





Digilent Pmod i STM32 (cz. 10) – PmodGYRO, PmodTMP3 i PmodWiFi
PmodWiFi
Ostatnim z przedstawianych modułów jest PmodWiFi, z wbudowanym modemem radiowym Wi-Fi MRF24WG0MA od firmy Microchip. Modem jest zgodny ze standardami IEEE 802.11b/g/n i umożliwia transmisję danych na odległość do 400 m, przy prędkości transmisji danych wynoszącej 1 lub 2 Mbps. Moduł PmodWiFi ma antenę PCB, dzięki czemu do jego użycia nie potrzebne są żadne dodatkowe komponenty. Do komunikacji z modemem służy interfejs SPI oraz generowane przez niego przerwania.
 Fotografia 8. Moduł PmodWiFi
Fotografia 8. Moduł PmodWiFi
Połączenie z zestawem KAmeleon
PmodWiFi ma 12-pinowe złącze SPI z dodatkowymi sygnałami WP (Write-protected) i HIBERATE. Sygnały te są podłączone przez rezystory do masy, dzięki czemu nie muszą być obsługiwane przez mikrokontroler. W przykładzie nie są one używane ze względu na brak podłączonych do nich pinów mikrokontrolera na złączu Pmod-SPI. Podłączenie modułu PmodWiFi do mikrokontrolera za pośrednictwem złącza Pmod-SPI, użytego w przykładzie zaprezentowano w tabeli 3 i na fotografii 9.
Tabela 3. Sygnały PmodWiFi oraz odpowiadające im piny mikrokontrolera; w tabeli pominięto sygnały niepodłączone do mikrokontrolera (WP i HYBERNATE) oraz linie zasilania występujące na złączu Pmod
| Sygnał | Numer pinu PmodWiFi (J1) | Pin STM32L496ZG (KAmeleon Pmod-SPI) |
| CS | 1 | PB0 |
| SDI | 2 | PA7 |
| SDO | 3 | PE14 |
| SCK | 4 | PA1 |
| INT | 7 | PE12 |
| RESET | 8 | PE13 |
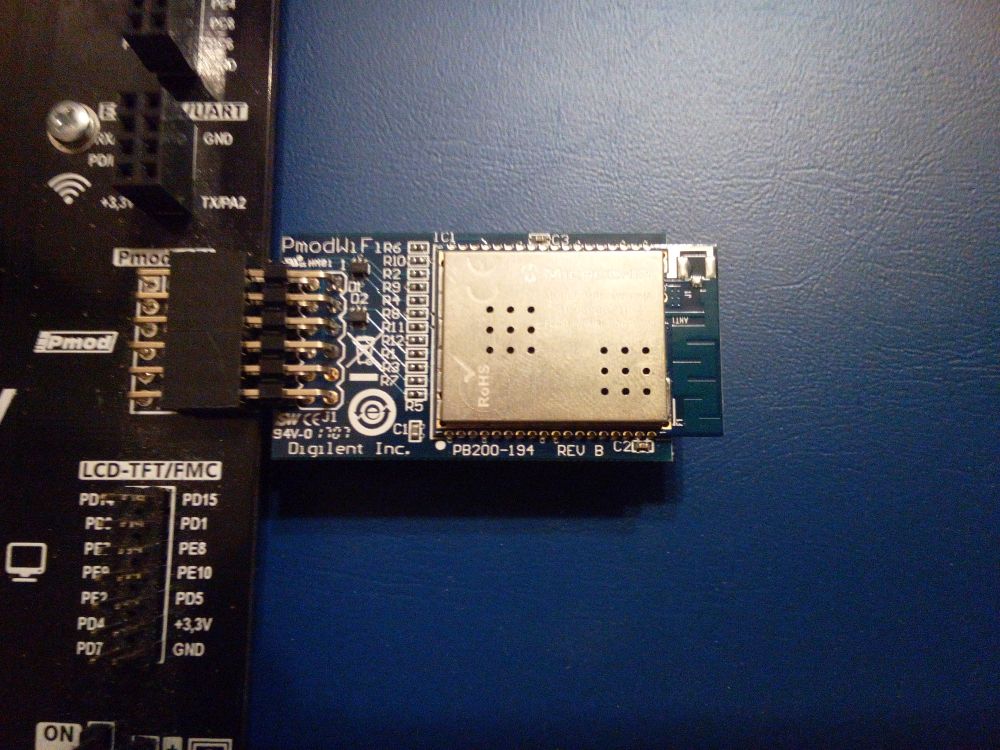 Fotografia 9. Moduł PmodWiFi podłączony do zestawu KAmeleon
Fotografia 9. Moduł PmodWiFi podłączony do zestawu KAmeleon
Sterownik modułu MRF24WG0MA
Do obsługi układu MRF24WG0MA firma Microchip udostępniła programowy stos TCP/IP przeznaczony dla mikrokontrolerów z rodziny PIC i dostępny na stronie www.microchip.com/wireless. Jednak z uwagi na to, że przykład został przygotowany dla mikrokontrolera z rodziny STM32, zastosowano stos CycloneTCP przygotowany przez firmę ORYX embedded i dostępny do pobrania ze strony www.oryx-embedded.com. Stos ten jest dostępny za darmo na licencji GPLv2 lub na jednej z licencji komercyjnych, a jego zaletą jest duża liczba wspieranych mikrokontrolerów oraz modemów. W przykładzie pokazano skanowanie widocznych sieci Wi-Fi, dlatego w katalogu Drivers znajduje się tylko sterownik modułu MRF24WG0MA (CycloneTCP_SSL_Crypto_Open_1_8_0/third_party/microchip/devices/mrf24wg/). Pozostałe źródła wchodzące w skład stosu są nieużywane, dlatego usunięto je z plików projektu.
