





Digilent Pmod i STM32 (cz. 6) – PmodACL2, PmodDPOT i PmodSSD
Szósty odcinek cyklu poświęconego modułom Digilent Pmod to trzy kolejne układy: akcelerometr PmodACL2, potencjometr cyfrowy PmodDPOT i podwójny wyświetlacz siedmiosegmentowy PmodSSD. Przykłady dla wymienionych modułów przygotowano dla środowiska Atollic TrueSTUDIO i zestawu uruchomieniowego KAmeleon (www.kameleonboard.org) z wykorzystaniem biblioteki STM32Cube_FW_L4.
PmodACL2
Moduł PmodACL2 zawiera 3-osiowy akcelerometr MEMS – ADXL362 od firmy Analog Devices. Akcelerometr zapewnia 12-bitową rozdzielczość pomiaru oraz trzy możliwe do ustawienia zakresy: ±2g, ±4g, ±8g, charakteryzujące się odpowiednio czułością: 1 mg/LSB, 2 mg/LSB, 4 mg/LSB. Układ posiada również konfigurowalną częstotliwość odczytu danych, która może przyjąć jedną z wartości: 12,5 Hz, 25 Hz, 50 Hz, 100 Hz, 200 Hz, 400 Hz. Akcelerometr charakteryzuje się bardzo małym poborem prądu o maksymalnej wartości dochodzącej do 5 µA przy napięciu zasilania wynoszącym 3,5 V i maksymalnej prędkości odczytu danych. Poza pomiarem przyspieszenia, układ ADXL362 umożliwia także pomiar temperatury z rozdzielczością 12 bitów i czułością 0,065°C/LSB.
 Fotografia 1. Moduł PmodACL2
Fotografia 1. Moduł PmodACL2
Akcelerometr ADXL362
Układ ADXL362 posiada szereg funkcji do przetwarzania danych pomiarowych, takich jak:
- detekcja aktywności,
- detekcja swobodnego spadku,
- kolejka FIFO dla danych pomiarowych.
Na szczególną uwagę zasługuje możliwość wykorzystania kolejki FIFO do zapisu historii pomiarów prowadzących do wykrycia aktywności definiowanej konfigurowalnymi progami dla każdej z osi. Umożliwia to mikrokontrolerowi odczyt całego profilu przyspieszenia po otrzymaniu przerwania, którego źródłem jest zdarzenie wykryte przez układ ADXL362.
Akcelerometr udostępnia kilka źródeł przerwań, które mogą zostać przyporządkowane niezależnie do jednego z dwóch sygnałów INT1, lub INT2:
- AWAKE – wybudzenie przez wykrycie aktywności lub uśpienie przez wykrycie braku aktywności,
- INACT – wykrycie braku aktywności, lub swobodnego spadku,
- ACT – wykrycie aktywności,
- FIFO_OVERRUN – przepełnienie kolejki FIFO,
- FIFO_WATERMARK – zapełnienie kolejki do ustalonego poziomu,
- FIFO_READY – gotowość do odczytu co najmniej jednej wartości z kolejki FIFO,
- DATA_READY – gotowość do odbioru nowej zmierzonej wartości.
Zdarzenia dotyczące wykrywaniu aktywności lub jej braku wymagają zdefiniowania progu przyspieszenia oraz minimalnego czasu jego przekroczenia.
Komunikacja z modułem PmodACL2
Z modułem PmodACL2 można komunikować się za pośrednictwem interfejsu SPI i trzech dostępnych komend:
- Write register (0x0A) – zapis rejestrów,
- Read register (0x0B) – odczyt rejestrów,
- Read FIFO (0x0D) – odczyt kolejki FIFO.
Komendom do obsługi rejestrów musi zawsze towarzyszyć 8-bitowy adres rejestru, a następnie co najmniej jeden bajt danych. W przypadku wielu bajtów danych, adres rejestru jest automatycznie inkrementowany wewnątrz układu ADXL362. Komenda odczytu FIFO nie wymaga dodatkowych parametrów – po jej wysłaniu układ automatycznie odpowiada danymi znajdującymi się w kolejce.
