





[RAQ] Analiza zasilaczy impulsowych i prostowników: przekroczenia parametrów cewki indukcyjnej
Pytanie
Dlaczego mój zasilacz piszczy i przegrzewa się?
Odpowiedź
Nieprawidłowy dobór cewki indukcyjnej i przekroczenie określonej dla niej wartości znamionowej prądu nasycenia może powodować wiele różnych problemów w przetwornicach DC-DC. Są to m.in.: przegrzewanie i słyszalne piski.
Streszczenie
Niniejszy artykuł jest pierwszym z serii, w której zostaną omówione typowe błędy projektowe zasilaczy impulsowych (SMPS – Switch-Mode Power Supply), a także ich odpowiednia naprawa. Celem jest zwrócenie uwago na komplikacje, które pojawiają się przy projektowaniu stopnia mocy przetwornic DC-DC, przy czym w artykule skoncentrujemy się na cewce indukcyjnej.
Projektanci wybierają cewki indukcyjne o wartościach spoza zalecanego zakresu w celu uzyskania różnych korzyści, takich jak mniejsze tętnienia wyjściowe i minimalizacja powierzchni zajmowanej przez ten element na PCB. Wybór komponentów o zbyt dużych lub zbyt małych wartościach spowoduje jednak niezamierzone konsekwencje, które mogą doprowadzić do poważnego uszkodzenia układu scalonego, a także zmniejszenia wydajności przetwornicy. W artykule zbadamy również, co się dzieje, gdy nie zostaną podjęte odpowiednie działania upewniające nas, że prąd obciążenia nie przekracza maksymalnej wartości nasycenia cewki indukcyjnej.
Czym jest zasilacz impulsowy?
Zasilacz impulsowy to stabilizator o dużej wydajności, który obniża napięcie wejściowe (przetwornica obniżająca – buck), podwyższa napięcie wejściowe (przetwornica podwyższająca – boost) lub może pełnić obie te funkcje (przetwornica obniżająco-podwyższająca – buck-boost). Podstawowe topologie przetwornic zostały pokazane na rys. 1.
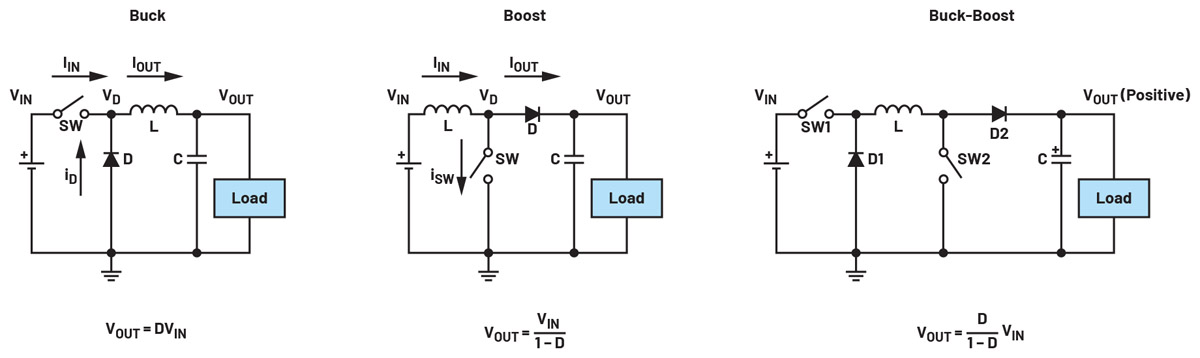
Rys. 1. Typowe topologie SMPS i wyrażenia matematyczne opisujące ich napięcie wyjściowe
Zasada działania każdego SMPS-a polega na magazynowaniu energii w cewce indukcyjnej i wykorzystaniu technik modulacji szerokości impulsu (PWM) w celu uzyskania pożądanego napięcia wyjściowego. Działanie przetwornic opiera się na drugim Prawie Kirchhoffa dotyczącym bilansu napięć w obwodzie elektrycznym. Na podstawie tego prawa można wyciągnąć wniosek, że podczas pracy przetwornicy w stanie ustalonym, w jednym okresie średni prąd cewki indukcyjnej musi wynosić zero. Oznacza to, że cewka indukcyjna musi rozładować cały prąd zmagazynowany w fazie ładowania przed rozpoczęciem kolejnego okresu.
Zasada działania przetwornic obniżających napięcie (buck)
W artykule skoncentrujemy się tylko na przetwornicach buck, co pozwoli przedstawić typowe błędy projektowe. Na stopień mocy przetwornicy buck składają się cztery elementy: cewka indukcyjna, kondensator wyjściowy, górny tranzystor FET reprezentowany przez przełącznik i dolny tranzystor FET, który jest reprezentowany przez diodę (rys. 2).
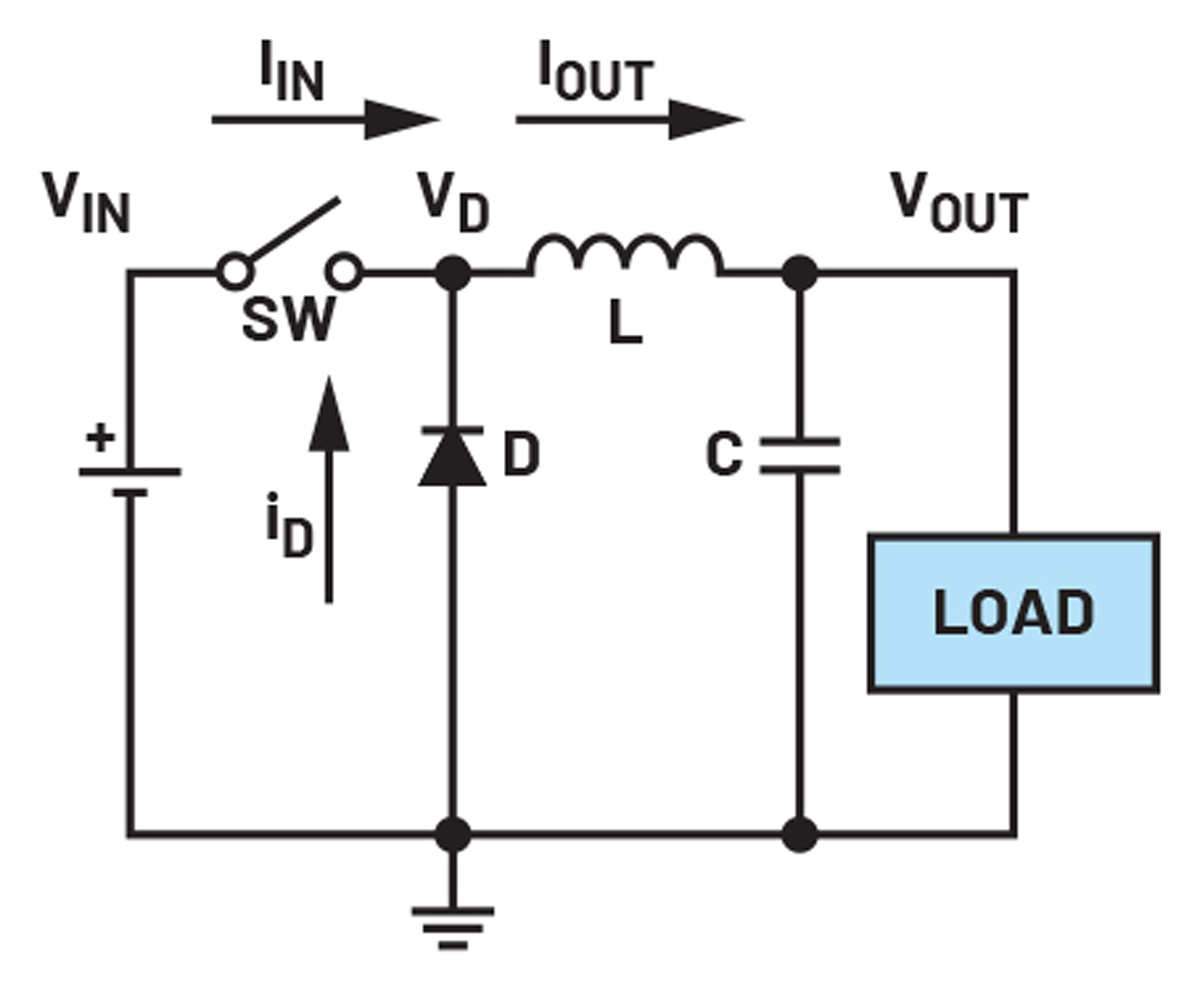
Rys. 2. Uproszczony stopień mocy przetwornicy buck
Napięcie na cewce indukcyjnej jest określone wyrażeniem: VL = L diL/dt. Napięcie to wynika z różnicy między węzłem przełącznika a napięciem wyjściowym. Gdy górny tranzystor FET jest włączony, VL jest równe różnicy między napięciem wejściowym a napięciem wyjściowym. Gdy górny tranzystor FET jest wyłączony, różnica ta wynosi 0 V minus napięcie wyjściowe, ponieważ węzeł przełącznika jest uziemiony. diL/dt (lub ∆iL) to zmiana prądu cewki indukcyjnej w czasie, powszechnie określana jako tętnienie prądu cewki indukcyjnej. Gdy górny tranzystor FET jest włączony (a dolny tranzystor FET jest wyłączony), cewka indukcyjna magazynuje energię w postaci strumienia magnetycznego wraz ze wzrostem płynącego przez nią prądu. Gdy górny tranzystor FET jest wyłączony (rozwarty), a pole magnetyczne zanika, dolny tranzystor FET tworzy ścieżkę do masy, umożliwiając przepływ w miarę zmniejszającego się prądu do obciążenia. Można to zaobserwować w przebiegu prądu cewki indukcyjnej pokazanym na rys. 3. Kondensator wyjściowy służy do wygładzania tętnień wyjściowych i pomaga utrzymać pożądane napięcie wyjściowe.
