





Budżetowy skaner laserowy 360° – LIDAR X4
LiDAR to urządzenie, które ma pozwala na detekcję i pomiar odległości od obiektu za pomocą promieni świetlnych. Działa na zasadzie odbiciowej – urządzenie emituje wiązkę lasera, a następnie wykrywa nadejście promienia odbitego od wykrywanej powierzchni. Następnie mierzy czas pomiędzy emisją i wykryciem przybycia odbitej wiązki. Na podobnej zasadzie działają np. radary. Nowoczesne lidary są w stanie wykrywać obiekty w trzech wymiarach, a nawet mapować obiekty znajdujące się w pobliżu.
Lidary są dzisiaj powszechnie stosowane do przestrzennego wykrywania obiektów w małej odległości. To urządzenie jest instalowane w najnowszych smartfonach, gdzie umożliwiają mierzenie odległości oraz korzystanie z aplikacji rozszerzonej rzeczywistości (AR). Lidary o większej mocy są stosowane do skanowania otoczenia, np. w pojazdach autonomicznych czy w rozmaitych zastosowaniach wymagających cyfrowego modelowania i analizy terenu. Stosuje się je również w meteorologii.
W tym artykule zaprezentujemy lidar w wersji na każdą kieszeń. Produkt LIDAR X4 może działać np. jako tańszy zamiennik znanych produktów firmy Slamtec. Układ pozwala na mapowanie terenu i sprawdzi się m.in. w robotyce, skanerach pomieszczeń czy nawigacji.
Budżetowy LIDAR X4
LIDAR X4 pozwala na dwuwymiarowe skanowanie dookólne, tj. o widoczności 360°. Zasięg skanowania wynosi od 12 centymetrów do 10 metrów. Częstotliwość pojedynczego pomiaru wynosi 5000 Hz, natomiast pełnego, dookólnego skanowania: od 6 do 12 Hz. Oznacza to, że rozdzielczość kątowa pomiaru, w zależności od ustawień, może wynosić od 0,13° do 0,86°. Laser sensora jest też zgodny z normą bezpieczeństwa FDA Class 1, co oznacza, że jest bezpieczny dla ludzkich oczu.
