





Projekty inteligentnych sterowników przetwornic buck z tranzystorami GaN — część 1: Zagadnienia i pomiary
Przetwornice synchroniczne działają na zasadzie naprzemiennego (włączanie i wyłączanie) przełącznika sterującego oraz synchronicznego elementu przełączającego (zazwyczaj tranzystora FET). Czas trwania tej operacji ma znaczenie. Jeśli opóźnienie między wyłączeniem jednego przełącznika a włączeniem drugiego jest dłuższe niż to konieczne, spada sprawność przetwornicy. Jeśli opóźnienie nie jest wystarczająco długie, może wystąpić zjawisko znane jako shoot-through, polegające na przepływie bardzo dużego prądu przez parę aktywnych jednocześnie tranzystorów przełączających. Zjawisko to znacznie obniża również sprawność, a ponadto może spowodować uszkodzenie komponentów. Zrozumienie dynamiki tego zjawiska oraz sposobów jego prawidłowego pomiaru omówiono w 1. części artykułu poświęconego projektom inteligentnych przetwornic buck (obniżających napięcie) z zastosowaniem tranzystorów GaN.
Wprowadzenie
Układy przetwarzania mocy tranzystorów polowych (FET) z szeroką przerwą energetyczną opartych na azotku galu (GaN) zapewniają wyższą gęstość energii, szybsze przełączanie oraz mniejsze straty dzięki znacznie niższej pojemności bramki (Cg). Tranzystory FET GaN mają jednak bardzo wąskie granice VGS i nie występuje w nich dioda podłożowa (body diode). Jeśli szybkość narastania napięcia bramki zostanie obniżona w celu uniknięcia oscylacji bramki, to na skutek braku tej diody straty związane z przewodzeniem wstecznym są znacznie wyższe, a czasy martwe dłuższe. Nadal jednak są one narażone na szkodliwe skutki zjawiska shoot-through. Aby w pełni wykorzystać zalety tych tranzystorów, należy zatem zoptymalizować czas martwy. Rozważmy typowe zastosowanie przedstawione na rysunku 1. Jest to stabilizator z przetwornicą obniżającą napięcie wejściowe mieszczące się w przedziale od 15 V do 36 V na napięcie wyjściowe 12 V/15 A, w której został zastosowany układ LTC7891. Układ jest zaprojektowany specjalnie do sterowania tranzystorami GaN. Zbadamy, jak dokładnie zmierzyć czas martwy i przesterowanie, jednocześnie optymalizując rezystancję bramki przy zastosowaniu tego układu aplikacyjnego.
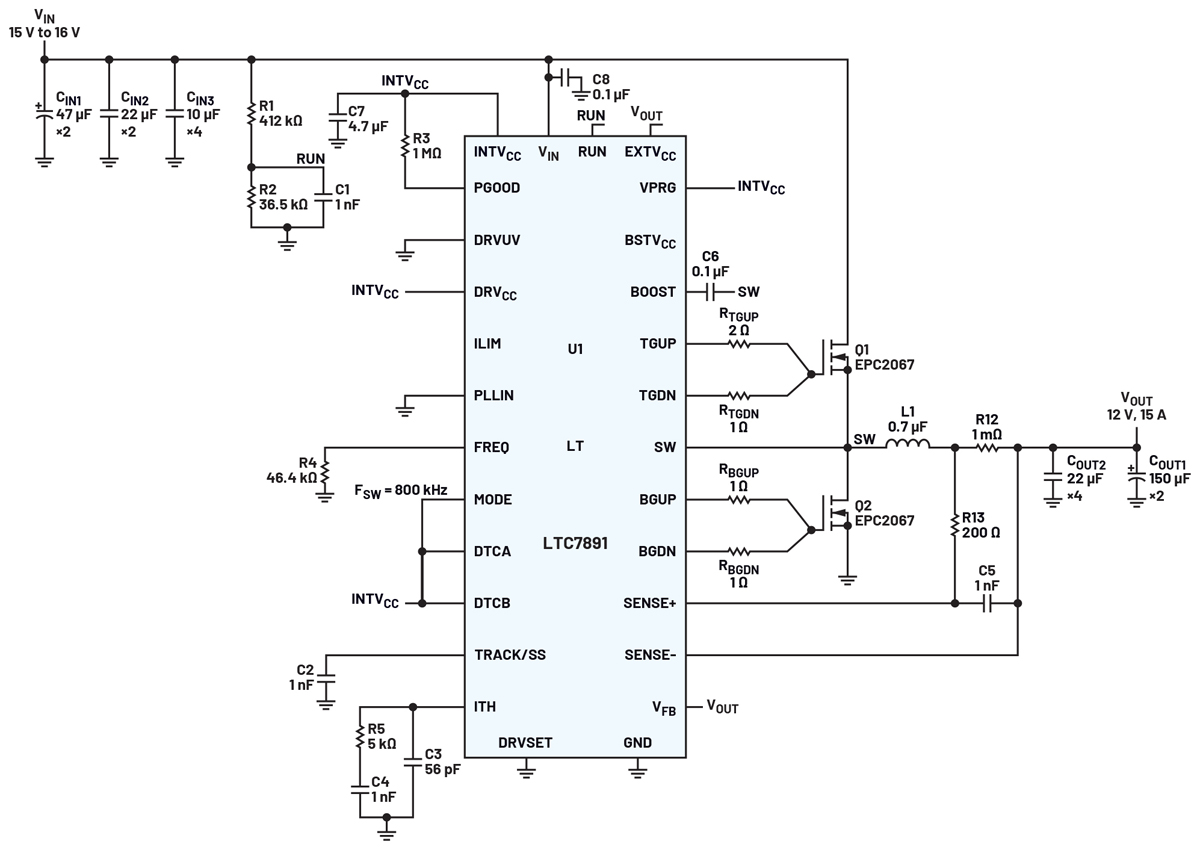
Rys. 1. Stabilizator z przetwornicą buck pracującą z częstotliwością przełączania 800 kHz, o napięciu wejściowym od 15 V do 36 V i napięciu wyjściowym 12 V, zapewniająca prąd wyjściowy do 15 A
