





Dokładność i rozdzielczość w magnetycznych czujnikach pozycji
Magnetyczne czujniki położenia, szczególnie położenia kątowego, to fundamentalne elementy niezliczonych układów sterowania ruchem. Takie sensory odgrywają kluczową rolę w wielu branżach, jak motoryzacja, robotyka, elektronika konsumencka czy medyczna, co świadczy o ich dużej uniwersalności.
Aby być w stanie zrealizować ich pełen potencjał, należy dogłębnie zrozumieć dwa kluczowe parametry: dokładność i rozdzielczość. Pomimo, że terminy te bywają używane zamiennie, to w słownictwie pomiarowym określają jednak dwa odrębne parametry. Poniższy artykuł ma na celu wytłumaczenie ich definicji, wpływu na pracę czujnika, a także sposobów na optymalizację tych czynników.
Czym są dokładność i rozdzielczość?
W kontekście pomiarów elektronicznych słowo „dokładność” oznacza stopień zgodności pomiędzy wynikiem pomiaru, a wartością prawdziwą. Czujniki o wysokiej dokładności prezentują więc odczyt, który jest bardzo zbliżony do wartości rzeczywistej. W przypadku sensorów pozycji mamy na myśli różnicę pomiędzy położeniem zmierzonym a rzeczywistym.
Czym innym jest rozdzielczość. To pojęcie definiuje jak małą zmianę sygnału jest w stanie zarejestrować czujnik. W przypadku sensorów magnetycznych chodzi oczywiście o minimalną zmianę kąta położenia (inaczej minimalne przesunięcie).
Warto zaznaczyć, że wysoka rozdzielczość nie musi oznaczać wysokiej dokładności. Sensor może być czuły na niewielkie zmiany wartości, ale przy niskiej dokładności zmierzona wartość będzie daleka od rzeczywistej. Może zajść też odwrotna sytuacja – pomiar może być dokładny, ale za sprawą niewielkiej rozdzielczości sensor nie będzie w stanie wykryć subtelnych zmian mierzonego parametru.
Ten paradoks obrazuje trudności w projektowaniu i implementacji aplikacji magnetycznych sensorów ruchu. Inżynierowie powinni zadbać o równowagę pomiędzy odpowiednią rozdzielczością a dokładnością, by optymalnie dobrać parametry czujnika, zgodnie z wymaganiami konkretnej aplikacji.
Optymalizacja parametrów czujnika
Aby zoptymalizować pracę sensora magnetycznego należy zrozumieć, w jaki sposób dokładność i rozdzielczość wpływają na wynik pomiaru. Ponadto warto wiedzieć, które parametry systemu można poprawić, aby wpłynąć na jakość pomiaru, a także w jaki sposób opisywane są one w dokumentacjach.
Zazwyczaj poprawienie jakiegoś parametru wiąże się z pewnym kosztem i nie inaczej jest w tym przypadku. Osiągnięcie równowagi pomiędzy dokładnością i rozdzielczością wymaga dokładnego przeanalizowania kilku wyborów projektowych.
Jednym z czynników wpływających na rozdzielczość jest minimalizacja szumu. Można to osiągnąć poprzez zastosowanie na wyjściu filtra uśredniającego. Pozwala on wygładzić fluktuacje na wyjściu sensora, a więc otrzymać bardziej spójne i dokładne wyniki.
Z drugiej strony taki filtr zmniejsza zakres dynamiki systemu, co oznacza, że system będzie reagował na szybkie zmiany z pewnym opóźnieniem, proporcjonalnym do utraty pasma. Jeśli okno filtra jest zbyt szerokie, to może to doprowadzić do pogorszenia reakcji i stabilności pętli sterującej serwomechanizmu. Dla czujników Halla przybliżona zasada jest następująca – należy założyć, że każde dodatkowe pół bitu rozdzielczości wymaga poświęcenia połowy zakresu dynamiki.
Wzrost dokładności (lub inaczej – zmniejszenie nieliniowości systemu) można osiągnąć poprzez kalibrację. Kalibracja odczytu sensora po jego zamontowaniu pozwala w dużym stopniu przeciwdziałać niedokładnościom mechanicznego wykonania elementów oraz nieidealnościom samego magnesu. Po przeprowadzeniu prawidłowej kalibracji jedynym znaczącym czynnikiem wpływającym na nieliniowość jest dryft temperaturowy. Jednak w zamian zwiększa się koszt systemu, ponieważ proces kalibracji wymaga czasu, zasobów oraz specjalistycznej wiedzy. Z tego powodu nie dla wszystkich systemów będzie to najlepsza opcja, szczególnie jeśli kluczowym czynnikiem jest koszt.
Natomiast w sytuacjach, gdy wymagany jest szeroki zakres dynamiki lub wyjątkowo niski poziom nieliniowości (na przykład 0,1°), można zastosować specjalne rozwiązanie, takie jak układ MA600 firmy Monolithic Power Systems. Oferuje on świetny kompromis pomiędzy kosztem a jakością produktu. Ma szerszy zakres dynamiki niż czujniki oparte o efekt Halla, ale jednocześnie jest znacząco tańszy niż bardziej zaawansowane enkodery optyczne. MA600 jest oparty o technologię tunelowej magnetorezystancji (TMR), co sprawia, że ma niższy poziom szumów niż czujniki Halla, a na dodatek charakterystyka szumów nie jest gaussowska. To sprawia, że kompromis pomiędzy pasmem a rozdzielczością jest o wiele bardziej korzystny.