Sterownik mrf24wg wymaga zdefiniowania kilku dodatkowych funkcji i definicji odpowiedzialnych za obsługę GPIO, SPI, przerwań oraz zliczania czasu. Zostały one umieszczone w plikach znajdujących się w katalogach inc i src w katalogu głównym projektu:
- wf_customize.h – konfiguracja sterownika, kolejności bajtów i komunikatów diagnostycznych,
- wf_eint_stub.c – konfiguracja i obsługa przerwań od pinu INT,
- wf_gpio_stub.c – obsługa pinu RESET,
- wf_spi_stub.c – konfiguracja i obsługa interfejsu SPI,
- wf_timer_stub.c – informacja o czasie systemowym.
Opisy funkcji
Opisy funkcji zaimplementowanych w powyższych plikach znajdują się w tabeli 4.
Tabela 4. Funkcje wymagane przez sterownik modemu mrf24wg
| Funkcja | Opis |
| WF_EintInit | Inicjalizacja przerwania od pinu INT aktywnego na zboczu opadającym. |
| WF_EintEnable | Włączenie przerwania od pinu INT. |
| WF_EintDisable | Wyłączenie przerwania od pinu INT. |
| WF_isEintDisabled | Sprawdzenie stanu przerwania od pinu INT (włączone lub nie). |
| ext1IrqHandler | Obsługa przerwania od pinu INT wyłączająca przerwania i wywołująca wewnętrzną funkcję sterownika odpowiedzialną za dalsze przetwarzanie przerwania. |
| WF_GpioInit | Inicjalizacja pinu RESET. |
| WF_GpioSetReset | Ustawienie żądanego stanu na pinie RESET. |
| WF_GpioSetHibernate | Ustawienie żądanego stanu na pinie HIBERNATE. Funkcja jest wymagana przez sterownik, jednak w przykładzie jest pusta ze względu na niepodłączony sygnał HIBERNATE. |
| WF_SpiInit | Inicjalizacja interfejsu SPI w trybie 0 (CPOL = 0, CPHA = 0) z programową obsługa pinu CS; inicjalizacja sygnałów SDI, SDO i SCK. |
| WF_SpiEnableChipSelect | Ustawienie pinu CS w stanie niskim (aktywnym). |
| WF_SpiDisableChipSelect | Ustawienie pinu CS w stanie wysokim (nieaktywnym). |
| WF_SpiTxRx | Wysyłanie i odbiór danych przez interfejs SPI. |
| WF_TimerInit | Inicjalizacja licznika dostarczającego liczbę milisekund od uruchomienia systemu. Funkcja jest pusta, ponieważ przykład używa licznika obsługiwanego przez bibliotekę STM32Cube. |
| WF_TimerRead | Odczyt liczby milisekund od startu systemu. Funkcja wykorzystuje bibliotekę STM32Cube (HAL_GetTick). |
Kod przykładu