Moduł PmodACL2 posiada złącze SPI typu 2A z dwoma sygnałami przerwań. Złącze to można podłączyć do gniazda Pmod-SPI zestawu KAmeleon tak, jak to przedstawiono na fotografii 2. Piny mikrokontrolera podłączone do odpowiednich sygnałów modułu przedstawiono w tabeli 1.
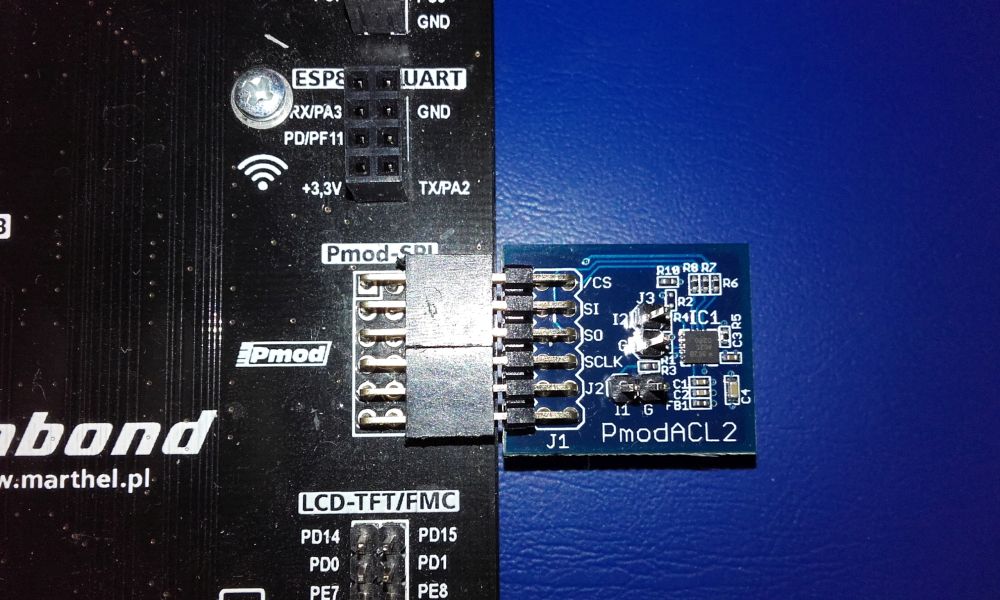 Fotografia 2. Moduł PmodACL2 podłączony do zestawu KAmeleon
Fotografia 2. Moduł PmodACL2 podłączony do zestawu KAmeleon
Tabela 1. Sygnały PmodACL2 oraz odpowiadające im piny mikrokontrolera; w tabeli pominięto sygnały niepołączone (NC) i linie zasilania występujące na złączu Pmod
| Sygnał | Numer pinu PmodACL (J1) | Pin STM32L496ZG (KAmeleon Pmod-SPI) |
| ~SS | 1 | PB0 |
| MOSI | 2 | PA7 |
| MISO | 3 | PE14 |
| SCLK | 4 | PA1 |
| INT2 | 7 | PE12 |
| INT1 | 8 | PE13 |
Kod przykładu
Obsługa modułu PmodACL2 w prezentowanym przykładzie znajduje się w plikach inc/PmodACL2.h i src/PmodACL2.c i składa się z czterech funkcji:
- PmodACL2_Config – konfiguracja peryferiów mikrokontrolera i rejestrów akcelerometru,
- PmodACL2_ReadFifo – odczyt danych z kolejki FIFO,
- PmodACL2_ReadStatus – odczyt aktualnego stanu źródeł przerwań,
- PmodACL2_ConvertFifoEntry – konwersja wartości odczytanej z kolejki na liczbę całkowitą ze znakiem.
Pierwszą z funkcji przedstawiono na listingu 1. W pierwszej kolejności konfigurowany jest interfejs SPI w trybie 0 (CPOL = 0, CPHA = 0) z programową kontrolą sygnału CS. Długość danych jest ustawiona na 8 bitów. W pliku PmodACL2.c została także zdefiniowana funkcja HAL_SPI_MspInit, wywoływana wewnątrz funkcji bibliotecznej HAL_SPI_Init i odpowiedzialna za konfigurację GPIO dla interfejsu SPI (MISO, MOSI, SCLK, CS), a także włączenie odpowiednich sygnałów zegarowych.
