





[RAQ] Jak zmierzyć i określić czas miękkiego startu, gdy nie jest on opisany równaniem? [cz.1]
Pytanie
Jaki wpływ na czas miękkiego startu ma użycie dwuwyjściowej przetwornicy DC-DC jako układu dwufazowego z pojedynczym wyjściem?

Odpowiedź
Jeśli układ ma dwa oddzielne wyprowadzenia miękkiego startu, to każde z nich ma własne źródło prądowe. Mogą być one teraz połączone równolegle w celu zaimplementowania układu z pojedynczym wyjściem. W takim przypadku wypadkowe źródło prądowe ma wydajność zwiększoną 2-krotnie. Przy zastosowaniu takiego samego kondensatora wyjściowego, zależności czasowe będą o połowę krótsze niż pierwotnie. Aby osiągnąć ten sam czas miękkiego startu, pojemność kondensatora musi zostać podwojona.
Streszczenie
Układy scalone zarządzania energią (PMIC) często zawierają wbudowaną funkcję znaną jako miękki start (soft start). Funkcja miękkiego startu występuje głównie w zasilaczach impulsowych, ale można ją również znaleźć w zasilaczach liniowych (LDO). Miękki start jest stosowany w celu ograniczenia prądu rozruchowego podczas uruchamiania urządzenia. Polega to na kontrolowanym, stopniowym zwiększaniu napięcia wyjściowego. Dzięki temu zapobiega się nagłym skokom prądu lub napięcia przy pierwszym włączeniu zasilania. Większość zasilaczy impulsowych posiada funkcję miękkiego startu, która może być regulowana zewnętrznie lub ustalana wewnętrznie. Istnieją przypadki, w których równanie miękkiego startu nie jest podane w danych katalogowych, nawet wtedy, gdy układ scalony obsługuje funkcję miękkiego startu. W dwuczęściowym artykule zostały wyjaśnione różne mechanizmy miękkiego startu, podano też zalecenia dotyczące oceny i pomiaru czasu miękkiego startu, gdy w danych katalogowych nie podano odpowiedniego równania. Omówiono również sytuacje, w których układ scalony nie ma funkcji miękkiego startu, ale jest ona wymagana w projekcie.
Soft Start i Prebias Soft Start
Gdy zasilanie jest po raz pierwszy doprowadzone do wejścia nieizolowanej przetwornicy scalonej DC-DC, kondensator wyjściowy jest zwykle całkowicie rozładowany. Napięcie wyjściowe jest więc równe zero. Z układowego punktu widzenia, podczas próby szybkiego naładowania kondensatora wyjściowego ścieżka od wejścia do wyjścia wykazuje niską impedancję, powodując nasycenie pętli sprzężenia zwrotnego przetwornicy przełączającej. W takim przypadku przetwornica dostarcza szczytowy prąd przełączania równy ograniczeniu prądowemu układu scalonego. Bez miękkiego startu, taki skokowy prąd rozruchowy może potencjalnie spowodować awarię przełącznika zasilania, nasycenie cewki indukcyjnej, a także może całkowicie uniemożliwić uruchomienie układu scalonego z powodu błędu ograniczenia prądu. W przypadku niektórych przetwornic przełączających DC-DC można mówić o funkcji miękkiego startu prebias, która występuje, gdy na obciążeniu (a więc na pojemności wyjściowej) występuje jakieś napięcie, zanim zasilacz DC-DC zostanie włączony. Stan prebias może wystąpić w projektach zasilania wielokrotnego lub redundantnego, w których napięcie znajduje ścieżkę przez tranzystor polowy (FET) lub diody zaciskowe (clamp) układu logicznego, takiego jak FPGA/ASIC. Jeśli napięcie to przekroczy napięcie miękkiego startu, a układ scalony nie ma obwodu zapobiegającego prebiasowi, układ scalony odbierze napięcie wyjściowe jako zbyt wysokie i aktywuje FET po stronie niskiego napięcia w celu rozładowania napięcia wyjściowego. To z kolei może skutkować wysokim poborem prądu przez cewkę indukcyjną. Większość współczesnych układów scalonych zawiera obwód prebias, który zapobiega przełączaniu tranzystorów FET, dopóki napięcia na wyprowadzeniach miękkiego startu i sprzężenia zwrotnego nie będą równe. To w tym momencie rozpoczyna się proces miękkiego startu.
Prąd płynący w kondensatorach wyjściowych podczas uruchamiania jest określony wyrażeniem:

Z równania wynika, że prąd rozruchowy wzrośnie jeśli zwiększy się pojemność lub wzrośnie napięcie przyłożone podczas rozruchu, albo skróci się czas trwania miękkiego startu.. Miękki start wprowadza ścieżkę o wyższej impedancji, umożliwiając kondensatorom wyjściowym kontrolowane ładowanie. Typowe sposoby implementacji miękkiego startu obejmują stopniowe zwiększanie napięcia odniesienia lub kontrolowanie narastania prądu przełącznika zasilania.