Mając zaimplementowane wszystkie funkcje wymagane przez sterownik układu MRF24WG0MA można przejść do kodu głównego przykładowej aplikacji. Inicjalizacja wszystkich modułów znajduje się w funkcji main, przedstawionej na listingu 6. Za konfigurację sterownika odpowiada funkcja biblioteczna WF_Init, która z kolei wywołuje niezbędne funkcje opisane wyżej. Dodatkowo, pętla główna programu wywołuje funkcję WF_Task napędzająca maszynę stanów sterownika odpowiedzialną za sterowanie modemem oraz przetwarzanie danych.
Listing 6. Funkcja main przykładowej aplikacji dla modułu PmodWiFi
int main(void)
{
HAL_Init();
SystemClock_Config();
Serial_Config();
WF_Init();
while(1)
{
WF_Task();
}
}
Druga z funkcji w pliku main.c – HAL_GPIO_EXTI_Callback, wywołuje jedynie wspomnianą wcześniej funkcję ext1IrqHandler odpowiedzialną za obsługę przerwania od pinu INT.
Ostatnie dwie funkcje – WF_ProcessEvent oraz WF_RxPacketReady są wymagane przez sterownik. Pierwsza z nich, przedstawiona na listingu 7, obsługuje zgłaszane przez niego zdarzenia. W przykładzie są to: WF_EVENT_INITIALIZATION wysyłane po zakończeniu inicjalizacji i WF_EVENT_SCAN_RESULTS_READY wysyłane, gdy zakończy się skanowanie widocznych sieci Wi-Fi. Obsługa wszystkich zdarzeń zależy od aplikacji – w opisywanym programie wyniki skanowania są jedynie wypisywane na port szeregowy. Na listingu znajduje się także wywołanie DumpEventInfo, które wypisuje informacje diagnostyczne dotyczące otrzymanych zdarzeń. Druga z funkcji – WF_RxPacketReady nie jest używana w przykładzie, jednak jest wymagana przez sterownik, dlatego została pozostawiona pusta.
Listing 7. Obsługa zdarzeń dostarczanych przez sterownik mrf24wg
void WF_ProcessEvent(uint8_t eventType, uint32_t eventData)
{
DumpEventInfo(eventType, eventData);
if(eventType == WF_EVENT_INITIALIZATION && eventData == WF_INIT_SUCCESSFUL) {
WF_Scan();
} else if (eventType == WF_EVENT_SCAN_RESULTS_READY) {
for(int i=0; i<eventData; i++) {
t_scanResult res;
WF_ScanResultGet(i, &res);
res.ssid[res.ssidLen] = '\0';
printf("%d. [%s] RSSI:%d\r\n",i , res.ssid, res.rssi);
}
}
}
Wypisywanie danych na port szeregowy
Do przykładu został dołączony plik tiny_printf.c zawierający proste implementacje funkcji printf, fprintf i sprintf. Są one używane przez stos CycloneTCP do wypisywania informacji diagnostycznych. Do poprawnego działania tych funkcji konieczne jest zaimplementowanie funkcji _write odpowiedzialnej za wypisywanie znaków na port szeregowy. W przykładzie użyto do tego celu funkcji Serial_Write, zaimplementowanej w pliku serial.c i obsługującej port LPUART1.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