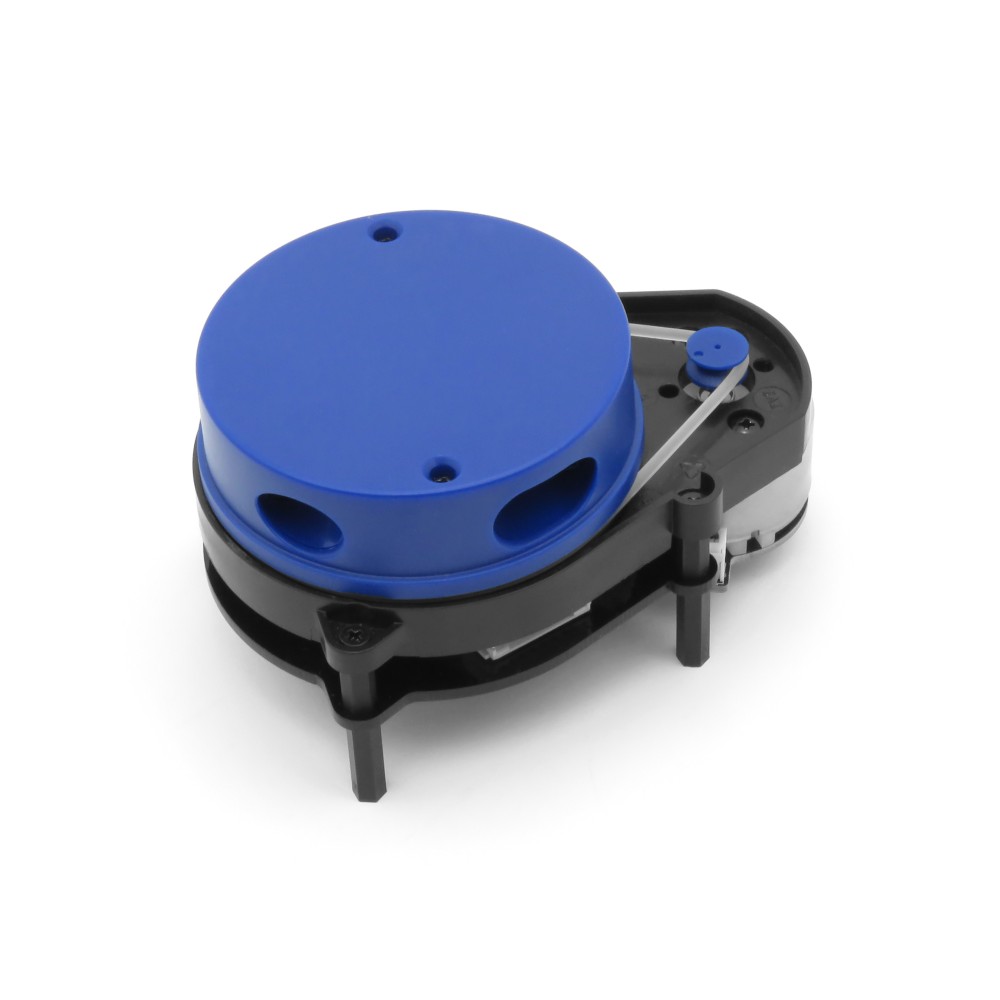 Rys. 1. Skaner LIDAR X4
Rys. 1. Skaner LIDAR X4
Skaner oferuje komunikację za pomocą portu USB-C, co oznacza, że można łączyć go z PC lub komputerem jednopłytkowym, takim jak Raspberry Pi. W tym celu dołączono do zestawu odpowiedni adapter. Płytka ta umożliwia także dołączenie dodatkowego zasilania poprzez zasilacz microUSB, w razie gdyby port nie był w stanie dostarczyć wystarczającej mocy do sensora.
 Rys. 2. Płytka adaptera do lidara
Rys. 2. Płytka adaptera do lidara
Adapter umożliwia podłączenie się do wyprowadzeń lidara poprzez USB. Można także wykorzystać samo złącze sensora. Złącze zawiera zasilanie, port szeregowy do komunikacji host-lidar, a także sterowanie prędkością silnika obracającego czujnik dookoła. Poniżej zamieszczono rozkład wyprowadzeń.
 Rys. 3. Rozkład wyprowadzeń złącza sensora LIDAR X4
Rys. 3. Rozkład wyprowadzeń złącza sensora LIDAR X4
W zestawie z czujnikiem znajdziemy także przewód USB-C, przewód z wyprowadzonymi „łysymi” kabelkami do zarobienia własnego złącza, a także śrubki umożliwiające montaż sensora do urządzenia.
Obsługa programowa sensora LiDAR X4
Do obsługi programowej czujnika dostarczono specjalny pakiet SDK. Umożliwia on implementację sensora we własnych projektach. Pozwala na obsługę API w językach C/C++, Python, a także C#. Dzięki pakietowi można łatwo odbierać dane z lidara poprzez specjalny protokół komunikacyjny, analizować dane oraz wykorzystywać je we własnych aplikacjach.