Implementacje miękkiego startu
Istnieją dwie implementacje miękkiego startu: miękki start napięciowy i miękki start prądowy. Miękki start napięciowy jest bardzo powszechny w przetwornicach obniżających napięcie, a jako przykład można podać układ LT8640. Jest to przetwornica buck pierwszej generacji Silent Switcher®, która ma VIN (maks.) 42 V i jest w stanie dostarczyć prąd obciążenia o natężeniu 5 A. Na rysunku 1 przedstawiono sekcję schematu blokowego odpowiedzialną za miękki start napięcia.
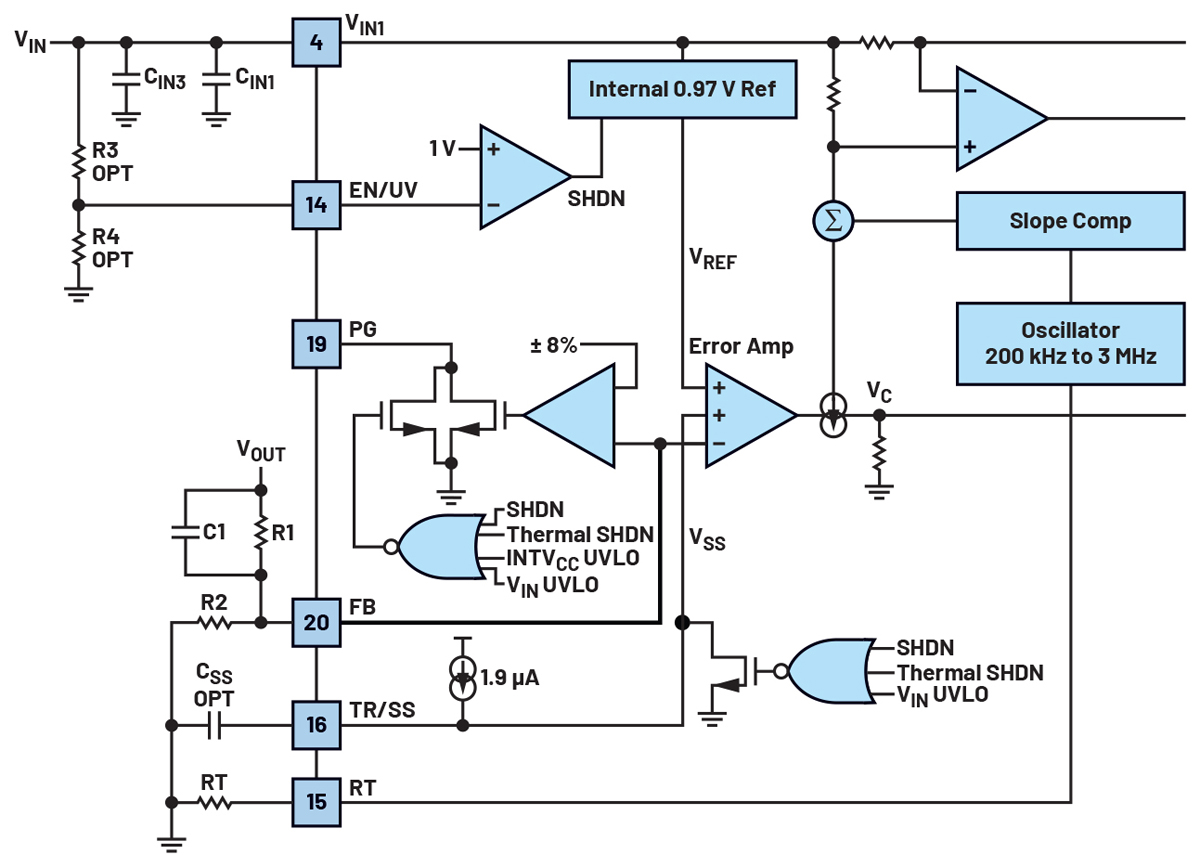
Rys. 1. Napięcie miękkiego startu popularne dla przetwornic buck, przykład schematu blokowego LT8640
Podczas trwania miękkiego startu tSS, źródło prądu podłączone do wyprowadzeniu miękkiego startu ładuje kondensator miękkiego startu, powodując stopniowy wzrost napięcia na styku miękkiego startu od zera do napięcia odniesienia (REF). W schemacie miękkiego startu napięcia, zewnętrzna pętla regulacji napięcia wykorzystuje napięcie na wyprowadzeniu miękkiego startu jako odniesienie do regulacji napięcia wyjściowego (VOUT), dopóki napięcie sprzężenia zwrotnego (FB) nie osiągnie napięcia REF. W tym momencie pętla przełącza się na wykorzystanie wewnętrznego napięcia REF do regulacji VOUT. Stopniowy wzrost napięcia odniesienia pętli zewnętrznej jest osiągany poprzez wymuszenie, aby napięcie FB było równe napięciu miękkiego startu VSS, w czasie potrzebnym do zwiększenia napięcia VOUT od zera do napięcia docelowego. Ponieważ źródło prądu, ISS, które ładuje kondensator miękkiego startu, CSS, jest źródłem prądu stałego, możemy zapisać równanie miękkiego startu jako:

Kondensator CSS jest ładowany do napięcia odniesienia, równanie można więc zapisać jako:

Dla LT8640 ISS =1,9 µA i VREF=0,97 V
Na rysunku 2 przedstawiono sekcję schematu blokowego odpowiedzialną za funkcję prądowego miękkiego startu w układzie LT8362, przetwornicy podwyższającej, który zawiera tranzystor FET mocy 60 V/2 A i może być również używany w projektach SEPIC lub odwracających. Ze schematu blokowego wynika, że REF wzmacniacza błędu zewnętrznej pętli regulacji napięcia jest bezpośrednio podłączony do stałego odniesienia. Podczas miękkiego startu napięcie wejściowe komparatora ograniczenia prądu szczytowego stopniowo