Listing 1. Konfiguracja modułu PmodACL2
void PmodACL2_Config(void)
{
pmodAcl2Spi.Instance = SPI1;
pmodAcl2Spi.Init.Mode = SPI_MODE_MASTER;
pmodAcl2Spi.Init.Direction = SPI_DIRECTION_2LINES;
pmodAcl2Spi.Init.DataSize = SPI_DATASIZE_8BIT;
pmodAcl2Spi.Init.CLKPolarity = SPI_POLARITY_LOW;
pmodAcl2Spi.Init.CLKPhase = SPI_PHASE_1EDGE;
pmodAcl2Spi.Init.NSS = SPI_NSS_SOFT;
pmodAcl2Spi.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_128;
pmodAcl2Spi.Init.FirstBit = SPI_FIRSTBIT_MSB;
pmodAcl2Spi.Init.TIMode = SPI_TIMODE_DISABLE;
pmodAcl2Spi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
pmodAcl2Spi.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
HAL_SPI_Init(&pmodAcl2Spi);
writeRegister(0x1F, 0x52);
HAL_Delay(1);
uint16_t activityValueThreshold = 400;
uint16_t activityTimeThreshold = 5;
uint16_t inactivityValueThreshold = 100;
uint16_t inactivityTimeThreshold = 50;
writeRegister(0x20, activityValueThreshold & 0xFF);
writeRegister(0x21, (activityValueThreshold >> 8) & 0xFF);
writeRegister(0x22, activityTimeThreshold);
writeRegister(0x23, inactivityValueThreshold & 0xFF);
writeRegister(0x24, (inactivityValueThreshold >> 8) & 0xFF);
writeRegister(0x25, activityTimeThreshold & 0xFF);
writeRegister(0x26, (inactivityTimeThreshold >> 8) & 0xFF);
writeRegister(0x27, 0x3F);
writeRegister(0x28, 0x02);
writeRegister(0x2A, 0x90);
writeRegister(0x2D, 0x02);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Pin = GPIO_PIN_13;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0x0F, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
}
Konfiguracja rejestrów
Kolejnym zadaniem funkcji PmodACL2_Config jest konfiguracja rejestrów akcelerometru ADXL362. W pierwszej kolejności wykonywany jest reset układu w wyniku zapisu wartości 0x52 do rejestru SOFT_RESET, po którym należy odczekać co najmniej 0,5 ms. Reset ma na celu przywrócenie wszystkich rejestrów do ich domyślnych wartości. Są to m.in. zakres i częstotliwość odczytu danych (rejestr 0x2C FILTER_CTL) wynoszące odpowiednio ±2 g i 100 Hz. Następnie ustawiane są progi detekcji aktywności. Ustawiane wartości odnoszą się do aktualnie ustawionej rozdzielczości – dla wartości 400 i rozdzielczości 1 mg/LSB, aktywność będzie rozpoznawana po przekroczeniu progu 400 mg.
Oprócz wartości progu wpisywany jest także minimalny czas jego przekroczenia. Czas ten podawany jest w próbkach i jest ściśle związany z ustawioną częstotliwością odczytu danych (ODR).Warto zwrócić uwagę, że wszystkie wartości, poza minimalnym czasem przekroczenia progu aktywności, czyli: progi aktywności, braku aktywności i czas przekroczenia progu braku aktywności, są podzielone na dwa 8-bitowe rejestry (MSB i LSB), które należy ustawić niezależnie.
Następnym rejestrem jest 0x27 ACT_INACT_CTL, który zawiera dalszą konfigurację zdarzeń związanych z aktywnością. W przykładzie układ jest konfigurowany w trybie loop (wykrywanie zdarzeń aktywności i jej braku włączane naprzemiennie, przerwania potwierdzanie automatycznie bez ingerencji mikrokontrolera) z pomiarem referencyjnym (względem przyspieszenia referencyjnego obliczanego przez układ) uwzględniającym położenie początkowe. Rejestr 0x28 FIFO_CONTROL to konfiguracja kolejki FIFO – włączenie w trybie stream, w którym kolejka zawiera zawsze najnowsze dane, a najstarsze są usuwane. Bit 2. ustawiony na 0 oznacza, że kolejka nie przechowuje informacji o temperaturze. Zapis do kolejnego rejestru – 0x2A INTMAP1 – ustawia przerwania na linii INT1 aktywne w stanie niskim i włącza przerwanie od wykrycia aktywności. Ostatnia operacja zapisu – do rejestru 0x2D POWER_CTL – uruchamia pomiary.
