
HAL_ADC_Start(&hadc1);
HAL_Delay(1);
}
/* USER CODE END 3 */
Działanie programu zostało przedstawione na poniższym filmie:
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