Napięcie wyjściowe przetwornicy obniżającej jest określone wyrażeniem VOUT = DVIN, gdzie D jest cyklem pracy i jest definiowane jako procent czasu, w którym górny FET jest włączony i ładuje cewkę indukcyjną w odniesieniu do całkowitego okresu pracy przetwornicy.
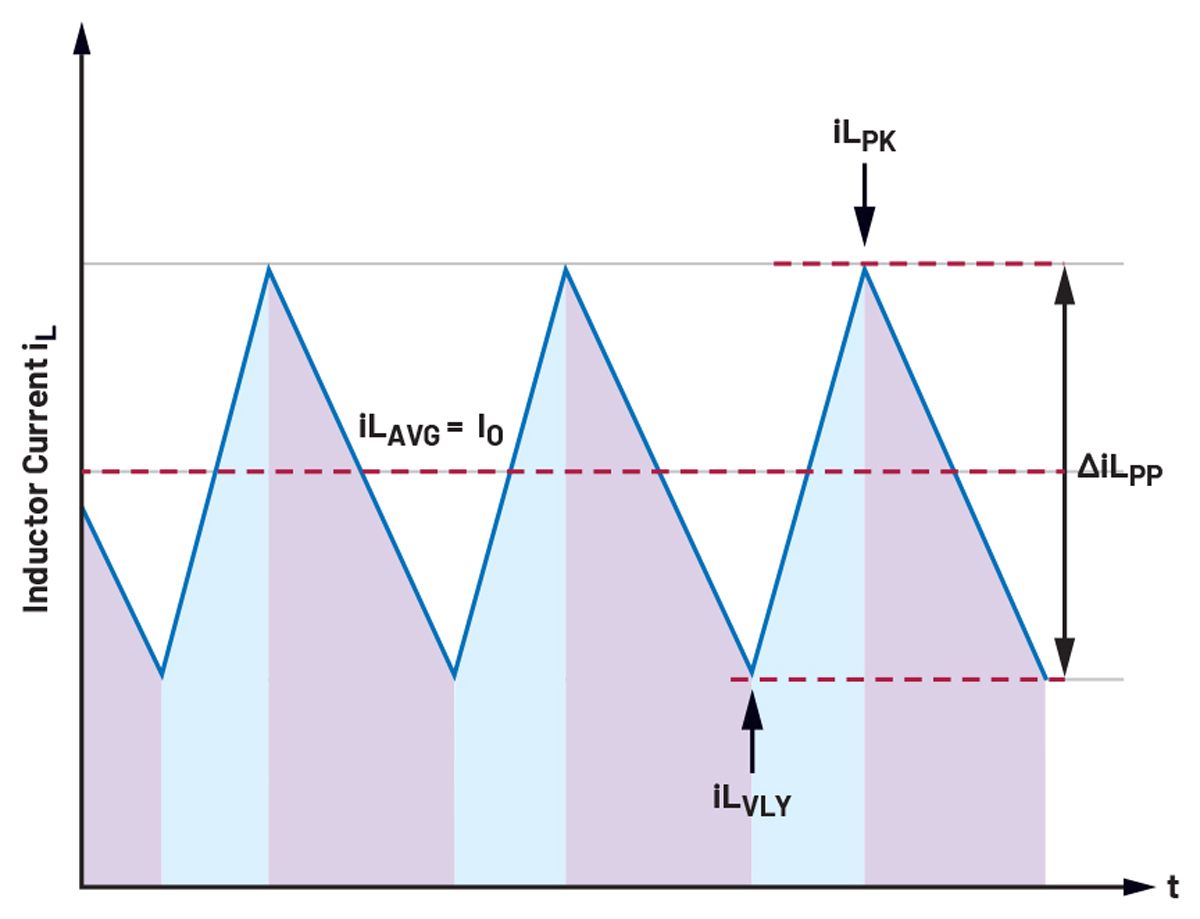
Rys. 3. Przebieg prądu cewki indukcyjnej. Prąd płynący przez cewkę indukcyjną ładuje ją, gdy górny tranzystor FET jest włączony i rozładowuje, gdy górny tranzystor FET jest wyłączony.
Zalecana indukcyjność cewki
Podczas projektowania zasilacza SMPS należy wybrać odpowiednią indukcyjność cewki tak, aby zapewnić akceptowalne tętnienie płynącego przez nią prądu (∆iL). Zaleca się,, aby tętnienia cewki indukcyjnej wynosiły od 30% do 40% prądu obciążenia przyjętego dla przetwornic buck. Zakres ten jest uważany za optymalny, ponieważ jest wystarczająco duży, aby przechwycić i dostarczyć dokładny sygnał do układu sprzężenia zwrotnego sterowania trybem prądowym, ale nie za duży, aby zasilacz przeszedł w tryb nieciągłego przewodzenia (DCM – Discontinuous Conduction Mode). DCM to stan, w którym tętnienie prądu jest zbyt duże, więc aby utrzymać prąd obciążenia na żądanej wartości konieczne jest zmniejszenie prądu poniżej 0 A. Jednak po osiągnięciu wartości 0 A wewnętrzna dioda tranzystora FET nie przewodzi już prądu, zapobiegając jego spadkowi poniżej 0 A. Przy doborze odpowiedniej cewki można skorzystać z ogólnego wyrażenia:

Z tego wzoru wynika, że częstotliwość przełączania i indukcyjność są odwrotnie proporcjonalne. Oznacza to, że przy wyższych częstotliwościach czas ładowania ulega skróceniu, umożliwiając prawidłowe działanie z mniejszą cewką indukcyjną. Oszczędzamy przy tym rozmiar i koszt.
Nasycenie cewki indukcyjnej
Jednym z najczęstszych i najbardziej katastrofalnych błędów w projektowaniu zasilaczy impulsowych jest pomijanie znamionowego prądu nasycenia cewki przy jej wyborze. Przepływ takiego prądu przez cewkę powoduje, że rdzeń nasyca się, a to oznacza, że generowane pole magnetyczne nie będzie już rosło proporcjonalnie do pobieranego prądu. Powoduje to zakłócenie drugiego prawa Kirchhoffa, prowadząc do utraty liniowej charakterystyki zarówno tętnienia prądu cewki indukcyjnej, jak i tętnienia napięcia wyjściowego. Gdy rdzeń nasyci się, cewka szybko traci indukcyjność, zachowując się bardziej jak rezystor niż cewka indukcyjna.
