





Aris Edge S3A3 – moduł z mikrokontrolerem Renesas Synergy S3
Renesas oferuje bardzo silne wsparcie programowe dla programistów. Do tej pory można było używać świetnego, bezpłatnego firmowego pakietu IDE znanego jako e2studio, zintegrowanego z firmowym pakietem SSP. Od pewnego czasu dostępny jest bezpłatny pakiet IAR Embedded Workbench, przeznaczony dla projektów z wykorzystaniem mikrokontrolerów Renesas Synergy. Pakiet IAR współpracuje z samodzielnym konfiguratorem SSC oferowanym przez Renesas. To wsparcie powoduje, że IAR Workbench ma takie same możliwości używania SSC i ich konfigurowania jak e2studio.
Firma Reloc, producent modułu, oferuje wsparcie projektów w postaci plików z rozszerzeniem .PACK używanych w bezpłatnym środowisku programowym e2studio. Pliki .PACK są przygotowywane dla konkretnej wersji bibliotek SSP i żeby ich używać musi być wybrana w konfiguracji odpowiednia wersja SSP. Dla naszego modułu w momencie pisania artykułu były dostępne pliki Reloc.Aris_Edge3.1.3.3.PACK przeznaczony dla wersji SSP V1.3.3 i Reloc.Aris_Edge3.1.4.0.PACK przeznaczony dla wersji SSP V1.4.0. Wsparcie dla modułu Aris Edge pokażemy na podstawie przykładowego projektu środowiska e2studio v 6.2.0 i biblioteki SSP V1.4.0.