wzrasta, wykorzystując napięcie na wyprowadzeniu miękkiego startu jako odniesienie dla ograniczenia prądu szczytowego. Proces narastania trwa aż do osiągnięcia pełnego ograniczenia prądu szczytowego. Funkcja miękkiego startu steruje narastaniem prądu przełącznika zasilania poprzez sterowanie narastaniem napięcia VC przez tranzystor Q1. Zasadniczo powoduje to zwiększanie dostępnego prądu cykl po cyklu w celu naładowania kondensatora wyjściowego. W przeciwieństwie do miękkiego startu napięciowego, w którym kondensator softstartu (CSS) kontroluje szybkość, z jaką REF, a następnie VFB i VOUT są zwiększane, w miękkim starcie prądowym kondensator CSS odpowiada za zwiększanie prądu szczytowego w danym czasie podczas trwania miękkiego startu. W rezultacie nie ma już prostej liniowej zależności między kondensatorem CSS a źródłem prądu. Czas potrzebny do zwiększenia napięcia wyjściowego od zera do ustawionego punktu regulacji, zależy od różnych czynników, w tym VOUT, COUT i prądu obciążenia.

Rys. 2. Prądowy układ miękkiego startu, schemat blokowy LT8362
Jak przewidzieć tSS, czas miękkiego startu?
W systemach wykorzystujących napięciowy układ miękkiego startu jest to stosunkowo proste, ponieważ równanie czasu miękkiego startu (tSS) jest często liniowe i podane w danych katalogowych. Oznacza to, że jeśli określona pojemność kondensatora miękkiego startu (CSS) zapewnia określony czas miękkiego startu, podwojenie wartości CSS spowoduje podwojenie czasu miękkiego startu. Na przykład, jeśli CSS=1 nF zapewnia 1 ms czasu miękkiego startu, to CSS o pojemności 2 nF spowoduje zwiększenie czasu tSS do 2 ms. Można sprawdzić to w praktyce korzystając z płytki demonstracyjnej LT8640 poprzez zmianę kondensatora miękkiego startu C8 z 0,1 μF na 1 μF. Zmiana pojemności kondensatora odpowiednio zmieni czas miękkiego startu, zapewniając dłuższy czas miękkiego startu.
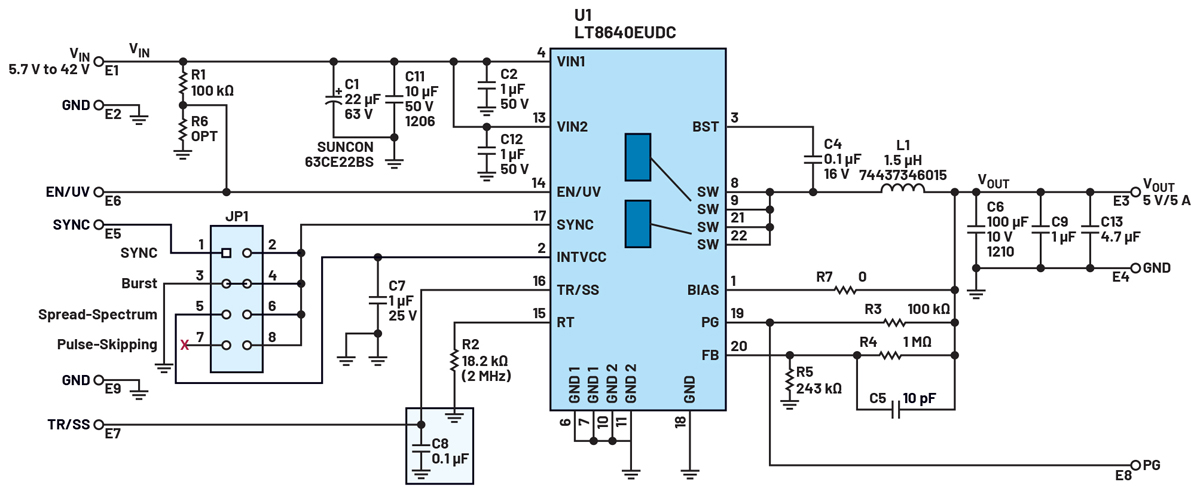
Rys. 3. Schemat płytki demonstracyjnej LT8640; C8 to kondensator miękkiego startu
Dla każdej zmiany C8, zmieniany jest prąd obciążenia. Miękki start jest obserwowany przy prądzie 0 A, a następnie przy prądzie obciążenia 4 A. Ponieważ 1 μF jest 10 razy większy niż 0,1 μF, oczekuje się, że czas miękkiego startu również zmieni się 10-krotnie.
