





[PRZYKŁAD] Komunikacja w paśmie ISM i KA-NUCLEO-F411CE

Niniejszy artykuł pokazuje przykład sterowania urządzeniami zewnętrznymi za pomocą komunikacji w paśmie ISM. Sygnały z pilota zdalnego sterowania przetwarzane są przez mikrokontroler STM32 zawarty na płytce KA-NUCLEO-F411CE i w ten sposób sterowane są elementy wyjściowe: diody LED oraz Buzzer.
W przykładzie wykorzystano następujące komponenty:
- Pilot bezprzewodowy 4-kanałowy do Arduino (UWAGA! Ze względu na obowiązujące w Polsce przepisy, tory radiowe ISM 315 MHz można używać wyłącznie w celach testowych)
- KA-NUCLEO-F411CE – płytka rozwojowa z mikrokontrolerem STM32F411CE
- Aktywny Buzzer z generatorem KEYES KY-012
- Trzy różnokolorowe diody LED
- Trzy rezystory 270Ω
- Płytka stykowa
- Przewody męsko-żeńskie i męsko-męskie

Moduł pilota bezprzewodowego 4-kanałowego do Arduino składa się z samego pilota z czterema przyciskami oraz modułu odbiornika. Komunikacja odbywa się w paśmie ISM 315 MHz. Zasięg, według producenta, wynosi od 50 do 100 metrów. Trochę mniej techniczną cechą pilota jest ciekawy wygląd. Moduł jest kompatybilny z platformą Arduino. Komunikacja modułu z urządzeniami zewnętrznymi jest prosta: gdy odbiornik odczyta informacje o przyciśnięciu przycisku wprowadza jeden z pinów D0-D3 w stan wysoki. Dodatkowo pin VT wprowadzany jest w stan wysoki, gdy którykolwiek z przycisków na pilocie jest wciśnięty. Poniżej znajduje się tabela opisująca to, który pin odpowiada któremu przyciskowi na pilocie.
| Pin wyjściowy odbiornika | Przycisk na pilocie |
| D0 | B |
| D1 | D |
| D2 | A |
| D3 | C |
Sygnały z pilota zdalnego sterowania są przetwarzane przez mikrokontroler STM32F4 zawarty na płytce KA-NUCLEO-F411CE i w ten sposób sterowane będą elementy wyjściowe: diody LED oraz Buzzer. Jedno naciśniecie przycisku powoduje włączenie elementu, następne – jego wyłączenie. Sterowanie odbywa się za pomocą przerwań – gdy mikrokontroler zauważy zbocze rosnące na linii VT wchodzi w stan obsługi przerwania. W tym ostatnim zmienia stan linii według tego, który przycisk jest włączony. Moduł odbiornika powinien być zasilany napięciem 5 V (przy zasilaniu odbiornika napięciem 3,3 V układ działa, ale zasięg drastycznie spada – do kilku centymetrów). Także poziom wysoki linii D0-D3 oraz VT wynosi 5 V, w związku z tym należy podłączyć odbiornik do tych pinów mikrokontrolera, które tolerują napięcie 5 V. Linie, do których nie należy podłączać napięcia wyższego niż 3,3 V to PA0 (A0), PA4 (A2), PA5(D13), PB5 (D4). Nie należy również podłączać wejść odbiornika do pinu PA3 (D0), gdyż jest tam podłączony pin RX portu szeregowego połączony z programatorem. Przykładowe połączenie modułu odbiornika z płytką Nucleo przedstawiono w poniższej tabeli:
| Pin odbiornika |
Pin KA-NUCLEO-F411CE | Pin mikrokontrolera STM32F411 |
| D0 | D5 | PB4 |
| D1 | D3 | PB3 |
| D2 | D2 | PA10 |
| D3 | D1 | PA2 |
| VT | D6 | PB10 |
| 5 V | +5 V | – |
| GND | GND | – |
Urządzenia, którymi można sterować za pomocą pilota to trzy różnokolorowe diody LED oraz buzzer aktywny. Diody należy połączyć szeregowo z rezystorem – wartość 270Ω dla napięcia sterującego 3,3 V jest odpowiednia. Oczywiście istnieje możliwość podłączenia innych urządzeń sterowanych binarnie. Dzięki modułom z przekaźnikami można sobie pozwolić na sterowanie urządzeń wymagających większego napięcia/większej mocy niż można uzyskać z mikrokontrolera. Przypisanie pinów do urządzeń w tym przykładzie przedstawiono w tabeli:
| Pin KA-NUCLEO-F411CE | Urządzenie | Pin mikrokontrolera STM32F411 |
| D8 | Dioda czerwona | PA9 |
| D9 | Dioda zielona | PB7 |
| D10 | Dioda żółta | PB6 |
| D11 | pin sterujący buzzera | PA7 |
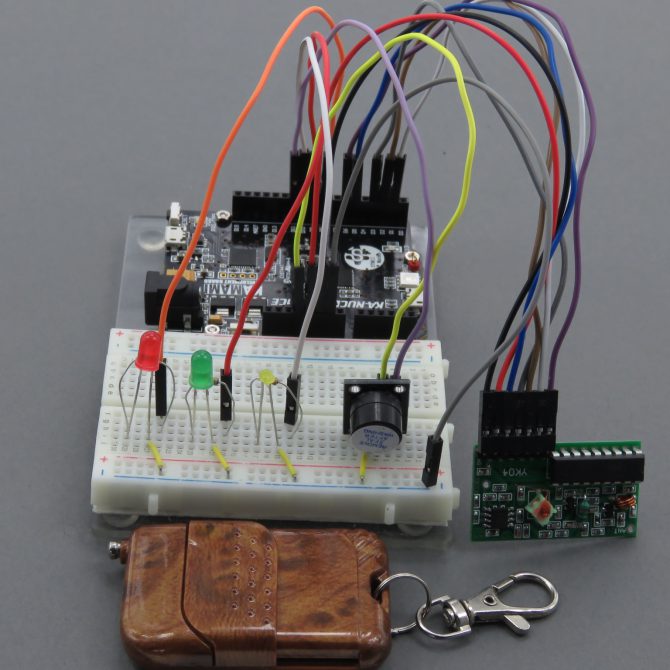
Zmontowany układ można obejrzeć na poniższym zdjęciu:
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