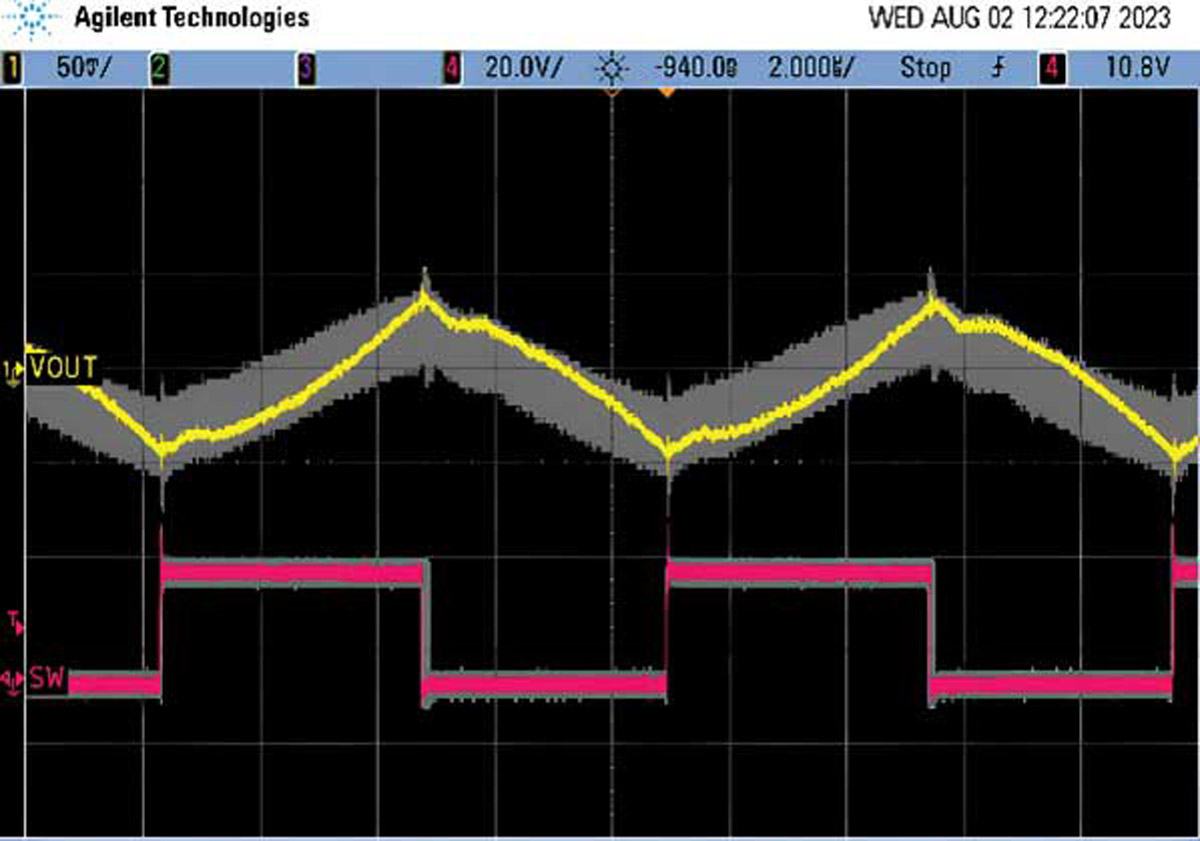
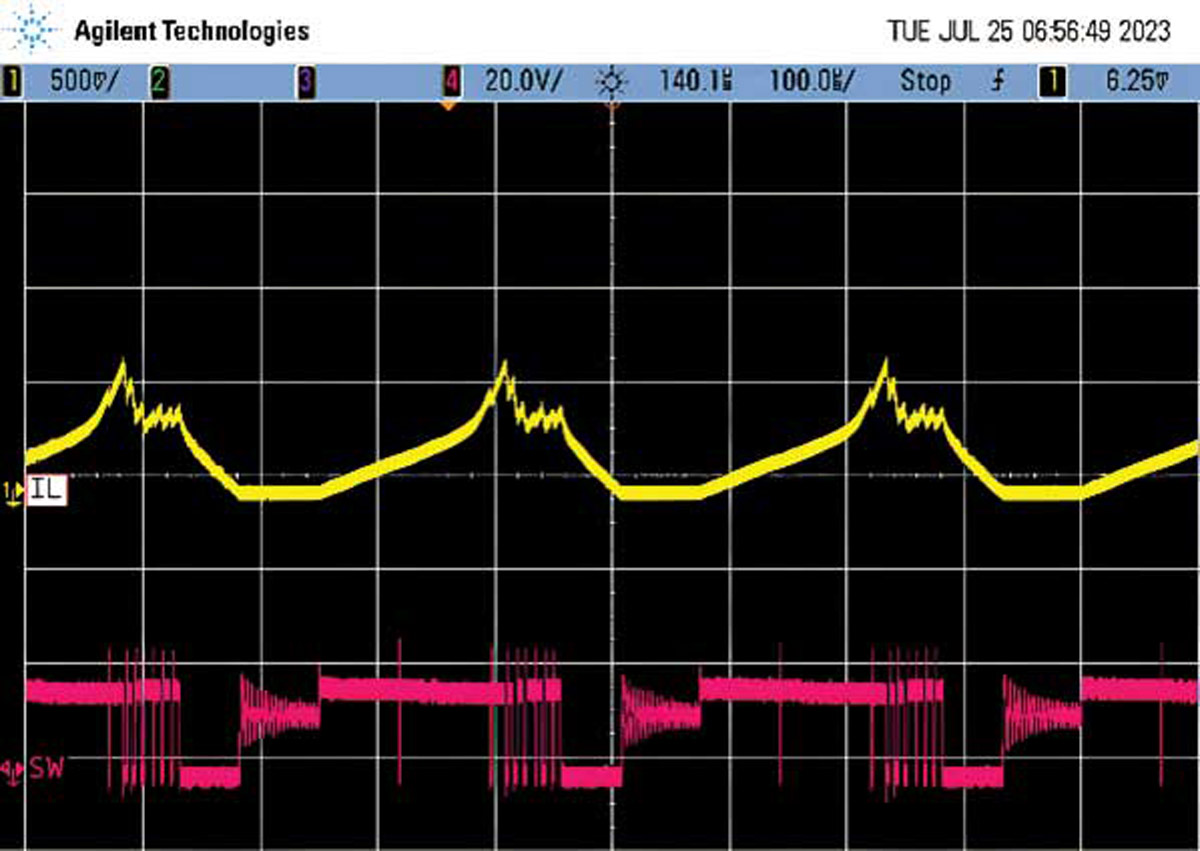
Wzrost efektywnej rezystancji szeregowej (ESR) cewki indukcyjnej i praktyczne zmniejszenie jej indukcyjności powoduje zwiększenie prądu wynikające z II prawem Kirchhoffa, mówiącego o zachowaniu równowagi napięć w oczku obwodu. Wartość szczytowa obserwowana w przebiegu prądu nasycone cewki wynika z wykładniczego wzrostu nachylenia prądu i można ją zobaczyć na rys. 4. Występowanie szczytów prądu odbija się w napięciu wyjściowym, prowadząc do zwiększenia szumów i tętnień napięcia, co widać na rys. 5. Szumy i tętnienia napięcia mogą potencjalnie uszkodzić dalsze elementy, jeśli napięcie wzrośnie zbyt mocno i przekroczy maksymalne napięcie znamionowe jakiegoś dalszego elementu. Mogą ponadto pogorszyć się parametry EMI.
