





Digilent Pmod i STM32 (cz. 7) – PmodBT2, PmodTC1 i PmodCLP
PmodCLP
Ostatni z modułów opisywanych w tej części cyklu, PmodCLP, posiada wyświetlacz znakowy LCD zawierający 2 linie po 16 znaków. W roli kontrolera wyświetlacza użyto układu KS0066 firmy Samsung obsługującego wyświetlacze jedno- i dwuliniowe. Komunikacja z nim odbywa się za pomocą interfejsu równoległego, przez który wysyłane są zarówno komendy, jak i dane do wyświetlenia.
 Fotografia 6. Moduł PmodCLP
Fotografia 6. Moduł PmodCLP
Sterowanie układu KS0066
Układ KS0066 posiada trzy typy wewnętrznej pamięci:
- CGROM – zawiera predefiniowany zestaw 192 znaków o rozmiarze 5×8 pikseli,
- CGRAM – umożliwiaja zdefiniowanie do 8 znaków użytkownika,
- DDRAM – przechowująca aktualnie wyświetlany zestaw znaków.
Wyświetlenie napisu jest możliwe przez zapis do pamięci DDRAM za pośrednictwem interfejsu równoległego, którego sygnały przedstawiono w tabeli 5. Za jego pomocą można także konfigurować wyświetlacz wysyłając do niego instrukcje. Część dostępnych instrukcji, użytych w przykładzie, razem z wybranymi parametrami została przedstawiona w tabeli 6. Szczegóły dotyczące wszystkich instrukcji, a także ich struktury znajdują się w dokumentacji modułu na stronie:
https://reference.digilentinc.com/reference/pmod/pmodclp/reference-manual
Tabela 5. Sygnały sterujące modułem PmodCLP
| Sygnał | Opis |
| DB0-DB7 | 8-bitowa szyna danych i instrukcji |
| RS | Tryb instrukcji (stan niski) i danych (stan wysoki) |
| R/W | Tryb zapisu (stan niski) i odczytu (stan wysoki) |
| E | Wyzwalanie zapisu (na zboczu opadającym) lub tryb odczytu (w stanie wysokim) |
Tabela 6. Opis komend użytych w przykładzie wraz z ich parametrami
| RS | R/W | DB7-DB0 | Opis |
| 0 | 0 | 0x38 | 8-bitowe dane (DB4 = 1), 2 linie (DB3 = 1), rozmiar znaku 5×8 (DB2 = 0) |
| 0 | 0 | 0x0C | Włączenie wyświetlacza (DB2 = 1), niewidoczny kursor (DB1 = 0) |
| 0 | 0 | 0x01 | Wyczyszczenie wyświetlacza |
| 0 | 0 | 0x06 | Przesuwanie kursora w prawo (DB1 = 1), wyłączenie przesuwania napisu (DB0 = 0) |
| 0 | 0 | 0x80 | Ustawienie kursora na początku pierwszej linii |
| 0 | 0 | 0xC0 | Ustawienie kursora na początku drugiej linii |
Połączenie z płytką KAmeleon
Ze względu na dużą liczbę sygnałów, moduł PmodCLP podłączono do złącza ARDUINO CONNECTOR według tabeli 7. W przykładzie używane są tylko komendy do zapisu danych i instrukcji, dlatego piny mikrokontrolera mogą być skonfigurowane wyłącznie jako wyjścia.
Tabela 7. Sposób podłączenia modułu PmodCLP do płytki KAmeleon
| Sygnał | Numer pinu PmodCLP | Numer pinu KAmeleon ARDUINO CONNECTOR | Pin mikrokontrolera |
| DB0 | 1 (J1) | D0 | PC5 |
| DB1 | 2 (J1) | D1 | PC4 |
| DB2 | 3 (J1) | D2 | PD6 |
| DB3 | 4 (J1) | D3 | PB6 |
| GND | 5 (J1) | GND | – |
| VCC | 6 (J1) | +3,3 | – |
| DB4 | 7 (J1) | D4 | PB9 |
| DB5 | 8 (J1) | D5 | PD9 |
| DB6 | 9 (J1) | D6 | PD10 |
| DB7 | 10 (J1) | D7 | PB11 |
| GND | 11 (J1) | – | – |
| VCC | 12 (J1) | – | – |
| RS | 1 (J2) | D8 | PD11 |
| R/W | 2 (J2) | D9 | PB13 |
| E | 3 (J2) | D10 | PB12 |
| NC | 4 (J2) | – | – |
| GND | 5 (J2) | – | – |
| VCC | 6 (J2) | – | – |
Kod przykładu
Obsługa wyświetlacza znajduje się w plikach inc/PmodCLP.h, a także src/PmodCLP.c. W pierwszym z nich znajdują się definicje użytych pinów, portów, a także funkcji włączających sygnały zegarowe. Służą one ułatwieniu konfiguracji ze względu na duża liczbę sygnałów. Za samą konfigurację odpowiedzialna jest funkcja PmodCLP_Config. Włącza sygnały zegarowe dla kolejnych portów, a także konfiguruje piny jako wyjścia. Następnie program inicjalizację wyświetlacza, którą przedstawiono na listingu 8. Jest ona zgodna z procedują inicjalizacji przedstawioną w dokumentacji modułu, natomiast użyte w niej komendy zostały wyjaśnione w tabeli 6. Zastosowane opóźnienia pomiędzy instrukcjami zostały wydłużone ze względu na ograniczenie funkcji bibliotecznej HAL_Delay, która przyjmuje jedynie całkowitą liczbę milisekund.
