





[PRZYKŁAD] Sterowanie wieloma serwomechanizmami – 16-kanałowy sterownik serwomechanizmów oraz KAmduino UNO
W artykule został przedstawiony sterownik, za pomocą którego możliwe jest sterowanie do 16 serwomechanizmów za pomocą interfejsu I2C. Sygnał PWM pochodzący ze sterownika może być wykorzystany także np. do sterowania diodami LED lub jako źródło sygnałów sterujących dla sterowników silników prądu stałego.
Do realizacji przykładu potrzebne są następujące elementy:
- Płytka KAmduino UNO
- 16-kanałowy sterownik serwomechanizmów
- Kilka serwomechanizmów np. Servo MG996R
- Źródło zasilania np. zasilacz laboratoryjny

Zdjęcie 1. Moduł 16-kanałowego sterownika serwomechanizmów
Sterownik użyty w projekcie pozwala na obsługę do 16 serwomechanizmów. Ma on 16 wyjść, do których można podłączyć standardowe serwa modelarskie. Płytka została oparta o układ PCA9685. Zasilanie serwomechanizmów odbywa się z zewnętrznego źródła zasilania, które podłącza się do modułu za pomocą złącza śrubowego. Do komunikacji służy interfejs I2C, który może być używany zarówno z logiką 3,3 V jak i 5V. Możliwa jest zmiana adresu pojedynczego modułu przy pomocy odpowiednich zworek znajdujących się na module, co pozwala na podłączenie nawet kilku takich modułów do jednego wyjścia I2C. Oprócz sterowania pracą serwomechanizmów, do wyjść można podłączyć np. diody LED lub sterowniki silników DC, które mają wejścia na sygnał PWM. Sygnał PWM generowany na wyjściach może mieć częstotliwość do 60 MHz. Moduł wymaga własnoręcznego przylutowania złącz do płytki PCB (znajdują się one w zestawie z płytką).
Połączenie z płytką sterującą (tutaj KAmduino UNO) jest niezwykle proste – należy podłączyć zasilanie 5 V (piny VCC oraz GND) oraz piny interfejsu I2C (SDA oraz SCL). Zostało to przedstawione w poniższej tabeli:
| Pin KAmduino UNO | Pin sterownika serwomechanizmów |
| +5V | VCC |
| GND | GND |
| A4 | SDA |
| A5 | SCL |
Do sterownika można podłączyć do 16 serwomechanizmów. Zasilanie pobierane jest z pinu „V+” lub ze złącza śrubowego. W przykładzie sterowane są 4 serwomechanizmy.
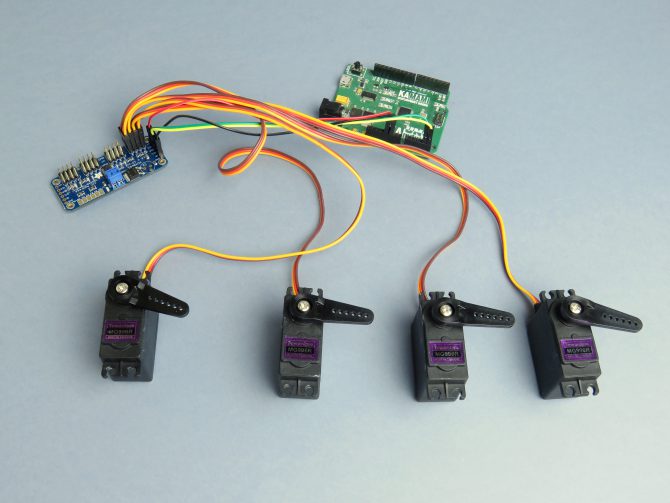
Rysunek 2. Serwomechanizmy podłączone do 16-kanałowego sterownika serwomechanizmów
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 