W pierwszym kroku trzeba skopiować plik Reloc.Aris_Edge3.1.4.0.PACK do katalogu Renesas\Synergy\e2studioV6.2.0\internal\projectgen\arm\packs. Po uruchomieniu e2studio tworzymy nowy projekt z menu narzędziowego File->New->Synergy C/C++ Project (rysunki 5, 6 i 7).
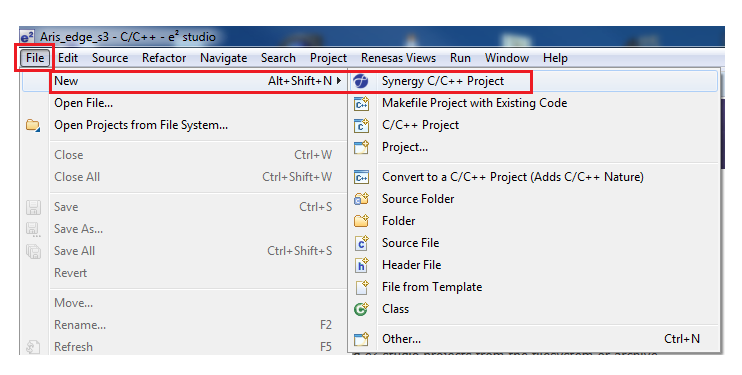 Rys.5. Nowy projekt Synergy
Rys.5. Nowy projekt Synergy
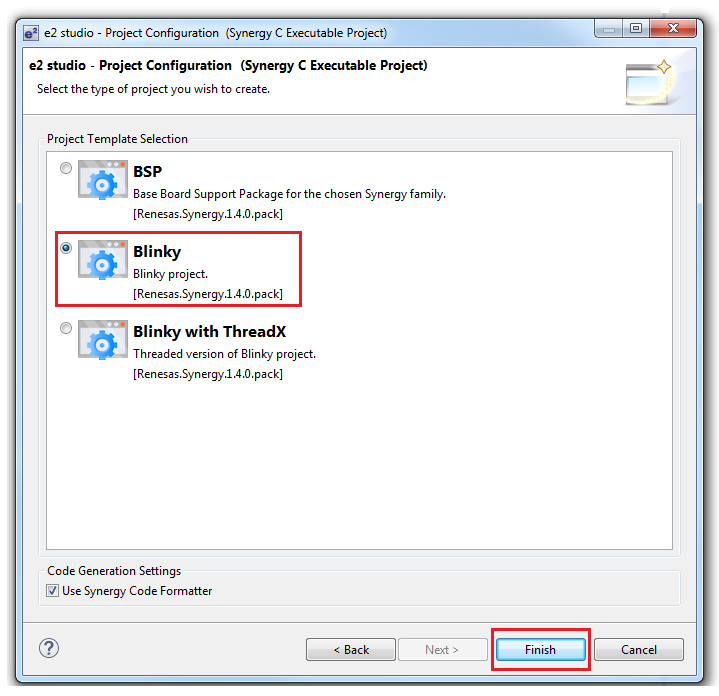
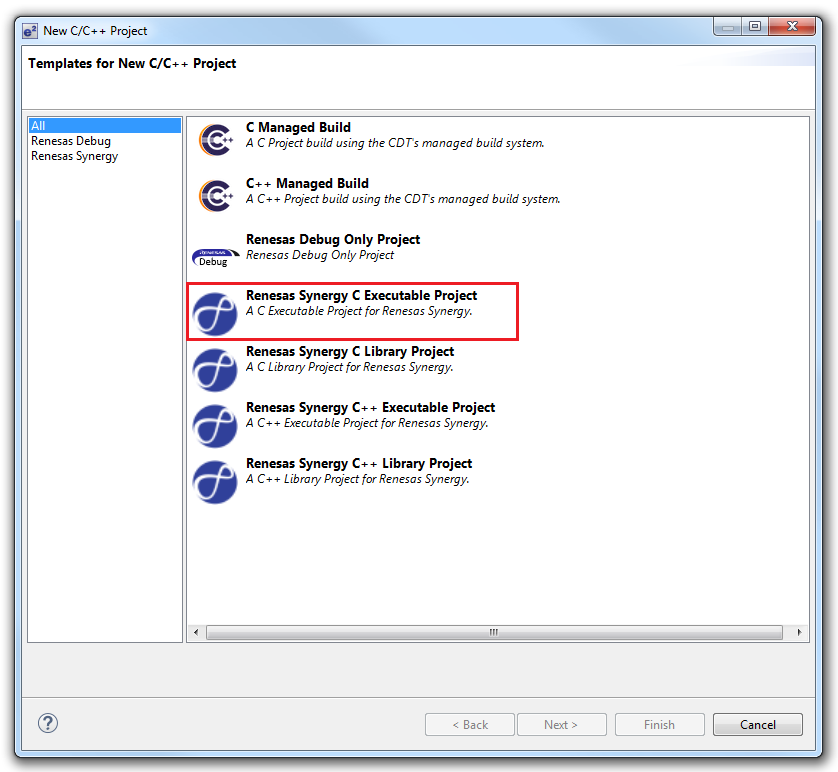 Rys.6. Wybór rodzaju projektu (Synergy C executable)
Rys.6. Wybór rodzaju projektu (Synergy C executable)
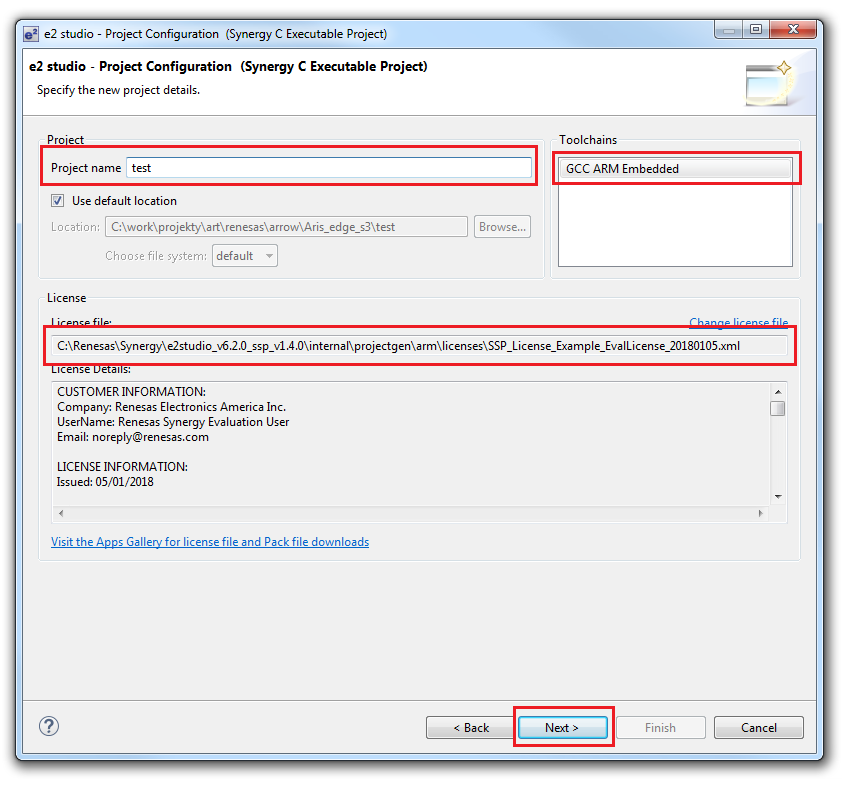 Rys.7. Nazwa projektu, ścieżki dostępu do projektu i plików licencji
Rys.7. Nazwa projektu, ścieżki dostępu do projektu i plików licencji
Na rysunku 8 zostało pokazane kolejne okno konfiguracji projektu, w którym wybiera się wersję zainstalowanej biblioteki SSP – w naszym przypadku V1.4.0 i wsparcie dla płyty Aris Edge 3. Możliwość wyboru aris_edge3 z rozwijanego okna board pojawi się po skopiowaniu pliku Reloc.Aris_Edge3.1.4.0.PACK do opisanej powyżej lokalizacji.