Uwagi dotyczące przełączania
Obwód przełączający przetwornicy buck z inteligentnym czasem martwym bliskim zeru składa się ze sterownika górnej bramki (TG) przełącznika sterującego Q1 oraz dolnej bramki (BG) przełącznika synchronicznego Q2. Górna bramka jest sterowana za pomocą oddzielnych rezystorów podciągających/ściągających (TGUP, TGDN), a dolna bramka za pomocą oddzielnych rezystorów podciągających/ściągających, (BGUP, BGDN). Prądy przełączania podczas każdego cyklu przełączania są uśredniane za pomocą sieci filtrów wyjściowych L1 i COUT w celu uzyskania stabilizowanego napięcia wyjściowego.
Idealny przetwornik miałby bezstratne przełączniki, które podczas idealnej synchronizacji włączałyby się i wyłączały natychmiast. Jednakże, chociaż tranzystory GaN FET mogą ze względu na ich niską pojemność być włączane i wyłączane szybciej niż tranzystory wykonane w innych technologiach, występują opóźnienia między wydaniem przez sterownik polecenia włączenia przełącznika a osiągnięciem stanu pełnego włączenia. To samo dotyczy wyłączania. Z powodu tego opóźnienia występują straty przejściowe, które stają się istotną częścią całkowitych strat operacji przełączania. Straty te przekładają się na ciepło wytwarzane przez tranzystory przełączające, co obniża sprawność i ostatecznie nakłada ograniczenia termiczne na działanie tranzystora FET. Pytanie więc: jak praktycznie radzić sobie z tymi ograniczeniami narzuconymi przez nieidealne przełączniki?
Jeśli oba przełączniki są w pełni włączone – nawet przez ułamek sekundy – niski RDS(ON) oznacza zwarcie między VIN i GND, co skutkuje katastrofalną awarią przełącznika. Jeśli oba przełączniki są częściowo włączone, wysokie prądy drenu powodują natychmiastowy wzrost temperatury, który obciąża przełączniki i skraca ich żywotność. Stan ten znany jest shoot-through (rysunek 2). Początkowe faza przełączania zajmuje około 8 ns czasu martwego, a prąd przełączania ma normalną zależność di/dt związaną z przełączaniem na prąd wejściowy, a następnie narastającą w miarę ładowania cewki indukcyjnej. Następne przejście ma symetryczne zbocza narastające i opadające, co pozwala obu tranzystorom na częściowe włączenie i skutkuje ostrym skokiem prądu drenu, który nadal pozostaje poniżej I(DS)MAX. Ostatnie przejście pozwala na 2-nanosekundowe nakładania się czasu włączenia, a prąd drenu wzrasta znacznie powyżej znamionowego prądu drenu FET.