Listing 8. Sekwencja inicjalizacji wyświetlacza
HAL_Delay(20); writeCommand(0x38); HAL_Delay(1); writeCommand(0x0C); HAL_Delay(1); writeCommand(0x01); HAL_Delay(2); writeCommand(0x06);
Funkcje pomocnicze
Podczas konfiguracji wykorzystywane są następujące funkcje pomocnicze ułatwiające zarządzanie pinami, a także korzystanie z interfejsu równoległego:
- configGpio – konfiguruje podany pin GPIO jako wyjście,
- setGpio – ustawia podany pin w stan wysoki,
- resetGpio – podaje stan niski na podany pin,
- writeGpio – ustawia podany pin w dowolny stan przekazany jako argument,
- setDataBits – wystawia podaną wartość 8-bitową na liniach DB7 – DB0,
- writeCommand – wysyła podaną instrukcję,
- writeData – wysyła podany bajt danych.
Wyświetlanie napisów
Do wyświetlania napisów zaimplementowano funkcję PmodCLP_Write, przedstawioną na listingu 9. Przyjmuje ona numer linii, a także napis wraz z jego długością, a następnie wysyła go do wyświetlacza. Wybór linii (0, lub 1) odbywa się przez zapis instrukcji ustawiającej kursor na odpowiednim adresie pamięci DDRAM. Dane do wyświetlacza mogą być wysłane bezpośrednio w kodzie ASCII, ze względu na zastosowane mapowanie kodów znaków w pamięci CGROM.
Listing 9. Wysyłanie napisu na wyświetlacz
void PmodCLP_Write(uint8_t line, char* text, uint32_t len)
{
if(line >= MAX_LINES || len > MAX_LINE_CHARACTERS) return;
if(line == 0) writeCommand(0x80); else writeCommand(0xC0);
for(uint32_t i = 0; i < len; i++) writeData((uint8_t)text[i]);
}
Główna funkcja programu – main, wywołuje funkcję konfiguracji modułu PmodCLP, a także wyświetla napis:
Hello PmodCLP! KAmeleon Board
Efekt działania programu jest widoczny na fotografii 7.
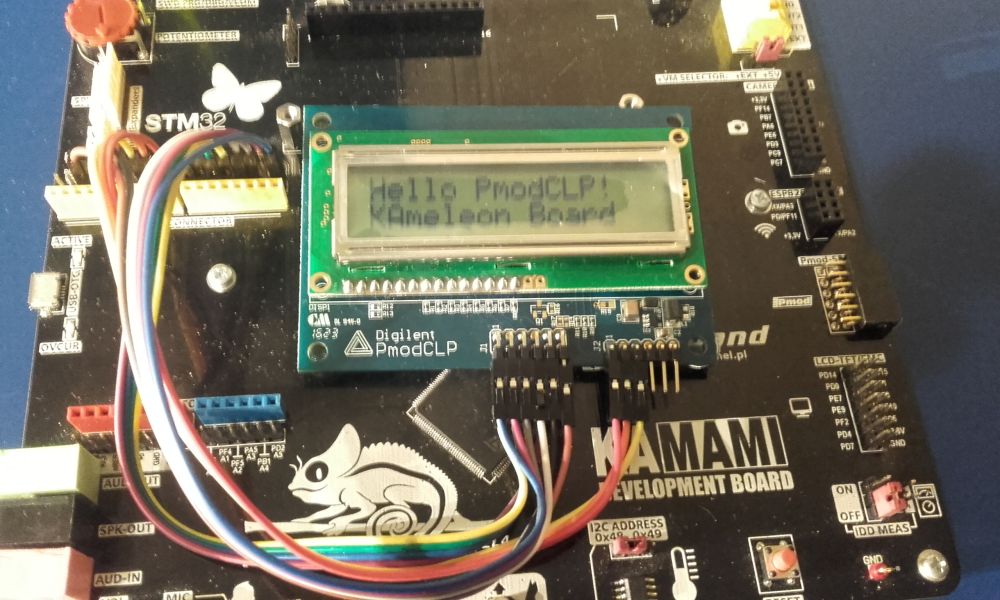 Fotografia 7. Wyświetlanie napisu na module PmodCLP
Fotografia 7. Wyświetlanie napisu na module PmodCLP
 Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii  Mieszacze aktywne – ćwiczenie z serii ADALM
Mieszacze aktywne – ćwiczenie z serii ADALM 