Realizacja zapisu do rejestru
Do realizacji zapisu wykorzystywana jest funkcja pomocnicza – writeRegister, która kontroluje sygnał CS, wysyła komendę zapisu 0x0A, adres rejestru i wartość. Do obsługi interfejsu SPI używana jest biblioteczna funkcja HAL_SPI_Transmit.
Na koniec funkcja PmodACL2_Config konfiguruje pin PE13, podłączony do linii INT1 modułu PmodACL2, jako wejście przerwań wyzwalanych zboczem opadającym.
Obsługa kolejki FIFO
Druga z funkcji obsługujących moduł PmodACL2 – PmodACL2_ReadFifo, przedstawiona na listingu 2, jest odpowiedzialna za odczyt danych znajdujących się w kolejce FIFO akcelerometru. W pierwszej kolejności funkcja odczytuje 10-bitową liczbę elementów kolejki z dwóch rejestrów: 0x0C FIFO_ENTRIES_L i 0x0D FIFO_ENTRIES_H. Dane z kolejki są zapisywane do wewnętrznego bufora o długości MAX_FIFO_READ_LEN, a następnie kopiowane pod adres podany w argumencie, wewnątrz pomocniczej funkcji readFifo. Funkcja ta steruje linią CS, wysyła komendę odczytu kolejki 0x0D, a następnie odczytuje dane z akcelerometru. Wszystko odbywa się w ramach jednej transakcji SPI, co przedstawiono na listingu 3.
Listing 2. Odczyt liczby elementów z kolejki FIFO
void PmodACL2_ReadFifo(uint8_t* data, uint32_t* len)
{
// Read the number of entries currently stored in fifo.
uint8_t entriesLsb = readRegister(0x0C); // FIFO_ENTRIES_L register.
uint8_t entriesMsb = readRegister(0x0D); // FIFO_ENTRIES_H register.
// Each fifo entry is 2 bytes long.
*len = (entriesLsb | (entriesMsb << 8)) * 2;
// Make sure that the number of bytes does not exceed the fifo limit.
if(*len > MAX_FIFO_READ_LEN)
*len = MAX_FIFO_READ_LEN;
// Do not read from empty fifo.
if(*len == 0)
return;
readFifo(data, *len);
}
Listing 3. Odczyt kolejki FIFO
static void readFifo(uint8_t* data, uint32_t len)
{
// The local buffers used for SPI transaction. The additional byte is required
// for transmitting the command.
uint8_t txbuf[MAX_FIFO_READ_LEN + 1] = {0x00};
uint8_t rxbuf[MAX_FIFO_READ_LEN + 1] = {0x00};
txbuf[0] = SPI_READ_FIFO;
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&pmodAcl2Spi, txbuf, rxbuf, len + 1, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
if(data == NULL)
return;
// Copy the data to given buffer without the command byte.
for(uint32_t i = 0; i < len; i++)
data[i] = rxbuf[i + i];
}
Odczyt rejestru statusu
Następna funkcja realizuje odczyt rejestru stanu 0x0B STATUS. Wykorzystuje ona funkcję pomocniczą readRegister, która wysyła komendę odczytu rejestru – 0x0B oraz adres, a następnie odczytuje wartość znajdującą się w rejestrze. Tak jak w przypadku innych funkcji pomocniczych, ta równiez wywołuje funkcje z biblioteki STM32Cube: HAL_GPIO_WritePin do kontroli sygnału CS i HAL_SPI_TransmitReceive do transmisji danych po SPI. Obie funkcje – PmodACL2_ReadStatus i readRegister przedstawiono na listingach 4 i 5.