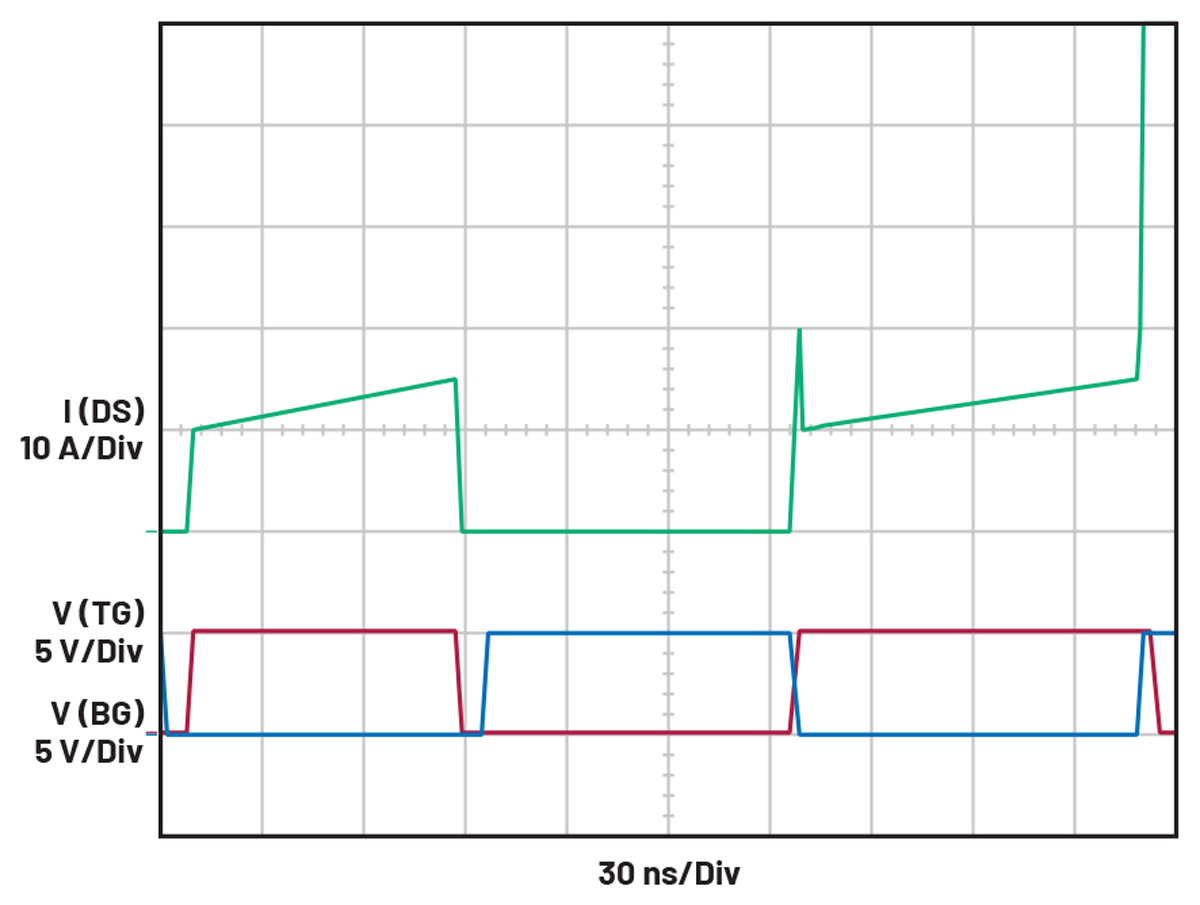
Rys. 2. Zjawisko shoot-through spowodowane niewystarczającym czasem martwym
Aby uniknąć tej sytuacji, sterowniki wyłączają jeden tranzystor, a następnie opóźniają włączenie drugiego – jest to okres określany jako czas martwy. Zapobiega to przebiciu shoot-through tylko wtedy, gdy zaprogramowany czas martwy jest wystarczająco długi do tego, by umożliwić przejście od stanu całkowitego włączenia do całkowitego wyłączenia (rysunek 2). Co jednak stanie się, jeśli czas ten będzie zbyt długi? Tranzystory MOSFET mają pasożytniczą diodę podłożową, która ogranicza napięcie w węźle przełącznika i zapobiega przebiciu wstecznemu, gdy tranzystor FET jest nadal wyłączony. Ta tymczasowa strata mocy VF × IDS obniża sprawność, im dłużej trwa pełne włączenie tranzystora FET i zastępuje iloczyn strat mocy VF × IDS (zazwyczaj od 0,8 V do 1,0 V) iloczynem IDS2 × RDS(ON), który jest znacznie niższy. Z drugiej strony tranzystory GaN FET nie mają w swojej strukturze diody podłożowej. Dla polaryzacji wstecznej napięcie zostanie ograniczone do znacznie wyższej wartości, dla struktury tranzystora z diodą podłożową typowo wynosi ona około 2 V. Oznacza to, że nawet przy umiarkowanych czasach martwych wystąpią nadmiernie wysokie straty mocy, co sprawia, że dla sterowników GaN FET niezbędne jest minimalizowanie czasu martwego. Aby temu zaradzić, w projektach opartych na tranzystorach MOSFET często umieszcza się diodę Schottky’ego na przełączniku synchronicznym, równolegle do tranzystora MOSFET, w celu zmniejszenia spadku napięcia przewodzenia podczas czasu martwego. Pojemność złącza diody szybko staje się jednak dominującym źródłem strat w zastosowaniach o wyższej częstotliwości przełączania, do których idealnie nadaje się GaN. Kompromisy związane z tymi rozważaniami przedstawiono w tabeli 1.
