





[PROJEKT] Sterowanie urządzeniami dużych mocy – KA-NUCLEO oraz moduł z przekaźnikami
Gdy już wiemy jakie funkcje będą pełniły poszczególne piny można podłączyć moduł przekaźnika do KA-NUCLEO oraz do urządzeń, którymi będziemy sterować. Można zacząć od połączenia z płytką z mikrokontrolerem. Należy to zrobić zgodnie z poniższą tabelką:
| Pin KA-NUCLEO | Pin modułu z przekaźnikami |
| +5V | DC+ |
| GND | DC- |
| D7 | IN1 |
| D8 | IN2 |
Urządzenia, którymi będziemy sterować (przy założeniu że przekaźniki będą załączać urządzenie a nie je rozłączać) należy podłączyć w następujący sposób:
| Pin modułu z przekaźnikami | Pin urządzania do sterowania |
| COM1 | Plus urządzenia 1 |
| NC1 | Plus zasilania 12V |
| COM2 | Plus urządzenia 2 |
| NC2 | Plus zasilania 12V |
Zmontowany układ prezentuje się następująco:
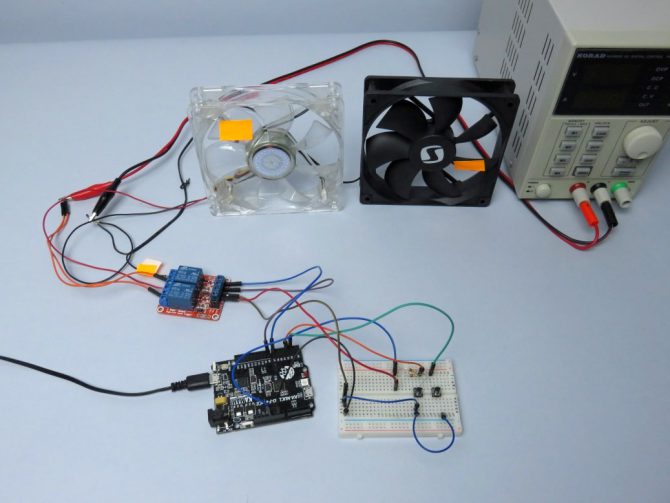
Rys 11. Moduł z przekaźnikami podłączony do KA-NUCLEO
Po zmontowaniu układu można przejść do napisania programu w środowisku AC6. Będzie działał on następująco – gdy przyciśniemy przycisk 1 zostanie załączony przekaźnik 1, natomiast gdy drugi raz przyciśniemy przycisk 1 przekaźnik 1 zostanie rozłączony. Analogicznie będzie odbywało się to w przypadku drugiego przycisku oraz drugiego przekaźnika (projekt dla programu AC 6 z kodem programu wykorzystanym w projekcie znajduje się w sekcji do pobrania na końcu tego artykułu).
Najpierw deklarujemy dwie zmienne stan_przycisk_1 oraz stan_przycisk_2 należy je umieścić w sekcji Private variables:
/* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ uint stan_przycisk_1 = 0; uint stan_przycisk_2 = 0; /* USER CODE END PV */
Następnie w sekcji Private function prototypes znajduje się funkcja do obsługi przerwań:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
if(GPIO_Pin == PRZYCISK_1_Pin)
{
if (stan_przycisk_1 == 0)
{
stan_przycisk_1 = 1;
}
else if (stan_przycisk_1 == 1)
{
stan_przycisk_1=0;
}
}
if(GPIO_Pin == PRZYCISK_2_Pin)
{
if (stan_przycisk_2 == 0)
{
stan_przycisk_2 = 1;
}
else if (stan_przycisk_2 == 1)
{
stan_przycisk_2=0;
}
}
}
Jeżeli wystąpi przerwanie zewnętrzne, najpierw sprawdzane jest od którego pinu pochodzi: PA10 (PRZYCISK_1) czy PB3 (PRZYCISK_2). Następnie ustalana jest wartość zmiennej przypisanej do konkretnego przycisku. Dla przykładu jeżeli wystąpiło przerwanie od pinu PA10, sprawdzana jest wartość zmiennej stan_przycisku_1, i jej wartość zostaje zamieniona na przeciwną (jeżeli jej wartość wynosiła 1 to jest ustawiane 0, jeżeli było 0 jest ustawiane 1). Dla przycisku drugiego kod wygląda analogicznie.
Następnie można przejść do omówienia do pętli głównej programu. W sekcji /* USER CODE BEGIN 3 */ umieszczony jest kod, który sprawdzi zmienną stan_przycisku_1, następnie odczeka 50 ms (ma to przeciwdziałać drganiom styków przycisków i przypadkowym zmianom stanów). Po 50 milisekundach sprawdzany jest stan przycisku 1. Jeżeli jest on wciśnięty (stan niski) na wyjściu wyj_przekaznik_1 ustawiany jest stan niski. Dla drugiego przycisku kod wygląda podobnie z tą różnica, że sprawdzana jest zmienna stan_przycisku_2 oraz załączane jest wyjście wyj_przekaznik_2.
/* USER CODE BEGIN 3 */
// Przekaznik 1
if (stan_przycisk_1 == 1)
{
HAL_Delay(50);
if (HAL_GPIO_ReadPin(GPIOA, PRZYCISK_1_Pin)== GPIO_PIN_RESET)
{
HAL_GPIO_WritePin(GPIOA, WYJ_PRZEKAZNIK_1_Pin, GPIO_PIN_SET);
}
}
else if (stan_przycisk_1 == 0)
{
HAL_Delay(50);
if (HAL_GPIO_ReadPin(GPIOA, PRZYCISK_1_Pin)== GPIO_PIN_SET)
{
HAL_GPIO_WritePin(GPIOA, WYJ_PRZEKAZNIK_1_Pin, GPIO_PIN_RESET);
}
}
// Przekaznik 2
if (stan_przycisk_2 == 1)
{
HAL_Delay(50);
if (HAL_GPIO_ReadPin(GPIOB, PRZYCISK_2_Pin)== GPIO_PIN_RESET)
{
HAL_GPIO_WritePin(GPIOA, WYJ_PRZEKAZNIK_2_Pin, GPIO_PIN_SET);
}
}
else if (stan_przycisk_2 == 0)
{
HAL_Delay(50);
if (HAL_GPIO_ReadPin(GPIOB, PRZYCISK_2_Pin)== GPIO_PIN_SET)
{
HAL_GPIO_WritePin(GPIOA, WYJ_PRZEKAZNIK_2_Pin, GPIO_PIN_RESET);
}
}
}
/* USER CODE END 3 */
Działanie programu zostało przedstawione na poniższym materiale wideo:
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