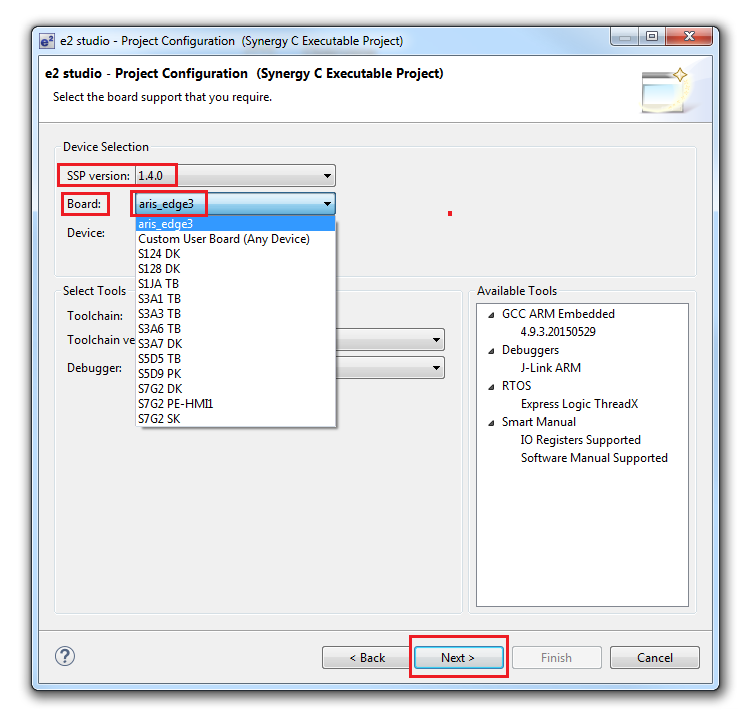
Rys.8. Wybór wersji biblioteki SSP i płyty Aris Edge 3
Ostatnim krokiem generowania projektu jest wybór rodzaju szkieletu. Do celów testowych możemy wybrać opcję Blinky. Wygenerowany projekt będzie cyklicznie zapalał i gasił diody LED2 i LED3 umieszczone na płytce. Na listingu pokazana jest procedura hal_entry.c wygenerowana przez kreator projektu i sterująca cyklicznym zapalaniem i gaszeniem diod LED2 i LED3.
/***********************************************************************************************************************
* File Name : hal_entry.c
* Description : This is a very simple example application that blinks all LEDs on a board.
***********************************************************************************************************************/
#include "hal_data.h"
/*******************************************************************************************************************//**
* @brief Blinky example application
*
* Blinks all leds at a rate of 1 second using the software delay function provided by the BSP.
* Only references two other modules including the BSP, IOPORT.