Tabela 1. Straty od 48 V do 12 V przy 500 kHz FSW i czasie martwym 20 ns
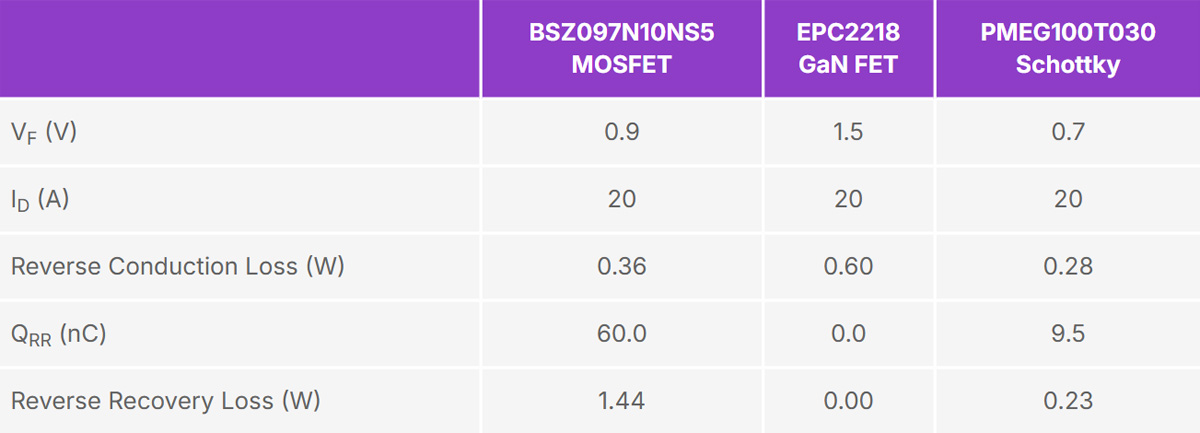
Tabela 2. Konfiguracja DTC
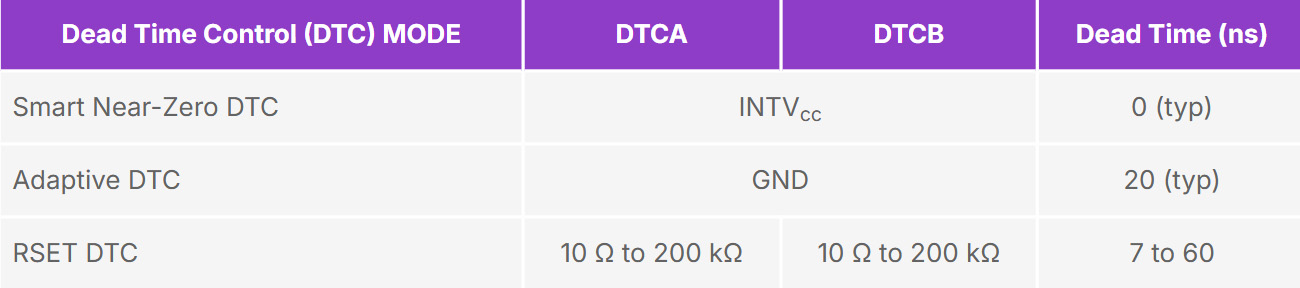
Konstrukcje oparte na GaN wydają się obecnie być między młotem a kowadłem. Zbyt krótki czas martwy powoduje przepływ zwrotny, co prowadzi do natychmiastowego przepalenia tranzystorów przełączających, zbyt długi czas martwy może z kolei spowodować ich odlutowanie się od płytki. Jak znaleźć właściwą równowagę między wydajną konwersją a odpowiednim marginesem bezpieczeństwa? Być może najprostszym sposobem rozwiązania tego dylematu jest wybór przetwornicy, która oferuje inteligentne czasy martwe bliskie zeru lub funkcje adaptacyjnego czasu martwego wbudowane w układ scalony. Przetwornice obniżające napięcie LTC7890 i LTC7891 to sterowniki o konstrukcji dual-/single-buck, zaprojektowane specjalnie do sterowania tranzystorami GaN FET. Mają one możliwość opcjonalnego inteligentnego wyboru czasu martwego bliskiego zeru lub adaptacyjnej, precyzyjnej regulacji rezystorem czasu martwego. Architektura monitoruje rzeczywiste poziomy VGS i VSW, aby inteligentnie sterować przebiegami czasowymi w celu osiągnięcia zarówno precyzji, jak i bezpieczeństwa dla każdego sterowanego tranzystora. Osiąga się to poprzez szybkie regulacje w celu precyzyjnego kontrolowania czasu martwego. Zamiast tradycyjnego sterowania bramką w pętli otwartej, zaprogramowany czas martwy jest regulowany na bieżąco, co daje gwarancję, że włączenie i wyłączenie nastąpi wtedy, gdy sterownik tego potrzebuje, a nie wtedy, gdy dyktuje to sygnał bramki wraz z pasożytniczą rezystancją i pojemnościami bramki. Jednocześnie osiąga się minimalizację strat związanych z przewodzeniem wstecznym i wykorzystuje się niemal zerowe straty związane z odzyskiem wstecznym, charakterystyczne dla GaN. Pełny przewodnik po tych trybach pracy przedstawiono w tabeli 2. Użytkownik musi jedynie sprawdzić, czy zaprogramowany tryb i taktowanie zostały poprawnie wdrożone. Proces weryfikacji stanowi jednak wyzwanie, z którym projektant musi się najpierw zmierzyć.