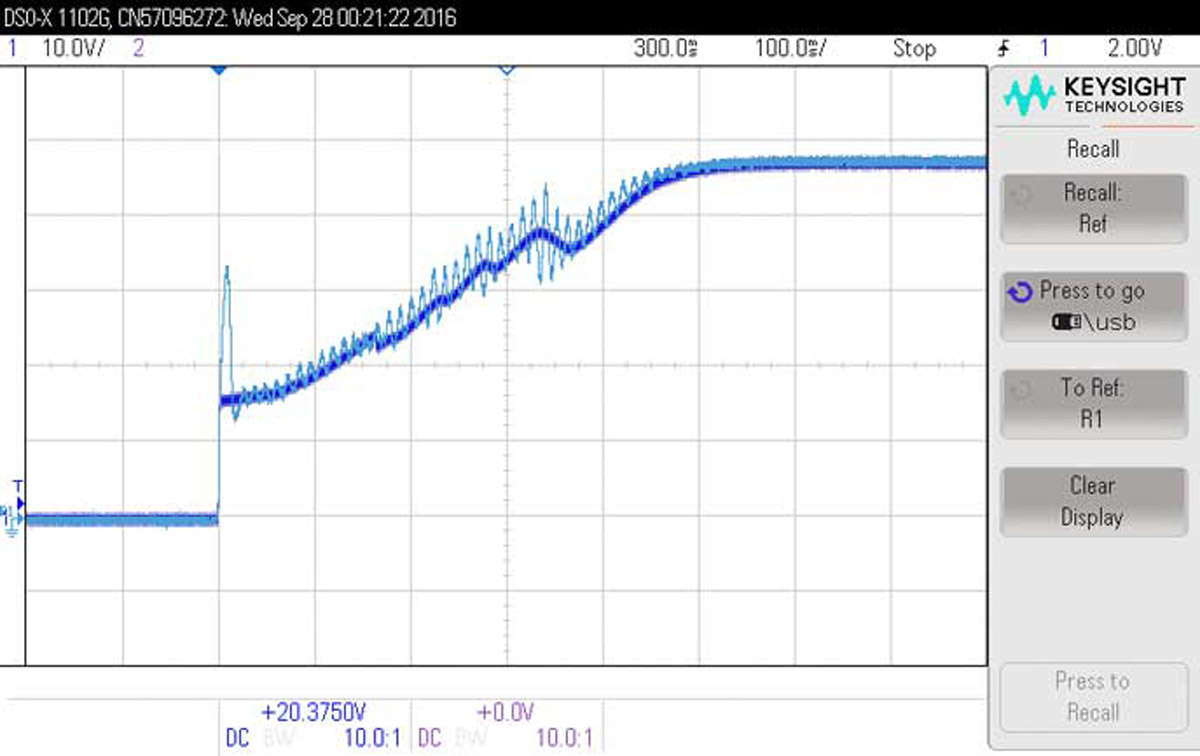
Na rysunku 4 (C8=0,1 μF) i na rysunku 5 (C8=1 μF) przebieg ciemnoniebieski odpowiada obciążeniu 0 A, a przebieg jasnoniebieski odpowiada obciążeniu 4 A. Dla obu prądów obciążenia czas rozruchu jest taki sam, więc czas miękkiego startu jest taki sam. Zgodnie z oczekiwaniami, czas rozruchu jest 10 razy dłuższy dla 1 μF, a wyniki zmieniły się z 50 ms (0,1 μF) na 500 ms (1 μF). Zmiana prądu obciążenia nie miała wpływu na czas rozruchu.
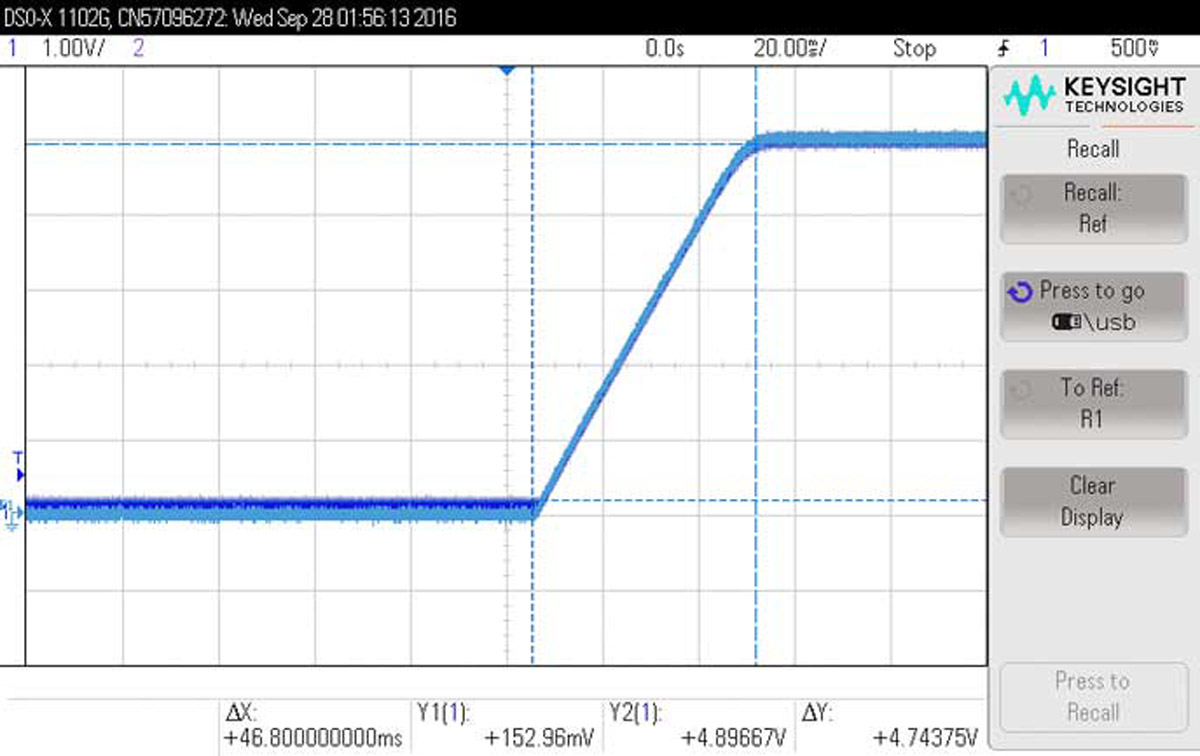