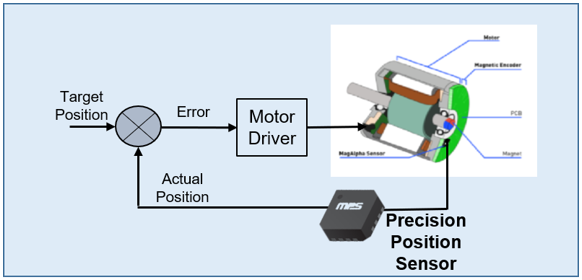
Rys. 1. Rozwiązanie z czujnikiem MA600
Jak określić dokładność i rozdzielczość rozwiązania
Dokumentacje dostarczane przez producentów zawierają informacje nie tylko o rozdzielczości i dokładności układów, ale również o innych kluczowych parametrach, takich jak temperatura pracy, zakres napięć zasilania, prąd spoczynkowy, czy zakres obsługiwanego natężenia pola magnetycznego. Nie wszystkie dokumentacje i parametry są jednak mierzone jednakowo. Należy więc zachować ostrożność podczas porównywania danych.
Na przykład, niektórzy producenci określają rozdzielczość względem poziomu szumu w zakresie 1σ. To oznacza, że podany minimalny wykrywalny krok jest osiągalny tylko w 68% przypadków. Z kolei na przykład firma MPS podaje rozdzielczość przy poziomie szumów w zakresie 3σ, a więc aż dla 99,7% przypadków. Nie wszyscy producenci są jednak tacy zasadniczy i mogą nie przestrzegać reguły trzech sigm.
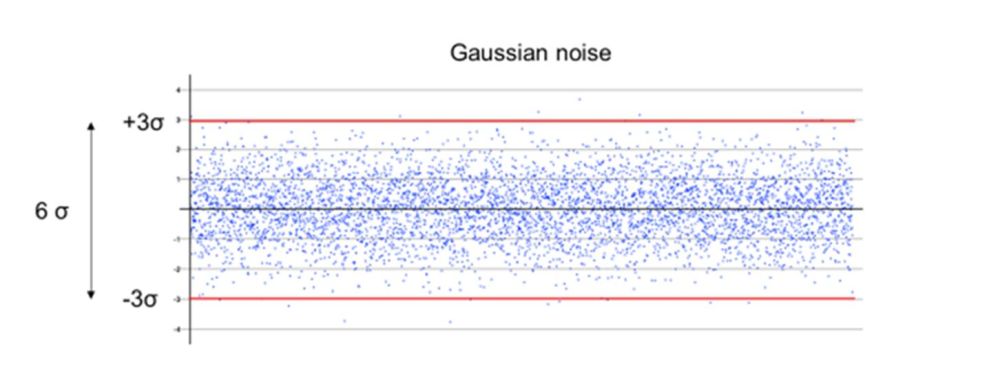
Rys. 2. Poziom szumów w zakresie ±3σ
Jeśli chodzi o dokładność to jest ona lepiej zdefiniowana i jest tam mniej pola do manipulacji. Warto jednak zwrócić uwagę na zakres temperatury, dla którego podano wartość. Jest to bowiem ważny i trudny do wyeliminowania czynnik wpływający na liniowość i dokładność sensora.
Wnioski
Aby dobrać odpowiedni sensor położenia, powinieneś rozumieć zależności pomiędzy dokładnością, rozdzielczością oraz innymi parametrami systemu. Niezbędna jest też wiedza o sposobach optymalizacji tych czynników, co pozwala osiągnąć możliwie najlepszą wydajność systemu.
Dzięki rozumieniu koncepcji dokładności i rozdzielczości w sensorach magnetycznych, takich jak MA600, inżynierowie mogą podejmować bardziej świadome decyzje dotyczące doboru czujnika do konkretnej aplikacji. Mało tego, wiedza to pozwala optymalizować parametry, obniżać koszty oraz zapewnić pomyślną realizację projektów.
We wciąż zmieniającym się świecie technologii, gdzie kluczowe są dokładność i precyzja, zrozumienie niuansów dotyczących czujników pozycji jest nieocenione. Dzięki temu inżynierowie są w stanie lepiej poruszać się w cyfrowym świecie i wykorzystać sensory w szerokiej gamie aplikacji.
Więcej informacji można uzyskać kontaktując się z:
Paweł Pajda
Sales Engineer Active Components – Poland
CODICO Poland
Tel. +48 12 4171083 wew. 21
Mob. +48 602533063
 Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle
Jak model Industry 5.0 wspiera zrównoważony rozwój w polskim przemyśle  Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników
Daniel Brzeziński z Rochester Electronics opowiada jak skutecznie zarządzać przestrzałością w branży półprzewodników  AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii
AI podważa zasady, które rządziły branżą przez dekady. Moc obliczeniowa staje się nową walutą technologii 