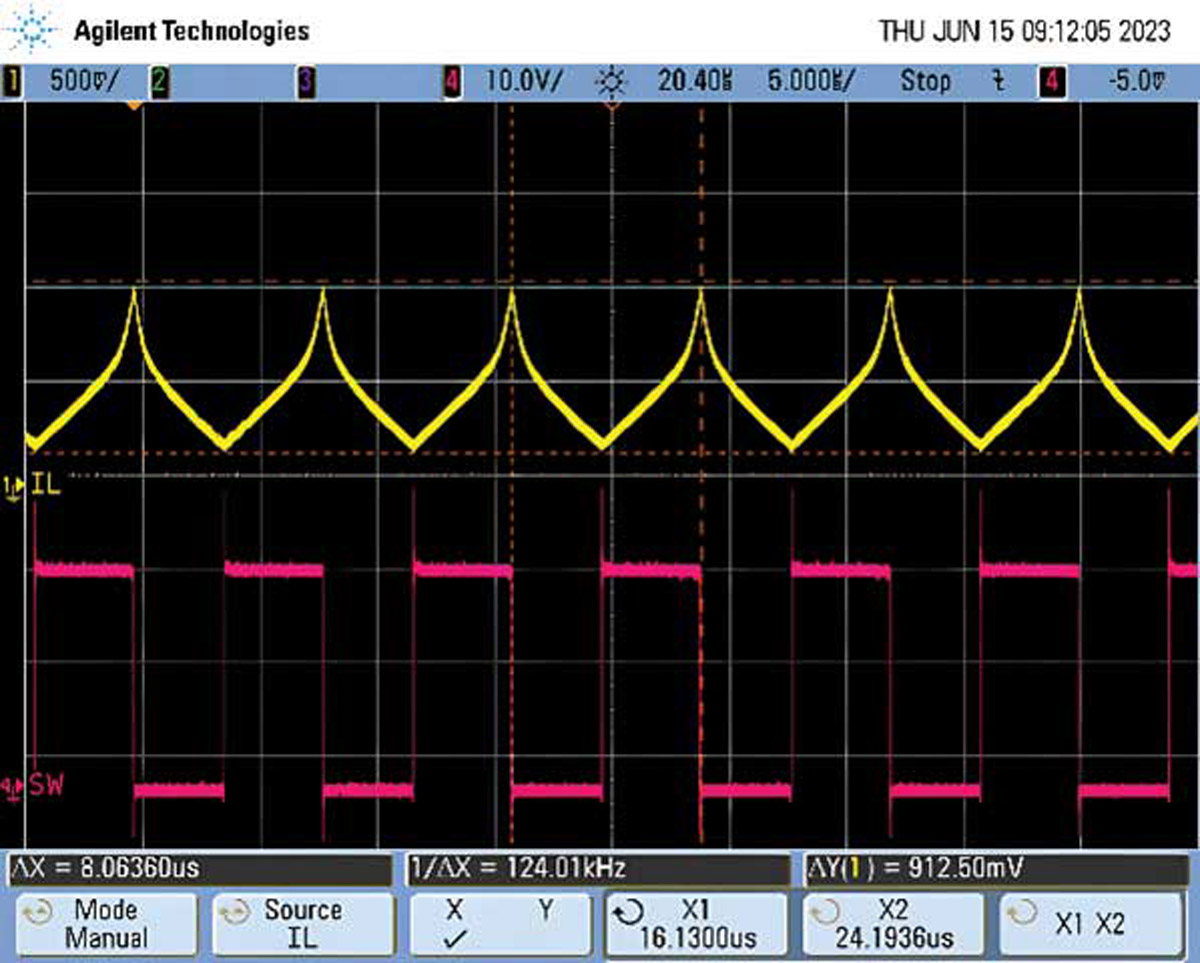
Rys. 4. Przebieg prądu nasyconej cewki indukcyjnej. Przebieg zachowuje się normalnie, dopóki prąd nie przekroczy wartości znamionowej nasycenia
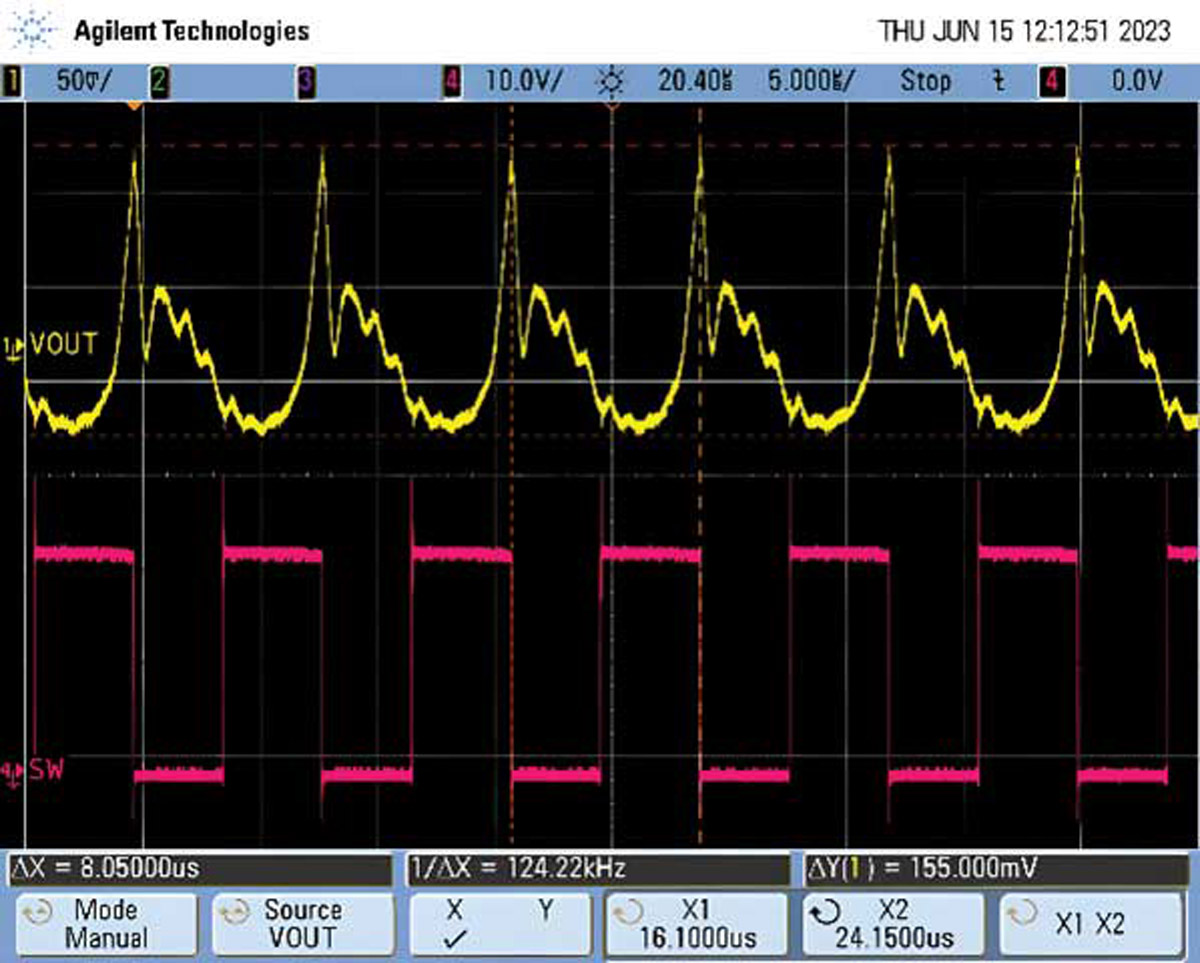
Rys. 5. Tętnienia wyjściowe nasyconej cewki indukcyjnej. Wartość szczytowa jest przenoszona na napięcie wyjściowe, które zawiera szumy i tętnienia
Ponadto, przy dużych wahaniach prądu, w cewce indukcyjnej obserwujemy szybką utratę histerezy. Prowadzi to do nadmiernego rozpraszania ciepła przez cewkę, co można zaobserwować na rys. 6. Słyszalny ponadto staje się szum. Nadmiar ciepła może uszkodzić inne pobliskie elementy, zwłaszcza sam układ przetwornicy.