Rys. 4. LT8640. C8=0,1 μF, z czasem rozruchu 50 ms dla prądów obciążenia 0 A (żółty) i 4 A (brązowy)
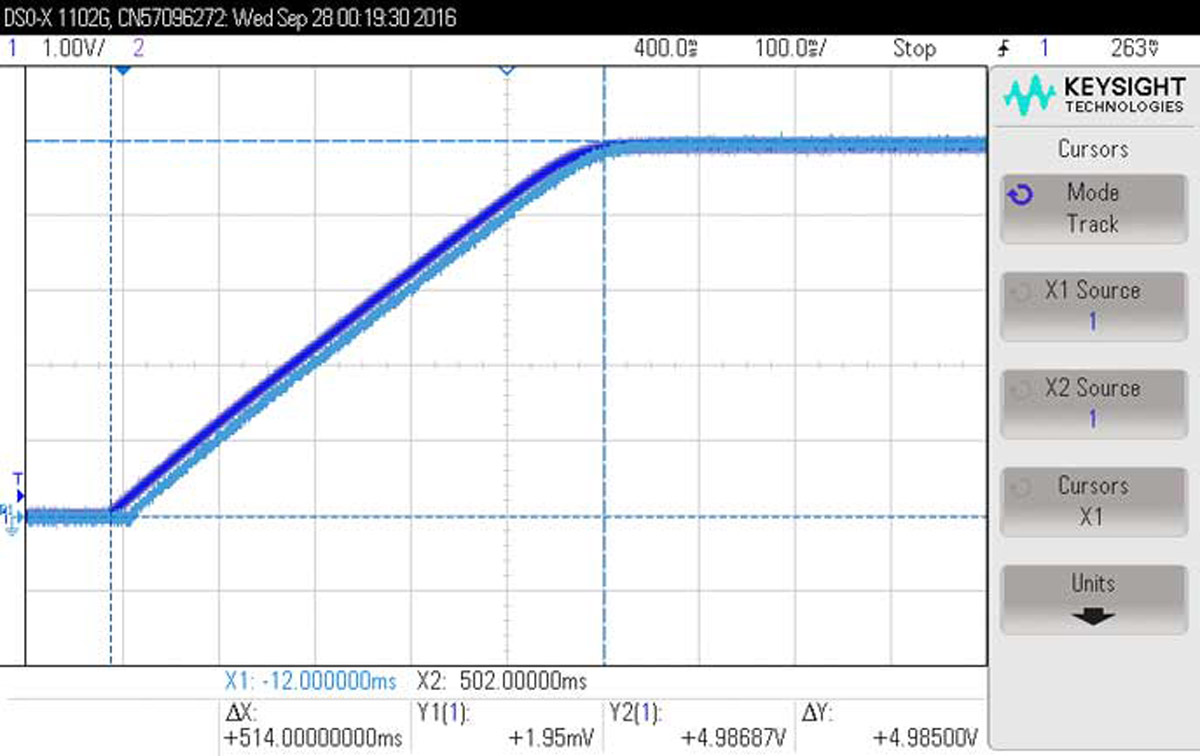
Rys. 5. LT8640. C8=1 μF, czas rozruchu wynosi 500 ms, a prąd obciążenia nie wpływa na czas rozruchu
W karcie katalogowej układu LT8362 nie podano równania miękkiego startu. Korzystając z płytki demonstracyjnej (rys. 6), można przeprowadzić test czasu miękkiego startu, zmieniając wartości kondensatora miękkiego startu C6 i testując dla trzech różnych wartości prądu obciążenia: 0 A (bez obciążenia), 0,19 A i 0,38 A.