Listing 4. Odczyt rejestru stanu akcelerometru ADXL362
uint8_t PmodACL2_ReadStatus(void)
{
return readRegister(0x0B); // Read the interrupts status from STATUS register.
}
Listing 5. Funkcja pomocnicza do odczytu rejestru
static uint8_t readRegister(uint8_t address)
{
// Reading register requires sending read command and the address
// before obtaining the data byte.
uint8_t txbuf[3] = {SPI_READ_REG, address, 0x00};
uint8_t rxbuf[3] = {0x00};
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&pmodAcl2Spi, txbuf, rxbuf, 3, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
return rxbuf[2];
}
Odczyt i konwersja danych
Ostatnia z opisywanych funkcji – PmodACL2_ConvertFifoEntry, pełni rolę pomocniczą przy przetwarzaniu danych odczytanych z kolejki FIFO. Jej zadaniem jest konwersja dwóch bajtów odczytanych z kolejki na liczbę 16-bitową ze znakiem. Elementy FIFO zakodowano zgodnie ze schematem przedstawionym na rysunku 3: dwa najstarsze bity (14-15) zawierają informację o przyporządkowaniu wartości do osi lub o pomiarze temperatury, dwa kolejne bity (12-13) przechowują znak, a pozostałe – zmierzoną wartość. Z tego powodu, oprócz łączenia dwóch bajtów w jedną wartość 16-bitową, konieczne jest także rozszerzenie bitów znaku na bity 14. i 15. Operacje tą przedstawiono na listingu 6.
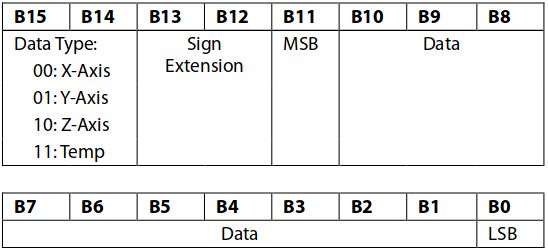 Rysunek 3. Struktura elementów kolejki FIFO
Rysunek 3. Struktura elementów kolejki FIFO
Listing 6. Konwersja 2-bajtowego elementu kolejki FIFO na wartość 16-bitową ze znakiem
int16_t PmodACL2_ConvertFifoEntry(uint8_t* data)
{
// Build the single value from 2-byte fifo entry.
int16_t convertedValue = data[0] | (data[1] << 8);
// Check the sign extension bits (12 and 13) and set the same state in bits 14 and 15
// to build the 16-bit signed integer acceleration value.
if(convertedValue & 0x3000)
return convertedValue | 0xC000;
else
return convertedValue & 0x3FFF;
}
Pozostałe operacje związane z konwersją danych odczytanych z kolejki FIFO zaimplementowano w funkcji main i przedstawiono na listingu 7. Po otrzymaniu przerwania sygnalizowanego flagą activityFlag następuje odczytanie danych z kolejki FIFO za pomocą opisywanej wcześniej funkcji PmodACL2_ReadFifo. Następnie w pętli for każde dwa bajty analizowane są pod kątem przynależności do jednej z osi (pomiary temperatury w przedstawionej konfiguracji nie są zapisywane do kolejki), a następnie konwertowane za pomocą funkcji PmodACL2_ConvertFifoEntry.
Listing 7. Odczyt i konwersja danych z kolejki FIFO
while(activityFlag == 0);
PmodACL2_ReadFifo(fifoData, &fifoLen);
int sampleIndex = 1;
for(int i = 0; i < fifoLen; i += 2) {
switch(fifoData[i+1] & 0xC0) {
case 0x00:
x = PmodACL2_ConvertFifoEntry(&fifoData[i]);
readX = 1;
break;
case 0x40:
y = PmodACL2_ConvertFifoEntry(&fifoData[i]);
readY = 1;
break;
case 0x80:
z = PmodACL2_ConvertFifoEntry(&fifoData[i]);
readZ = 1;
break;
}
}
Po zebraniu danych ze wszystkich trzech osi, co sygnalizowane jest za pomocą flag readX, readY i readZ, są one wysyłane za pośrednictwem portu szeregowego LPUART1, którego obsługa znajduje się w plikach src/serial.c.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