Pakiet jest dostępny m.in. na portalu github: https://github.com/YDLIDAR/YDLidar-SDK. Pod linkiem można także znaleźć pełną dokumentację i
YDLIDAR udostępnia także narzędzie do prezentacji działania sensora w systemie Windows. Oprogramowanie umożliwia wyświetlenie wykrywanych obiektów w formie mapy, zapisanie danych, a także prostą analizę (np. histogram). Link do programu: https://www.ydlidar.com/dowfile.html?cid=5&type=5
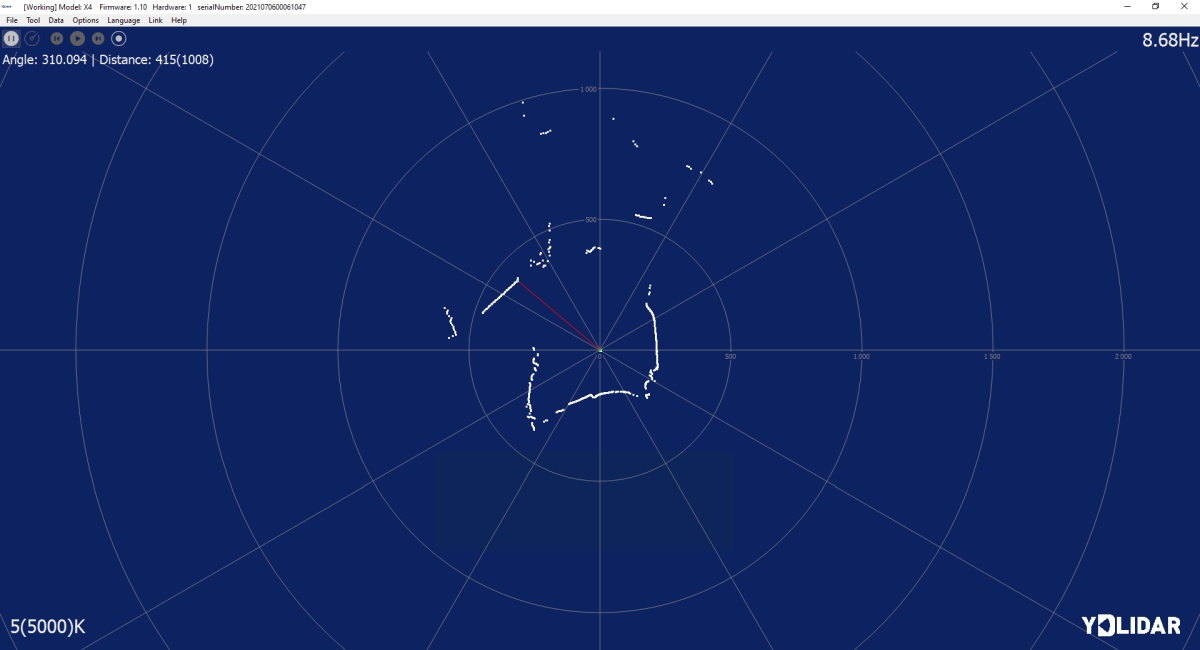 Rys. 4. Skan otoczenia za pomocą aplikacji demonstracyjnej YDLIDAR
Rys. 4. Skan otoczenia za pomocą aplikacji demonstracyjnej YDLIDAR
Ciekawym modelem integracji sensora jest także sterownik lidara dla systemu ROS. ROS to system open-source przeznaczony specjalnie do sterowania robotów. Dzięki dołączanym bibliotekom, oprogramowanie ma bardzo szerokie możliwości.
ROS sam w sobie nie jest systemem operacyjnym, chociaż zawiera wiele jego cech (np. abstrakcję sprzętową, sterowanie urządzeniami niskiego poziomu, przekazywanie wiadomości pomiędzy procesami). Z praktycznego punktu widzenia oznacza to, że ROS najczęściej stosowany jest jako pewnego rodzaju nakładka na podstawowy system operacyjny. Dostępny jest na najnowsze wersje systemów Ubuntu i Debian, co oczywiście pozwala wystartować system na komputerach jednopłytkowych i w systemach embedded.
Więcej informacji na stronie https://www.ros.org/
Integracja lidara w systemach robotycznych ma oczywistą zaletę. Pozwala opracować precyzyjny system wykrywania obiektów w otoczeniu urządzenia. Trudno sobie wyobrazić roboty poruszające się automatycznie, które są pozbawione takich sensorów. Przydatne są także w systemach typu „podnieś i opuść”. Sterownik na system ROS oznacza więc, że można łatwo wykorzystać zalety modelu X4 w szerokim zakresie rozwiązań robotycznych.
Sterownik dla LIDARA X4 na system ROS, a także informacje dotyczące wykorzystania modułu są dostępne na stronie: https://github.com/YDLIDAR/ydlidar_ros_driver
Podsumowanie
LIDAR X4 to dość interesujący produkt umożliwiający implementację możliwości lidara za stosunkowo niewielką cenę. Sensor dysponuje przyzwoitymi parametrami, które powinny wystarczyć do większości standardowych zastosowań. Model X4 może być alternatywą dla droższych modeli, które dysponują podobnymi parametrami. Dzięki sterownikowi dla systemu ROS oraz pakietowi SDK, lidar można łatwo skonfigurować i używać we własnej aplikacji.
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