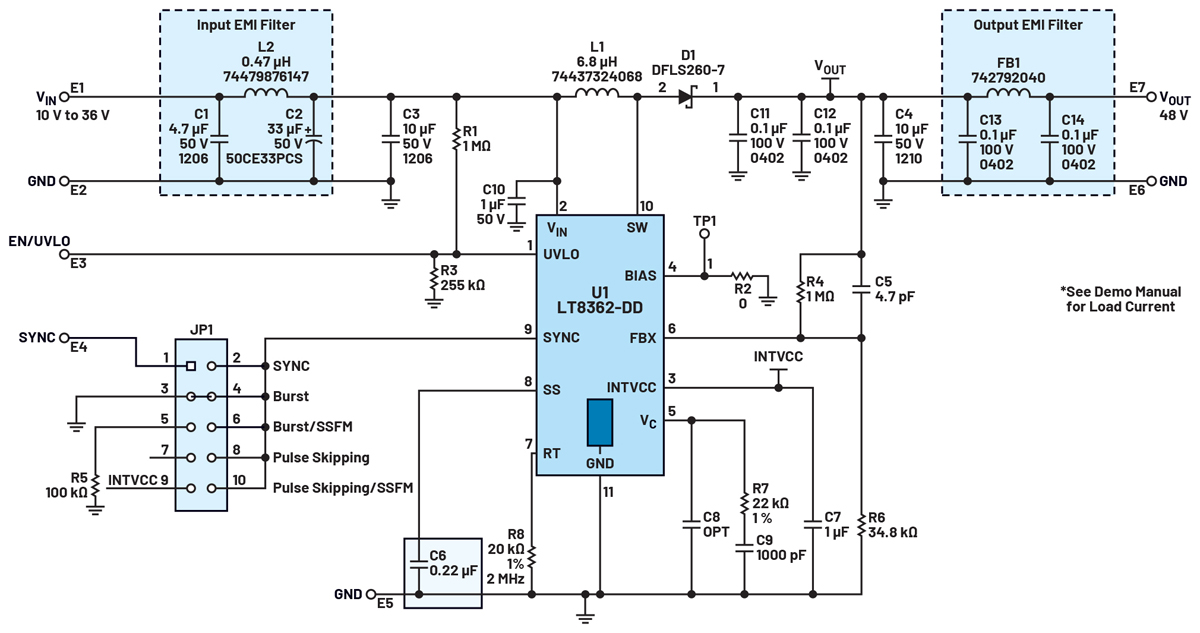
Rys. 6. Schemat płytki demonstracyjnej LT8362. C6, kondensator miękkiego startu i prąd obciążenia zostaną zmienione
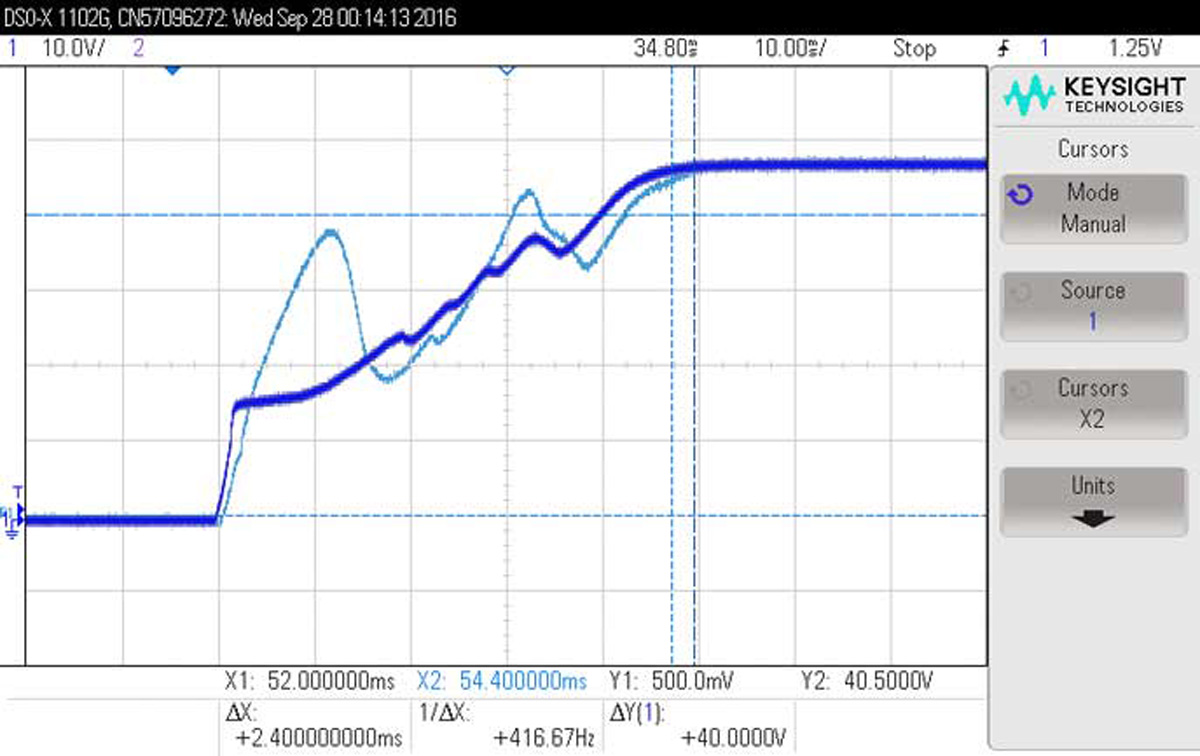
Na rysunku 7, C6=0,22 μF, prąd obciążenia wynosi 0,19 A (ciemnoniebieski) i 0,38 A (jasnoniebieski). Gdy obciążenie wzrasta, czas miękkiego startu wydłuża się. Różnica w czasie rozruchu wynosi ~10 ms, 45 ms zmieniło się na ~55 ms. Zwróć uwagę na zafalowania widoczne w początkowym fragmencie przebiegu. Efekt ten jest wynikiem testowania z obciążeniem cyfrowym, które dąży do utrzymania stałej rezystancji, podczas gdy wyjście ulega szybkim zmianom. Obciążenie cyfrowe jest ustawione na CR (stała rezystancja). Jeśli obciążenie zostanie zmienione na czysto rezystancyjne, obserwuje się bardziej stabilne i monotoniczne zachowanie podczas uruchamiania, jak pokazano na rysunku 8. Ponieważ wyniki czasowe są prawie takie same między obciążeniem cyfrowym a obciążeniem rezystancyjnym, testowanie różnic rozruchowych można kontynuować przy użyciu obciążenia cyfrowego.