Kwestie związane z pomiarami i layoutem
Pomiar czasu martwego i przesterowania wymaga szczególnej dbałości o techniki pomiarowe i implementację. Tranzystory GaN FET mają znacznie bardziej rygorystyczne ograniczenia dotyczące napięcia VGS w porównaniu z tranzystorami MOSFET – zazwyczaj 5 V przy zakresie od +6 V do –4 V ABSMAX. Silny sygnał sterujący bramką w połączeniu z pasożytniczymi elementami reaktancyjnymi prowadzi do oscylacji, a krótkotrwałe przekroczenia wartości mogą nawet spowodować uszkodzenie tranzystorów GaN. Bramka GaN ma mniejszą pojemność względem pinu sterującego niż tranzystory MOSFET, co sprawia, że są one atrakcyjnymi elementami do stosowania przy wyższych częstotliwościach. Jednak same sondy zawierają pasożytnicze elementy reaktancyjne, które mogą zniekształcać przebieg i dostarczać nieprawidłowych informacji o tym, co widzi bramka bez sondy. Trzymanie sondy w dłoni przy użyciu minimalnego oprzyrządowania może prowadzić do katastrofy, jeśli dłoń się ześlizgnie. Użycie tradycyjnego przewodu z zaciskiem krokodylkowym nie wchodzi w grę. Klasycznie, w celu uzyskania dobrych pomiarów oscyloskopowych zalecano stosowanie niestandardowych technik sondowania z użyciem pigtaili, pod warunkiem, że ścieżka powrotna jest odpowiednio dobrana dla górnej bramki i węzłów przełącznika (rysunek 3). Nadal pozostawia to problem z sondowaniem pływającej górnej bramki. Jednym z rozwiązań jest użycie złącza typu MMCX lub pinów listwowych, które będą dopasowane do końcówek sond MMCX. Podczas gdy dolna bramka może być odniesiona do masy, górna bramka jest odniesiona do przełącznika, należy