





Digilent Pmod i STM32 (cz. 6) – PmodACL2, PmodDPOT i PmodSSD
PmodDPOT
Drugim z opisywanych modułów jest PmodDPOT z potencjometrem cyfrowym AD5160 od Analog Devices. Potencjometr posiada 256 pozycji, umożliwiających podział całkowitej rezystancji widzianej pomiędzy portami A i B (RAB). Całkowita rezystancja wynosi w sumie 10 kΩ. Zależność pomiędzy ustawieniem ślizgacza, a rezystancją pomiędzy między portami W i B (RWB) jest zgodna z równaniem:
 w której D jest konfigurowaną pozycją ślizgacza w zakresie od 0 do 255, natomiast RW jest jego rezystancją wynoszącą 60 Ω. Analogicznie przedstawia się zależność dla portów W i A:
w której D jest konfigurowaną pozycją ślizgacza w zakresie od 0 do 255, natomiast RW jest jego rezystancją wynoszącą 60 Ω. Analogicznie przedstawia się zależność dla portów W i A:
Interfejs SPI
Do komunikacji z układem służy interfejs SPI, za pomocą którego można konfigurować pozycję ślizgacza. Odbywa się to przez wysłanie pojedynczego bajtu, zawierającego żądaną pozycję, która jest jednocześnie wartością D w przedstawionych wcześniej zależnościach.
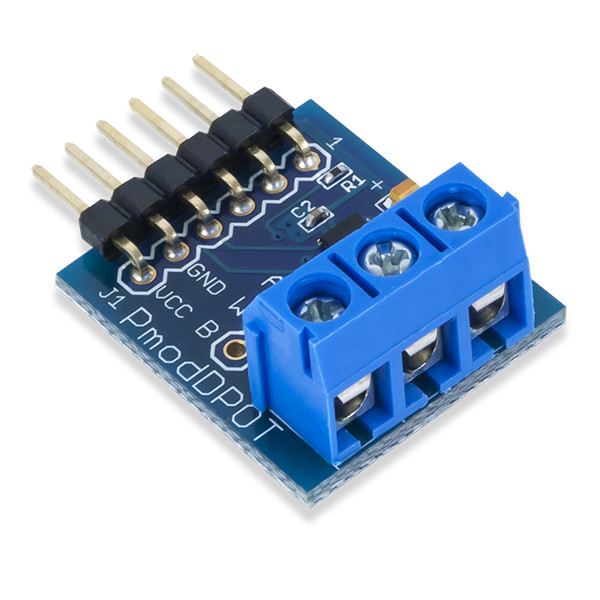 Fotografia 4. Moduł PmodDPOT
Fotografia 4. Moduł PmodDPOT
Moduł posiada sześciopinowe złącze SPI typu 2, które może zostać podłączone do gniazda Pmod-SPI zestawu KAmeleon, tak jak na fotografii 5. Lista wyprowadzeń mikrokontrolera połączonych z pinami modułu PmodDPOT została przedstawiona w tabeli 2. Komunikacja odbywa się tylko w jedną stronę: od mikrokontrolera do modułu.
 Fotografia 5. Moduł PmodDPOT podłączony do zestawu KAmeleon
Fotografia 5. Moduł PmodDPOT podłączony do zestawu KAmeleon
Tabela 2. Sygnały PmodDPOT oraz odpowiadające im piny mikrokontrolera; w tabeli pominięto sygnały niepołączone (NC) i linie zasilania występujące na złączu Pmod
| Sygnał | Numer pinu PmodDPOT (J1) | Pin STM32L496ZG (KAmeleon Pmod-SPI) |
| ~CS | 1 | PB0 |
| MOSI | 2 | PA7 |
| SCLK | 4 | PA1 |
Kod przykładu
Kod do obsługi modułu PmodDPOT w prezentowanym przykładzie znajduje się w plikach src/PmodDPOT.c i inc/PmodDPOT.h. Konfiguracja interfejsu SPI, znajdująca się w funkcji PmodDPOT_Config, wygląda analogicznie jak dla opisywanego wcześniej modułu PmodACL2 – tryb 0 z programową kontrolą sygnału ~CS. Piny GPIO są jak zwykle konfigurowane przez funkcję HAL_SPI_MspInit wywoływaną wewnątrz funkcji bibliotecznej HAL_SPI_Init. Ostatnia z funkcji – PmodDPOT_SetValue, jest odpowiedzialna za zmianę ustawienia ślizgacza. Została ona przedstawiona na listingu 8.
Listing 8. Funkcja PmodDPOT_SetValue
void PmodDPOT_SetValue(uint8_t value)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_Transmit(&pmodDpotSpi, (uint8_t*)&value, 1, 100);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
}
Główna pętla programu wykonuje co 100 ms zmianę ustawienia ślizgacza w zakresie od 0 do 255. Można to obserwować przez pomiar rezystancji RWA, lub RWB.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