Rys. 7. C6=0,22 μF. Zmiana prądu obciążenia z 0,19 A na 0,38 A zmienia czas miękkiego startu
Rys. 8. CSS=0,22 μF, obciążenie cyfrowe dla CR (brązowy) vs. obciążenie rezystancyjne (żółty), 0,19 A
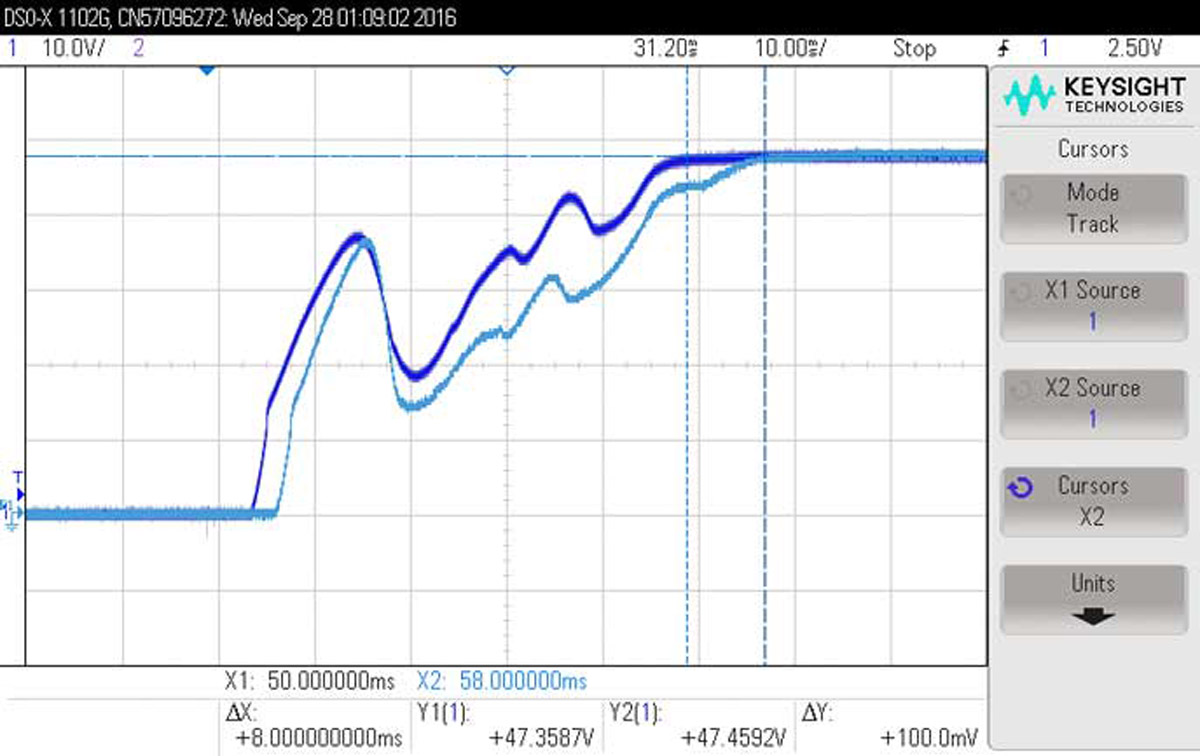
Na rysunku 9 pojemność C6 została zmieniona na 2,2 μF, a czas rozruchu zmienił się w porównaniu z rysunkiem 8 z ~45 ms do ~500 ms dla 0,19 A (ciemnoniebieski) oraz z ~55 ms do ~580 ms dla prądu 0,38 A (jasnoniebieski). Jest to blisko 10-krotnie więcej niż wartość współczynnika kondensatora miękkiego startu. Jednak teraz, w przeciwieństwie do układu LT8640, w którym jest zaimplementowany napięciowy układ miękkiego startu, prąd obciążenia wpływa w czasie miękkiego startu. Wynik pokazuje, że efekt falowania pokazany na rysunku 7, został zredukowany, ale w przebiegu rozruchu występuje pewne tętnienie. Na rysunku 10 przedstawiono porównanie przebiegu przy obciążeniu cyfrowym (ciemnoniebieski) z przebiegiem dla czystego obciążenia rezystancyjnego (jasnoniebieski). Czas rozruchu i średnia wartość obciążenia cyfrowego ostatecznie pokrywają się z wartościami obciążenia czysto rezystancyjnego. Obserwacje te wskazują, że chociaż prąd obciążenia wpływa na czas miękkiego startu w tym scenariuszu, obciążenie cyfrowe nadal jest w stanie kompensować i osiągać podobne wyniki jak obciążenie czysto rezystancyjne.