więc użyć jakiejś formy sondy izolowanej. Sondy optyczne, takie jak Tektronix TIVP lub nowszy model TICP, który charakteryzuje się mniejszym dryftem, mogą zapewnić tę izolację do pomiaru górnej bramki i wykorzystać złącze MMCX. Na rysunku 4 przedstawiono typową konfigurację pomiaru czasu martwego układu LTC7891, w której złącze MMCX znajduje się bezpośrednio pod pinem bramki FET i jest połączone z sondą optyczną 1 GHz.
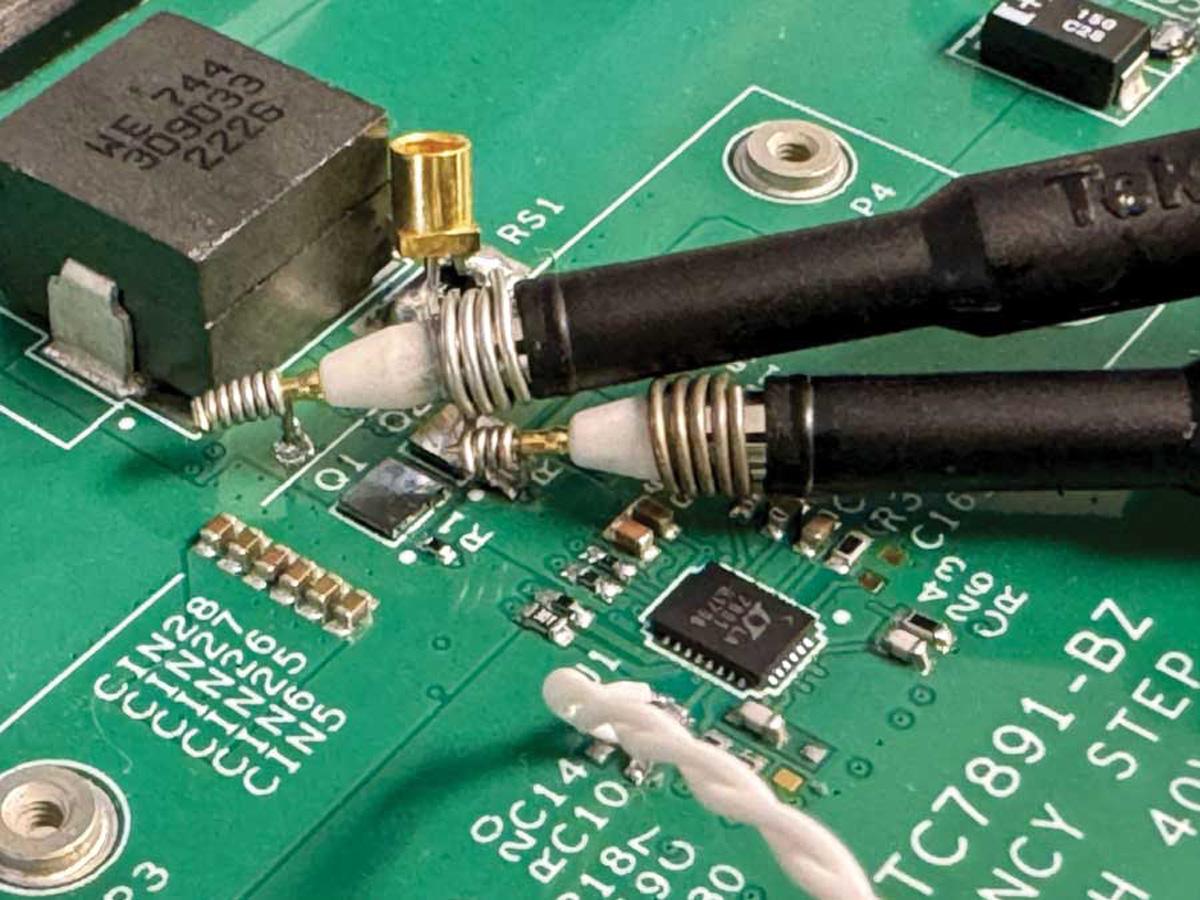
Rys. 3. Dobra technika pomiaru na dolnej bramce i przełączniku w celu zminimalizowania artefaktów oscylacyjnych
Same złącza stanowią studium przypadku kompromisu. Umieszczenie montowanego powierzchniowo złącza MMCX może zajmować fizyczną przestrzeń na płytce. Jest to trudne zagadnienie, które staje się istotne w przypadku ciasnego montażu układów o dużej gęstości mocy. Umieszczenie złącza (optymalne) bezpośrednio między wyprowadzeniami bramki i źródła tranzystora FET bez wprowadzania dodatkowej ścieżki bramki, może spowodować nadmierne rozproszenie się układu, bardziej niż jest to pożądane. Z drugiej strony, umieszczenie złącza z dla od układu wprowadza dodatkową indukcyjność i rezystancję ścieżki, co może pogorszyć dokładność pomiaru.
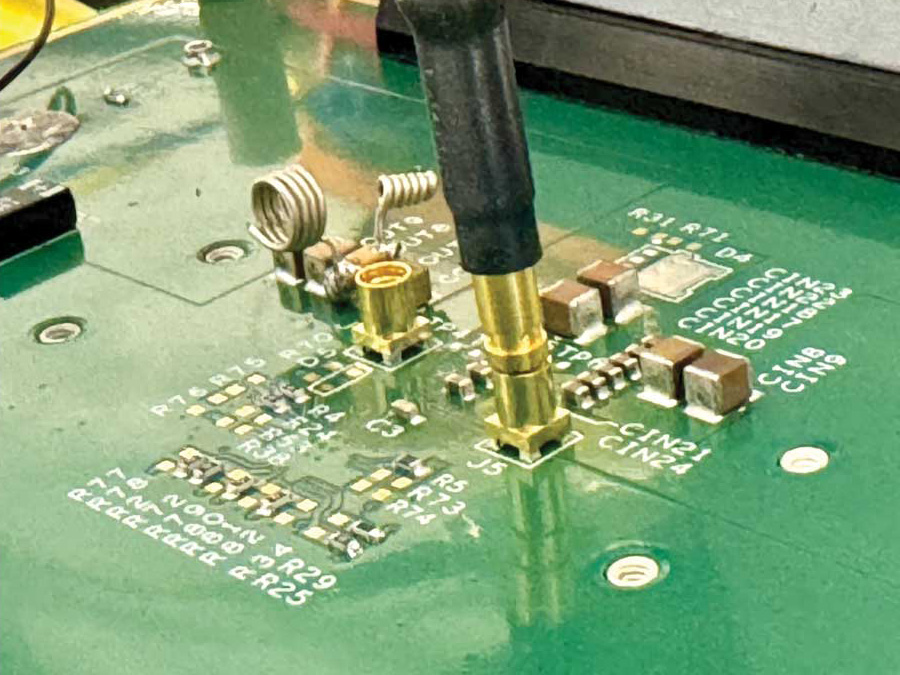
Rys. 4. Sonda optyczna Tektronix TIVP100 podłączona do górnej bramki za pomocą złącza MMCX
Inną alternatywą jest zastosowanie złączy przewlekanych, które można zamontować tylko na czas pomiaru, a następnie pominąć w ostatecznej wersji. Wiąże się to jednak z użyciem adaptera, który nieznacznie zwiększa liczbę elementów pasożytniczych, a także