*
**********************************************************************************************************************/
void hal_entry(void) {
/* Define the units to be used with the software delay function */
const bsp_delay_units_t bsp_delay_units = BSP_DELAY_UNITS_MILLISECONDS;
/* Set the blink frequency (must be <= bsp_delay_units */
const uint32_t freq_in_hz = 2;
/* Calculate the delay in terms of bsp_delay_units */
const uint32_t delay = bsp_delay_units/freq_in_hz;
/* LED type structure */
bsp_leds_t leds;
/* LED state variable */
ioport_level_t level = IOPORT_LEVEL_HIGH;
/* Get LED information for this board */
R_BSP_LedsGet(&leds);
/* If this board has no LEDs then trap here */
if (0 == leds.led_count)
{
while(1); // There are no LEDs on this board
}
while(1)
{
/* Determine the next state of the LEDs */
if(IOPORT_LEVEL_LOW == level)
{
level = IOPORT_LEVEL_HIGH;
}
else
{
level = IOPORT_LEVEL_LOW;
}
/* Update all board LEDs */
for(uint32_t i = 0; i < leds.led_count; i++)
{
g_ioport.p_api->pinWrite(leds.p_leds[i], level);
}
/* Delay */
R_BSP_SoftwareDelay(delay, bsp_delay_units);
}
}
Listing 1. Procedura sterująca zapaleniem i gaszeniem diod LED modułu
 Rys.9. Wybór szkieletu projektu
Rys.9. Wybór szkieletu projektu
Po kliknięciu na przycisk Finish, kreator projektu wygeneruje wszystkie niezbędne pliki źródłowe i pliki pomocnicze, w tym plik konfiguratora otwierany w oknie perspektywy Synergy Configuration.
Wybór aris_edge3 w oknie Board powoduje, że konfigurator projektu umieści kilka plików dodatkowych w folderze aris_edge3 – zostało to pokazane na rysunku 10. Poza definiowaniem diod LED2 i LED3 (listing 2) nie znajdziemy tam zbyt wielkiego wsparcia dla układów peryferyjnych. Dlatego należy je traktować jako szkielet wypełniany przez użytkownika zależnie od potrzeb.
/***********************************************************************************************************************
* Private global variables and functions
**********************************************************************************************************************/
/** Array of LED IOPORT pins. */
static const ioport_port_pin_t g_bsp_prv_leds[] =
{
IOPORT_PORT_03_PIN_03, ///< LED2
IOPORT_PORT_01_PIN_13, ///< LED3
};
/***********************************************************************************************************************
* Exported global variables (to be accessed by other files)
**********************************************************************************************************************/
/** Structure with LED information for this board. Recommended to get this information through R_BSP_LedsGet() function
* instead of using this structure directly to remove dependency on structure name. */
const bsp_leds_t g_bsp_leds =
{
.led_count = (uint16_t)(((uint16_t)sizeof(g_bsp_prv_leds) / (uint16_t)sizeof(g_bsp_prv_leds[0U]))),
.p_leds = &g_bsp_prv_leds[0]
};
Listing 2. Wsparcie użycia diod LED z pliku bsp_leds.c
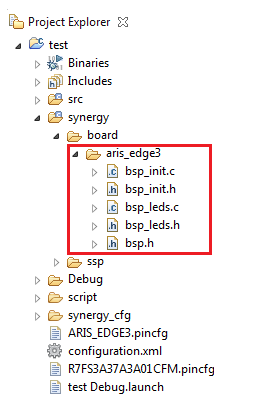 Rys.10. Pliki związane z wyborem płyty aris_edge3
Rys.10. Pliki związane z wyborem płyty aris_edge3
Trochę inaczej wygląda wsparcie pliku .PACK konfiguracji wyprowadzeń mikrokontrolera zapisanej w pliku configuration.xml i dostępnej w zakładce Pins perspektywy Configurations. Zdefiniowano tu wstępnie przypisania wyprowadzeń peryferiów do wyprowadzeń mikrokontrolera. Na przykład w standardzie Arduino interfejs I2C jest wyprowadzony na piny 9, 10 złącza J6. Do tego złącza są podłączone sygnały z portów P205 i P206 skonfigurowane jako linie SDA i SCL portu szeregowego I2C. Zostało to pokazane na rysunku 11.