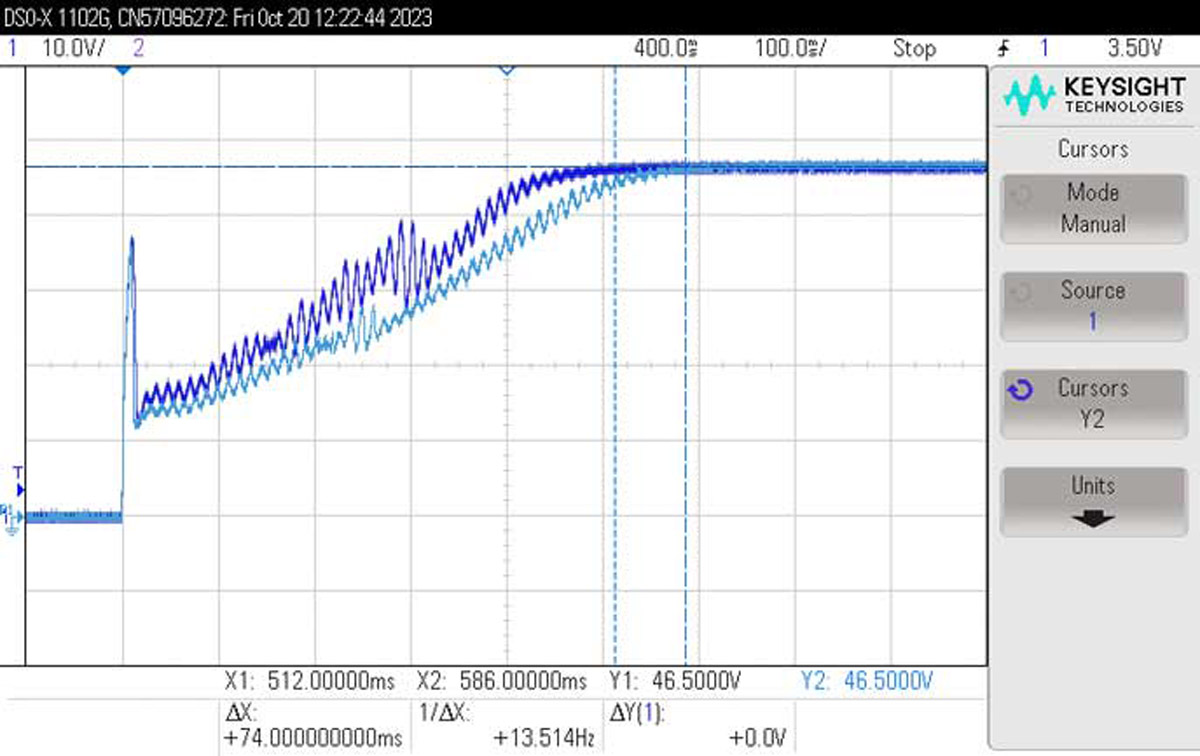
Rys. 9. Zmiana czasu rozruchu C6=2,2 μF przy zmianie prądu obciążenia z 0,19 A na 0,38 A
Rys. 10. C=2,2 μF, dłuższy czas rozruchu ułatwia obciążeniu cyfrowemu ustawienie prawidłowego CR
Tematyka dotycząca miękkiego startu będzie kontynuowana w 2. części artykułu.
Autor: Rani Feldman, Field Applications Engineer
Rani Feldman dołączył do Analog Devices w 2017 roku jako starszy inżynier ds. zastosowań terenowych. Wcześniej przez trzy lata pracował dla Linear Technology (obecnie część ADI). Uzyskał tytuł licencjata w dziedzinie inżynierii elektronicznej w Afeka College w Izraelu oraz tytuł magistra w dziedzinie biznesu i administracji w Holon Institute of Technology w Izraelu.
 [RAQ] Analiza zasilaczy impulsowych i prostowników: przekroczenia parametrów cewki indukcyjnej
[RAQ] Analiza zasilaczy impulsowych i prostowników: przekroczenia parametrów cewki indukcyjnej  [RAQ] Jak używając transceivera IO-Link do zarządzania łączem danych można uprościć wybór mikrokontrolera?
[RAQ] Jak używając transceivera IO-Link do zarządzania łączem danych można uprościć wybór mikrokontrolera?  [RAQ] Czy można sterować tranzystorami GaNFET za pomocą sterownika DC-DC pierwotnie zaprojektowanego dla krzemowych tranzystorów MOSFET?
[RAQ] Czy można sterować tranzystorami GaNFET za pomocą sterownika DC-DC pierwotnie zaprojektowanego dla krzemowych tranzystorów MOSFET? 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