tworzy otwory w pierścieniu annularnym na wszystkich warstwach stosu padów. Dzięki optymalnemu wyważeniu kompromisów i starannemu podejściu do układu można osiągnąć minimalny poziom przesterowania i oscylacji spowodowanych elementami pasożytniczymi sondy (rysunek 5). W oryginalnym układzie zaznaczonym na czerwono złącze MMCX było solidnie połączone z węzłem przełącznika, a węzeł bramki był połączony przelotką i wewnętrzną ścieżką z padem bramki tranzystora GaN FET. Oryginalny układ zaznaczony na czerwono miał złącze MMCX połączone solidnie z węzłem przełączającym, a węzeł bramki połączony przelotką i ścieżką wewnętrzną z padem bramki tranzystora GaN FET. Czerwony przebieg wskazywał dzwonienie przekraczające +6,4 V/–9,1 V. Stosując te same rezystancje bramki 2,2 Ω pull-up/1,0 Ω pull-down, ale po zmodyfikowaniu układu zaznaczonego na niebiesko w celu oddzielenia korpusu MMCX od węzła przełącznika i zastosowaniu połączenia Kelvina, niebieski przebieg pokazuje oscylacje na poziomie +2,4 V/–1,8 V przy wyłączeniu górnej bramki. Najważniejszym wnioskiem jest to, że nawet niewielkie zmiany w układzie mogą mieć duży wpływ na zmierzoną wartość przesterowania, która jest kluczowym parametrem dla tłumienia przesterowania i zapewnienia, że tranzystory GaN FET nie są przeciążane.
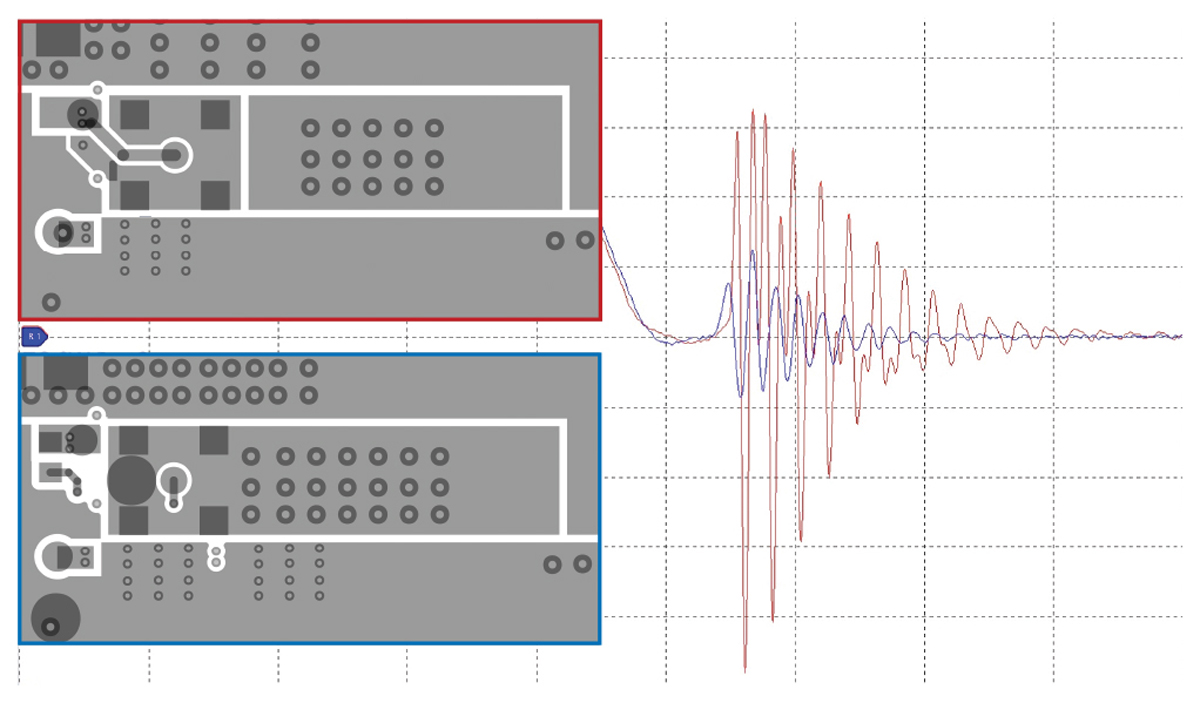
Rys. 5. Przebiegi wyłączania górnej bramki pokazujące wpływ elementów pasożytniczych w połączeniu sondy. Kolor czerwony: połączenie inne niż Kelvina, kolor niebieski: złącze MMCX z połączeniem Kelvina. 20 ns/div, 2 V/div przy użyciu sondy optycznej Tektronix TIVH 1 GHz.