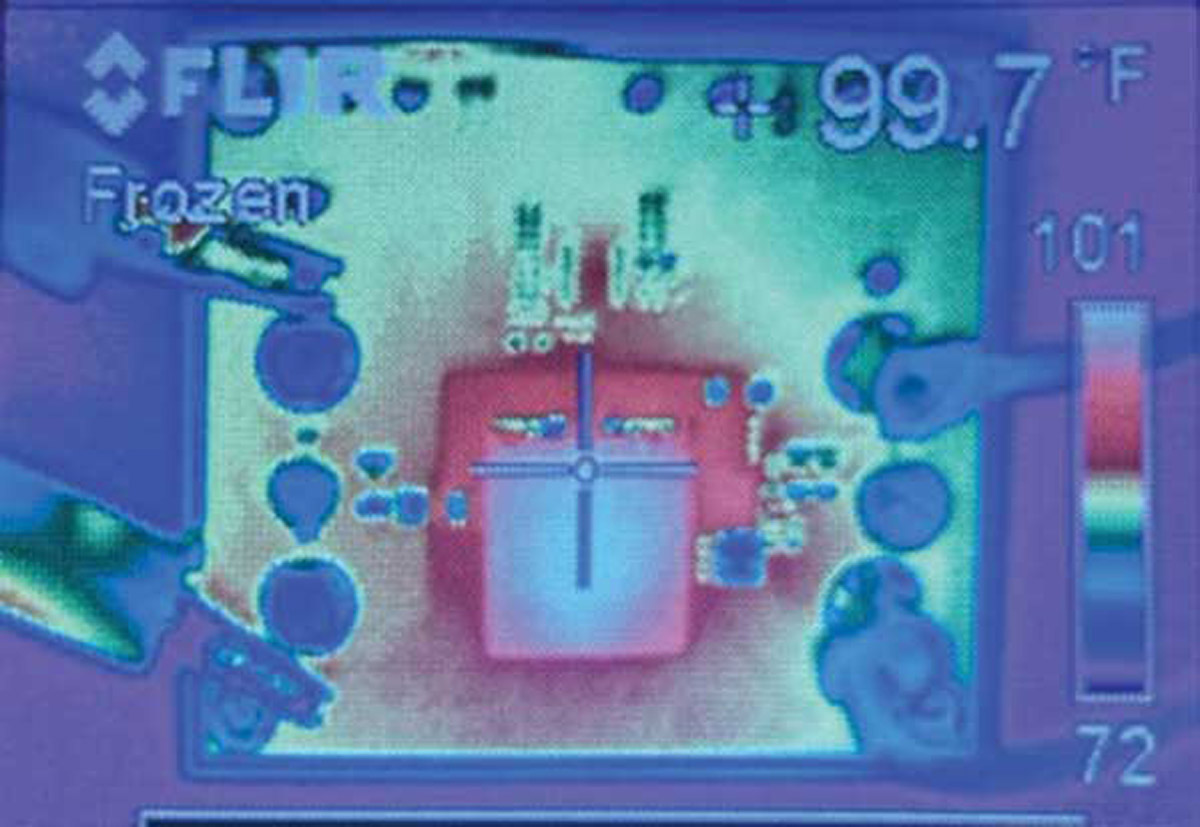
Rys. 6. Rozpraszanie ciepła nasyconej cewki indukcyjnej powoduje osiągnięcie temperatury 226°F (107,78°C)
Aby uniknąć tego problemu, projektanci powinni wybierać cewki indukcyjne o prądzie znamionowym co najmniej dwa razy większym niż oczekiwany prąd maksymalny. Przy obliczaniu maksymalnego prądu ważne jest uwzględnienie tętnienia prądu cewki indukcyjnej, a także prądu obciążenia pobieranego z wyjścia. Ponadto projektanci mogą sprawdzić w arkuszu danych wybranej cewki, przy jakim prądzie indukcyjność spada o 10% do 30% pierwotnej wartości. Taki spadek jest definiowany jako nasycenie. Wybór cewki indukcyjnej o odpowiednim znamionowym prądzie nasycenia spowoduje normalne działanie systemu. Widać to na podstawie liniowego prądu przepływającego przez cewkę indukcyjną na rys. 7. Tętnienia napięcia wyjściowego znikną, jak widać na rys. 8. Wreszcie, system będzie działał w znacznie niższej temperaturze, jak to przedstawiono na rys. 9, mniej obciążając układ przetwornicy i poprawiając jego żywotność.
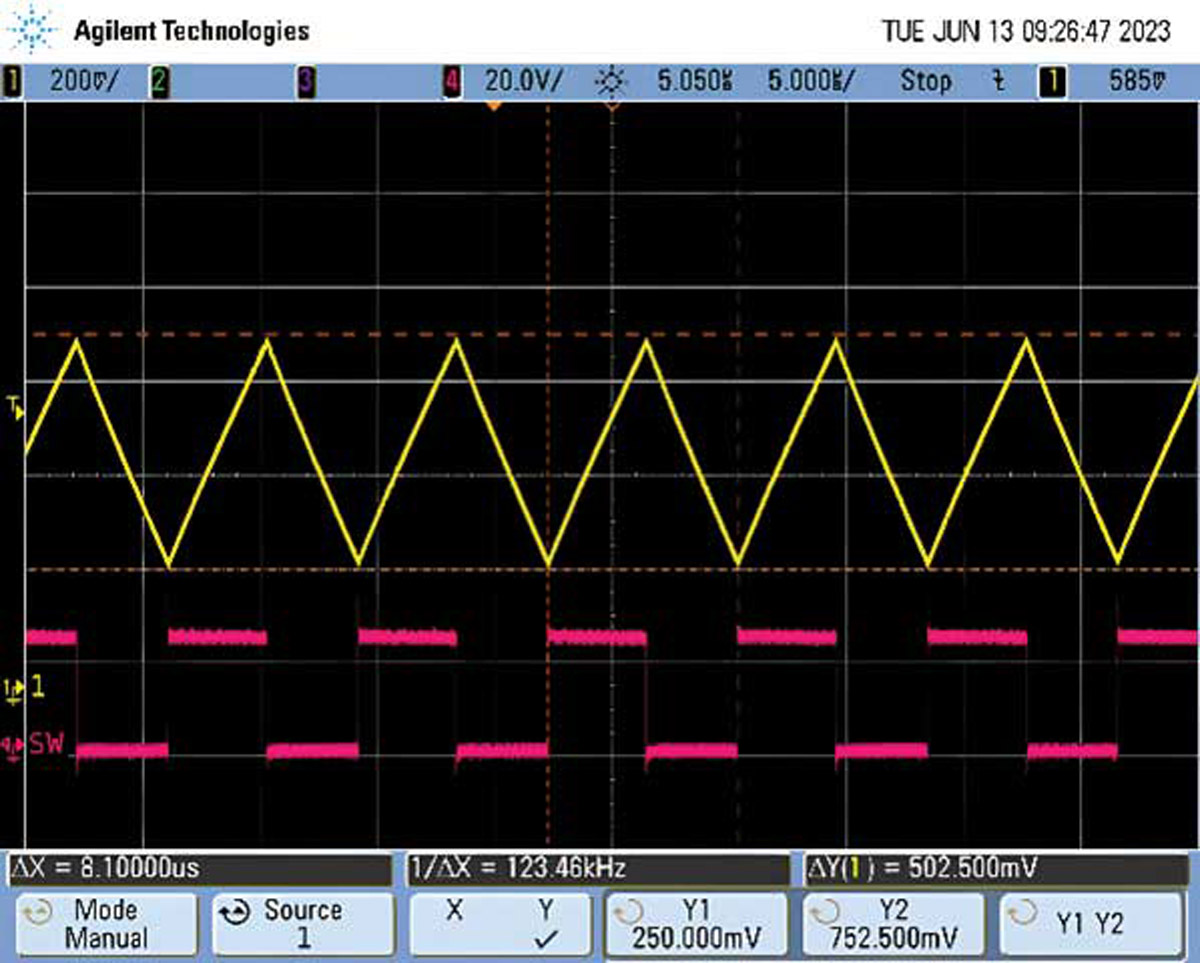
Rys. 7. Nominalny przebieg prądu cewki indukcyjnej
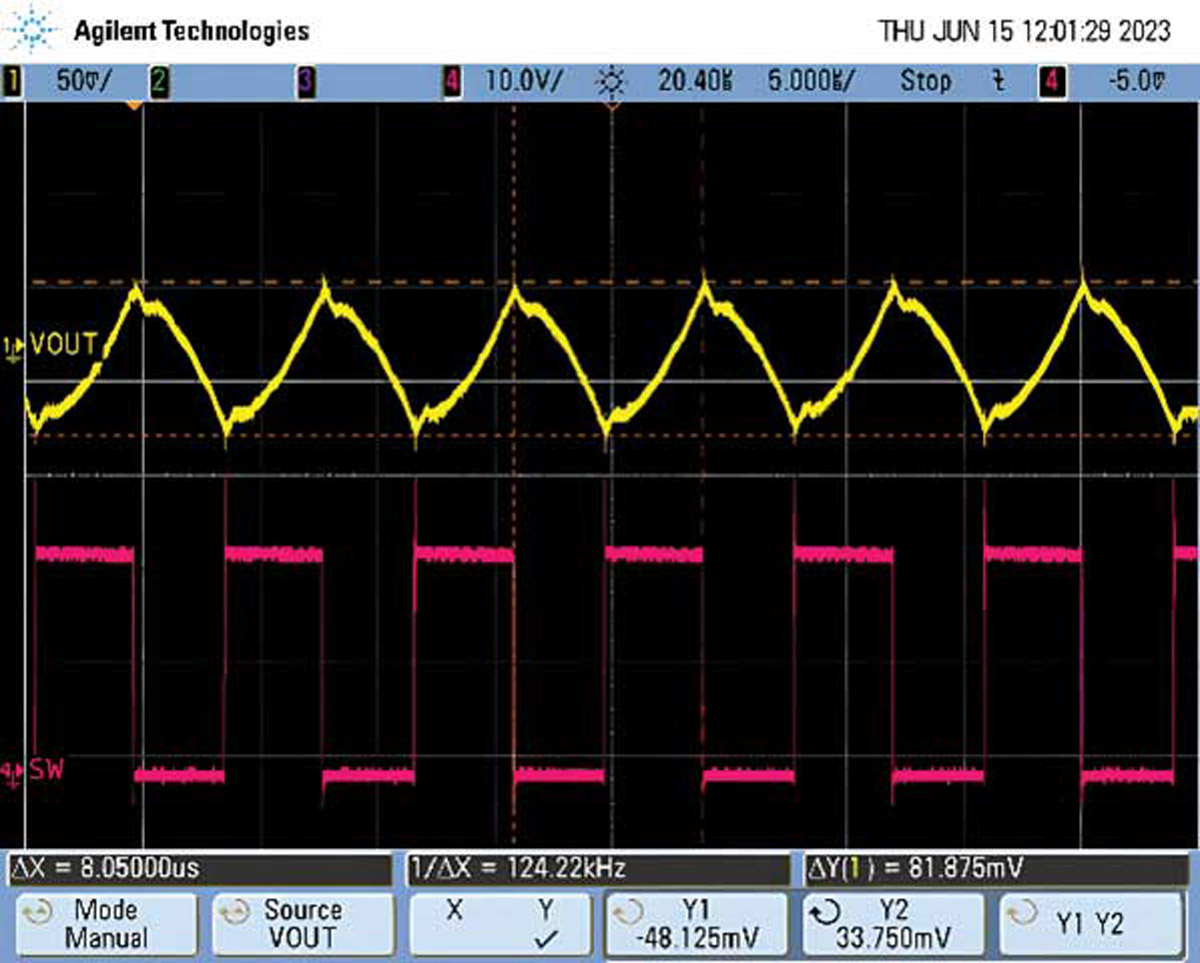
Rys. 8. Nominalne tętnienia wyjściowe cewki indukcyjnej
Rys. 9. Przy nominalnym rozpraszaniu ciepła cewka osiąga temperaturę 37,61°C (99,7°F)
Komplikacje związane z cewką indukcyjną o zaniżonych parametrach