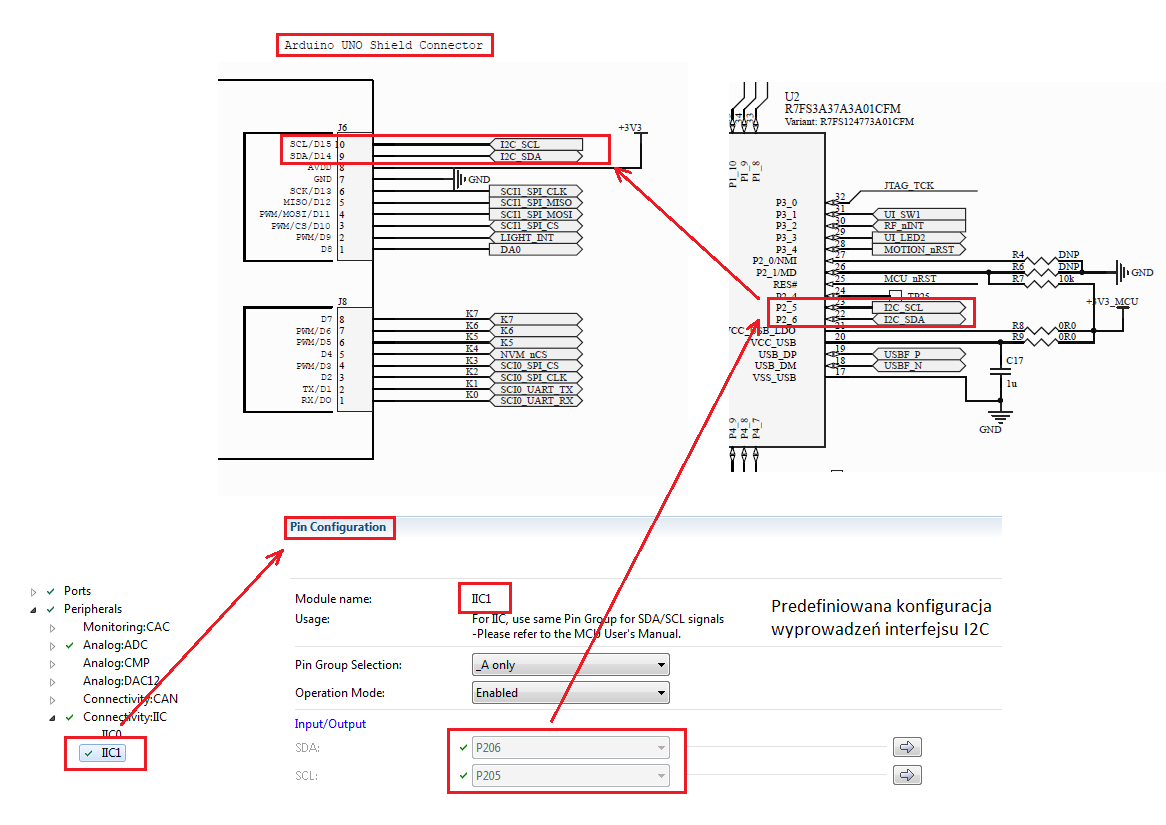
Rys.11. Predefiniowana definicja wyprowadzeń modułu komunikacyjnego I2C
Jeżeli użytkownik chce korzystać z interfejsów komunikacyjnych, dla których przygotowano konfiguracje Pins, musi zdefiniować drivery do układów peryferyjnych. Na rysunku 12 pokazano przykład dodawania drivera dla interfejsu I2C.
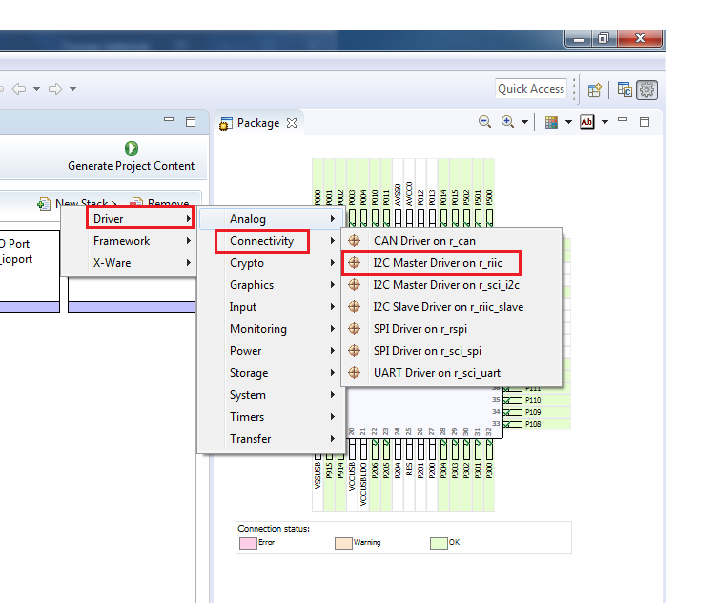
Rys.12. Dodawanie obsługi interfejsu I2C Master w zakładce Thread
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