Po zatwierdzeniu techniki pomiarowej można rozpocząć proces weryfikacji czasu martwego. Zawsze pierwszym krokiem jest skompensowanie przesunięcia czasowego sondy używanej do pomiaru przebiegu górnego z sondą mierzącą przebieg dolny przy zastosowaniu wspólnego źródła sygnału. Czas martwy jest względny, więc przesunięcie jednego kanału względem drugiego nie ma znaczenia, o ile wspólny sygnał pojawia się bez przesunięcia czasowego. Dzięki temu można również zapewnić, że wszelkie błędy wzmocnienia i przesunięcia (częste problemy w przypadku sond optycznych) zostaną skorygowane lub przynajmniej zidentyfikowane w celu późniejszej regulacji po pomiarze. Przed zebraniem danych wykorzystywanych do podejmowania decyzji należy poczekać, aż sondy optyczne osiągną stabilność termiczną. Często przydatne jest zapisanie wszelkich ustawień wzmocnienia i przesunięcia.
Przed przekroczeniem limitów mocy w projekcie po zakończeniu konfiguracji należy wykonać pomiar bazowy przy najniższym możliwym napięciu i prądzie obciążenia (niższe VIN dla przetwornicy buck, wyższe VIN dla przetwornicy boost). Przesterowanie bramki rośnie proporcjonalnie do napięcia wejściowego i prądu wyjściowego, więc jeśli projekt pracuje na granicy możliwości, najlepiej wykryć i skorygować ten problem przed przekroczeniem jakichkolwiek limitów. Jeśli oscyloskop używany do testowania ma kursory odniesienia, przydatne jest umieszczenie ich na górnej i dolnej granicy specyfikacji arkusza danych GaN VG jako wizualnej sygnalizacji dopuszczalnych zakresów. Do wyzwolenia i nałożenia przebiegów górnej i dolnej bramki należy użyć przebiegu węzła przełącznika. Pozwoli to uzyskać optymalny obraz czasu martwego. Do pomiaru przebiegów górnej bramki najlepiej użyć sondy różnicowej lub optycznej. Jeśli pomiar musi być wykonany względem masy, często pomocne jest użycie funkcji matematycznych oscyloskopu (jeśli są dostępne) w celu odjęcia węzła przełącznika od wejść węzła górnej bramki. W ten sposób uzyskuje się do analizy przebieg oparty na masie wirtualnej.
Wnioski
Właściwe techniki projektowania, pomiarów i gromadzenia danych opisane w niniejszym dokumencie powinny zapewnić projektantom systemów wysoki poziom pewności co do niezawodności projektów opartych na tranzystorach GaN, realizowanych przy użyciu sterowników przetwornic obniżających napięcie LTC7890 i LTC7891. Po skonfigurowaniu prototypu w celu dokładnego pomiaru przebiegów przełączania na stole pomiarowym projektant może wybrać konfigurację, a następnie zoptymalizować sygnały sterujące bramką. Zostanie to omówione w artykule „Inteligentne projekty kontrolerów buck GaN — część 2: Konfiguracja i optymalizacja”.
Opracowanie: Jarosław Doliński
 Projektowanie układów IC-CPD: Podstawowe wytyczne dotyczące sprzętu i oprogramowania dla urządzeń sterowania i zabezpieczeń wbudowanych w kabel ładowania
Projektowanie układów IC-CPD: Podstawowe wytyczne dotyczące sprzętu i oprogramowania dla urządzeń sterowania i zabezpieczeń wbudowanych w kabel ładowania  Projektowanie płytek drukowanych o wysokiej wierności dla wielokanałowych układów formowania wiązki — część 1: Straty odbiciowe
Projektowanie płytek drukowanych o wysokiej wierności dla wielokanałowych układów formowania wiązki — część 1: Straty odbiciowe 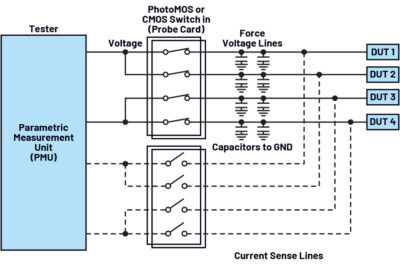 Wymiana przełączników PhotoMOS w automatycznych urządzeniach testujących
Wymiana przełączników PhotoMOS w automatycznych urządzeniach testujących 

![O konkursie organizowanym przez firmę TRUMPF Huettinger i polskie uczelnie techniczne opowiada Alicja Peresada i prof. Jacek Rąbkowski oraz kilkoro nagrodzonych dyplomantów: mgr inż. Jakub Dobosz, inż. Maja Zielińska, dr inż. Jakub Kołodziej, dr inż Weronika Hryniewska-Guzik i dr inż. Grzegorz Bartyzel. Zapraszamy do obejrzenia filmu! [materiał redakcyjny]](https://mikrokontroler.pl/wp-content/uploads/2026/07/TRUMPF-czolowka.png "https://www.youtube.com/watch?v=XkeyLmtLfxo")