Aby zaoszczędzić miejsce na PCB projektanci często preferują mniejsze cewki indukcyjne. Cewki o mniejszej indukcyjności mają zazwyczaj również mniejsze wymiary fizyczne, gdyż są nawijane mniejszą liczbą zwojów. Jeśli jednak cewka indukcyjna jest zbyt mała, prąd tętnienia będzie duży i zmusi przetwornicę do przejścia w tryb DCM. Jest to jednak sytuacja niepożądana w przypadku zasilaczy impulsowych. W takim trybie urządzenie będzie mniej wydajne i będzie wykazywać gorsze parametry związane z zakłóceniami elektromagnetycznymi (EMI). Pogorszona wydajność EMI może objawiać się jako dzwonienie w węźle przełącznika, spowodowane przez parametry pasożytnicze, a także układ LC (tworzący obwód rezonansowy). Efekty te można zobaczyć na rys. 10. Dzwonienie to przenosi się na napięcie wyjściowe, prowadząc do większego tętnienia i większej liczby skoków napięcia, jak widać na rys. 11. Co więcej, zasilacz nie jest już w trybie ciągłego przewodzenia (CCM), a wyprowadzone wzory wyjściowe dla SMPS nie mają już zastosowania.
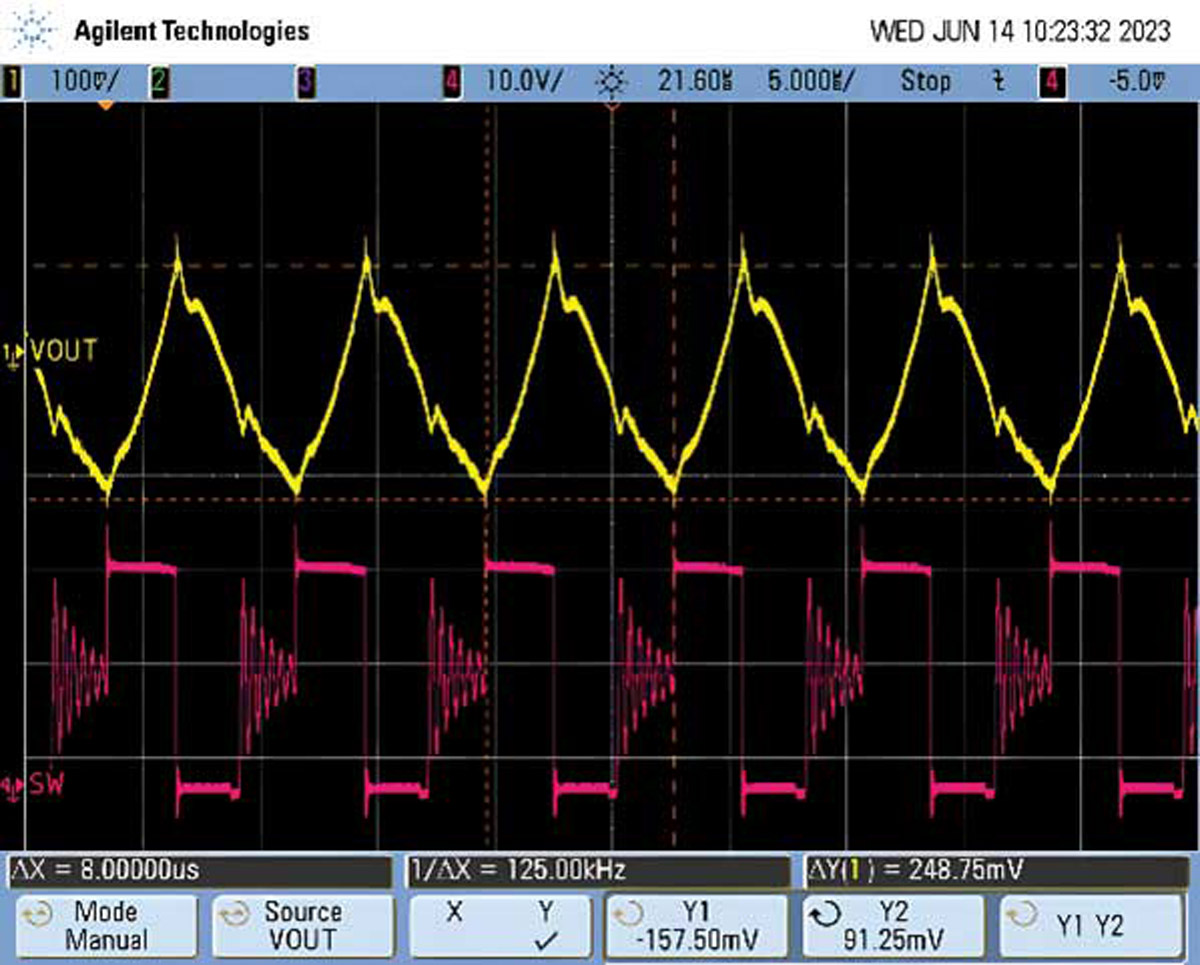
Rys. 10. Przebieg wyjściowy dla układu z zaniżonymi parametrami cewki. Dzwonienie można również zaobserwować w węźle przełącznika, jeśli prąd cewki indukcyjnej jest niedostępny
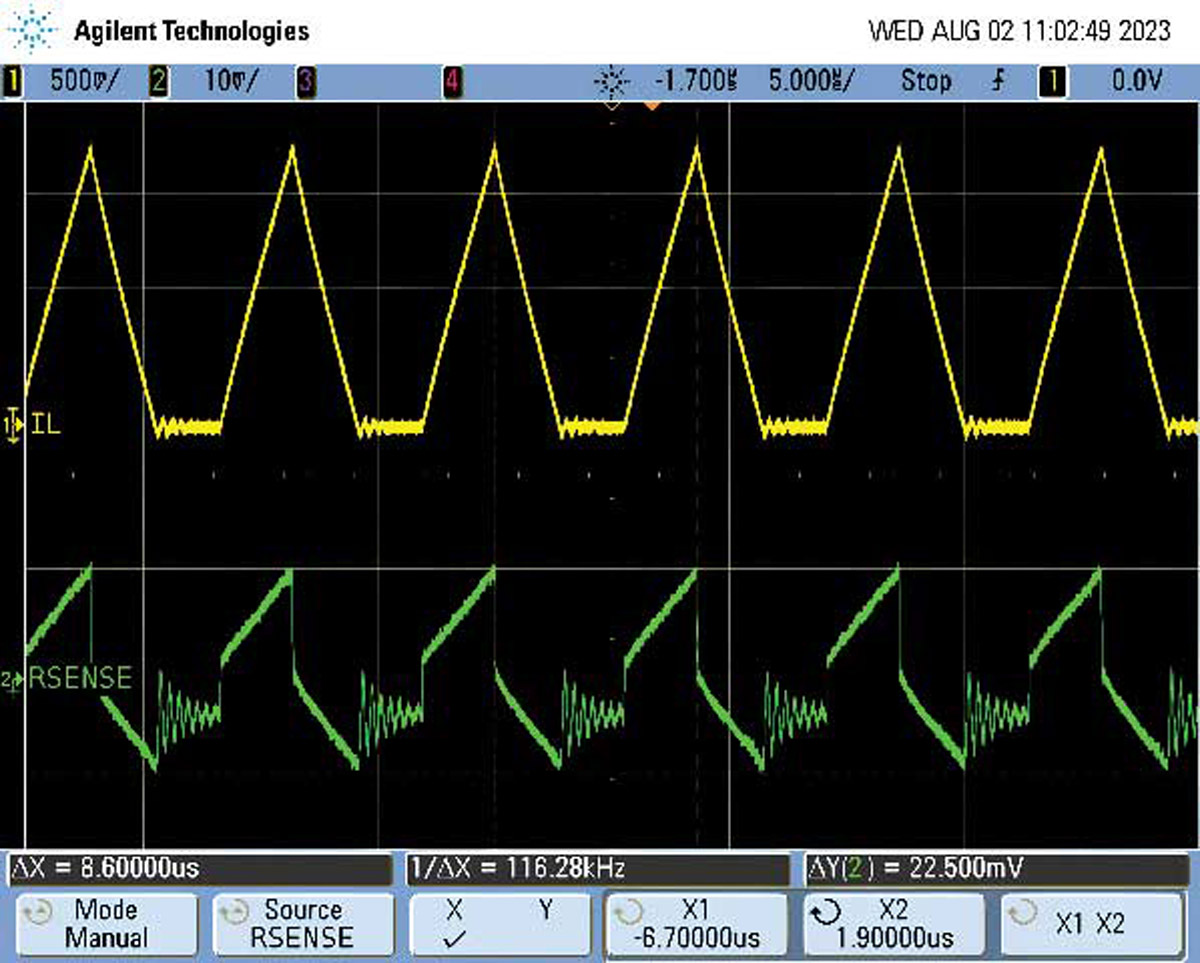
Rys. 11. Przebieg prądu w cewce indukcyjnej o zaniżonych parametrach. Dzwonienie widoczne w prądzie i RSENSE wskazuje, że zasilacz jest w trybie DCM
Aby rozwiązać ten problem, projektanci powinni wybrać cewkę indukcyjną, która zapewni tętnienie prądu od około 30% do 40%. Zmniejszy to tętnienia prądu cewki indukcyjnej i przywróci urządzenie do trybu CCM z trybu DCM, jak widać na rys. 12. Wpłynie to również korzystnie na tętnienia napięcia wyjściowego i usunie szpilki napięciowe, co widać na rys. 8. Jeśli projektant ma problemy z obliczeniem pożądanej indukcyjności cewki i wyborem odpowiedniego elementu, może skorzystać z programu LTPowerCAD. Będzie on bardzo pomocny w projektowaniu i wyborze elementów stopnia mocy.
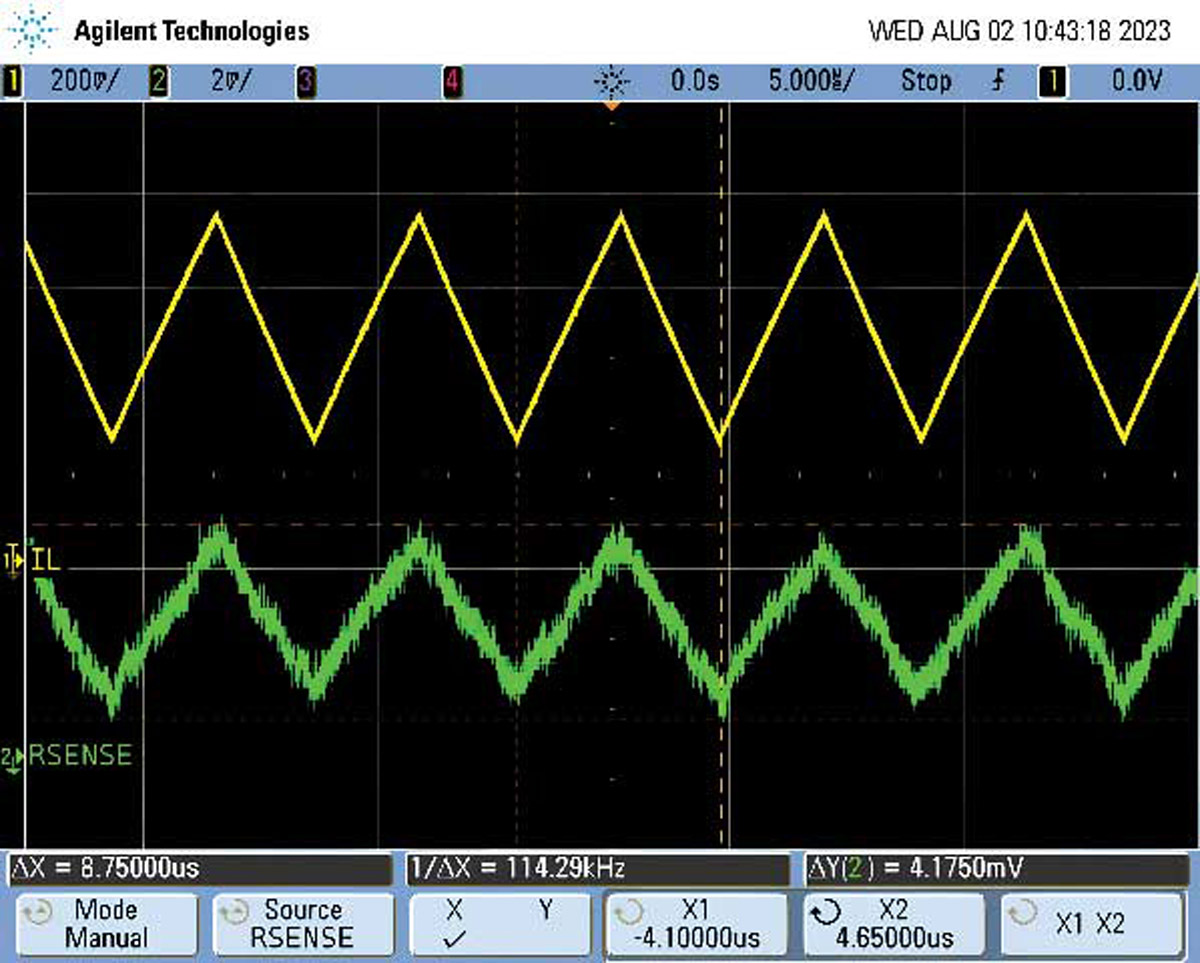
Rys. 12. Nominalny przebieg prądu cewki indukcyjnej
Komplikacje związane z cewką indukcyjną o parametrach wyższych niż znamionowe
Układy elektroniczne podłączone do zasilacza SMPS mają zazwyczaj określone napięcia zasilania z powiązaną tolerancją. Jeśli tętnienie na szynie napięcia jest zbyt duże, drastycznie wpłynie to na działanie systemu. Na przykład, jeśli mikrokontroler ma specyfikację zasilania 3,3 V ±50 mV, tętnienie większe niż ±50 mV może spowodować wyłączenie tego układu. Jednym ze sposobów stosowanych przez projektantów, którzy często próbują złagodzić te tętnienia, jest zwiększenie rozmiaru cewki indukcyjnej. Jeśli jednak jest ona zbyt duża, tętnienie prądu znacznie spada wraz z tętnieniem napięcia wyjściowego. Choć taki efekt można uznać za pożądany, to prowadzi on do problemów z układem sprzężenia zwrotnego, a także może skutkować znacznie wolniejszą odpowiedzią impulsową. Niewielkie tętnienia sprawią, że będą one bardzo trudne do wykrycia przez szeregowy rezystor bocznikowy, który będzie zniekształcał zwykły przebieg trójkątny przekazywany do pętli sprzężenia zwrotnego. Gdy tętnienie prądu cewki indukcyjnej jest małe, pogarsza się stosunek sygnału do szumu (SNR). Powoduje to, że pętla sprzężenia zwrotnego rejestruje szum jako sygnał z cewki indukcyjnej, a to skutkuje niepożądaną niestabilnością na wyjściu. Objawia się ona jako jitter pokazany na rys. 13.
Rys. 13. Jitter spowodowany niestabilnością na wyjściu. Przebieg pokazany za pomocą funkcji persist to napięcie wyjściowe cewki indukcyjnej o zawyżonych parametrach. Podświetlony przebieg jest zarejestrowany z nominalną cewką indukcyjną.
Ponadto, w przypadku cewek o zawyżonej indukcyjności, znamionowy prąd nasycenia jest zwykle mniejszy. Może to prowadzić do nasycenia cewki indukcyjnej, które jest niebezpieczne dla układu przetwornicy, jak omówiono w sekcji „Nasycenie cewki indukcyjnej”. Efekt nasycenia bardzo przewymiarowanej cewki indukcyjnej można zobaczyć na rys. 14.
Rys. 14. Przebieg wyjściowy nasyconej cewki indukcyjnej, która ma 22 razy większą indukcyjność od wartości nominalnej. Prąd znamionowy nie wzrasta proporcjonalnie do indukcyjności.
Aby złagodzić ten problem, projektanci muszą pamiętać, że tętnienia napięcia wyjściowego można kontrolować poprzez zmianę wybranych kondensatorów wyjściowych. Zwiększając pojemność kondensatora wyjściowego lub zmniejszając jego ESR, można zmniejszyć tętnienia napięcia wyjściowego bez konieczności zwiększania indukcyjności cewki. Pozwoli to na utrzymanie tętnienia prądu cewki na poziomie od 30% do 40%, umożliwiając układowi wykrywania prawidłowe pozyskanie sygnału. Można to zobaczyć na rys. 15.
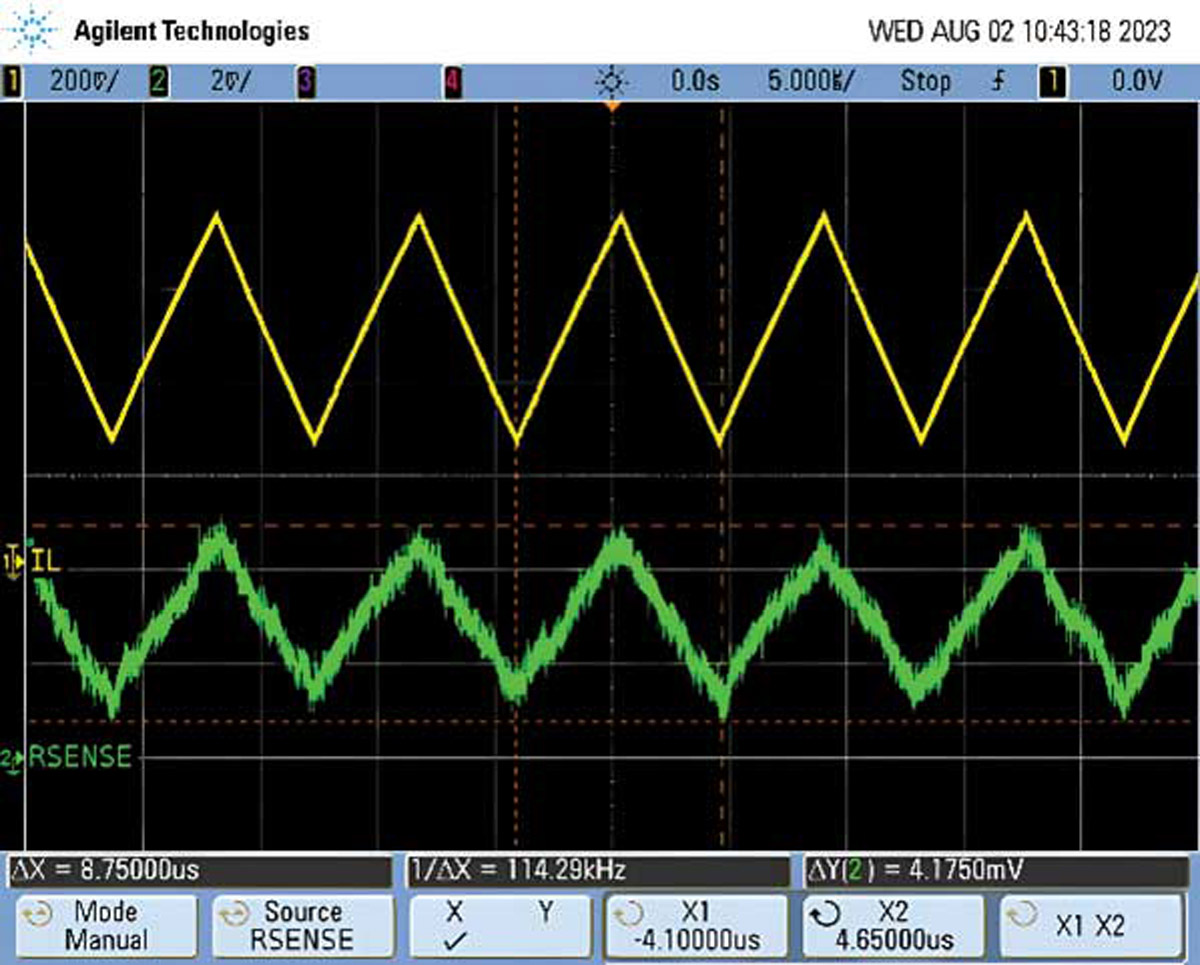
Rys. 15. Nominalne przebiegi napięciowe na rezystorze wykrywającym
Podsumowanie
Niniejszy artykuł pełni funkcję przewodnika do analizy zagadnień związanych z projektowaniem cewek indukcyjnych dla przetwornic obniżających napięcie. Ponadto ma on na celu dostarczenie praktycznych rozwiązań w przypadku, gdy projektanci zauważą którekolwiek z przedstawionych w artykule niepożądanych wyników. Utrzymanie tętnienia cewki indukcyjnej w przedziale od 30% do 40% zakresu wyjściowego poprzez odpowiednie dobranie cewki indukcyjnej ma kluczowe znaczenie dla zapewnienia, że urządzenie pozostanie w trybie CCM i nie spowoduje niepożądanego jittera lub nasycenia. Doprowadzenie do stanu, którym efekty te wystąpią może spowodować nieodwracalne uszkodzenia obciążenia lub samego układu stabilizatora.
Autorzy:
Abe Ibraheim – stażysta ds. aplikacji centralnych a Analog Devices,
Kenneth Armijo – inżynier stowarzyszony w aplikacjach centralnych w Analog Devices,
Piyu Dhaker – inżynier aplikacji w North America Central Applications Group w Analog Devices
 [RAQ] Jak używając transceivera IO-Link do zarządzania łączem danych można uprościć wybór mikrokontrolera?
[RAQ] Jak używając transceivera IO-Link do zarządzania łączem danych można uprościć wybór mikrokontrolera?  [RAQ] Czy można sterować tranzystorami GaNFET za pomocą sterownika DC-DC pierwotnie zaprojektowanego dla krzemowych tranzystorów MOSFET?
[RAQ] Czy można sterować tranzystorami GaNFET za pomocą sterownika DC-DC pierwotnie zaprojektowanego dla krzemowych tranzystorów MOSFET?  [RAQ] Nowoczesne układy zasilania dla inteligentnych czujników
[RAQ] Nowoczesne układy zasilania dla inteligentnych czujników 



